Sistema y método para encontrar el norte.
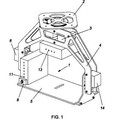
Una carga útil (200) que incluye un ensamblaje de suspensión cardán (203) y ensamblaje de giroscopio asociado (201),
comprendiendo un control de ensamblaje de giroscopio (202) asociado a dicho ensamblaje de giroscopio (201) y operable para activar el ensamblaje de giroscopio (201) para obtener mediciones de desviación (204) en el plano de azimut y plano de elevación y procesar las mediciones en un primer intervalo dinámico que corresponde a un primer intervalo de velocidad de rotación, para estabilizar la carga útil utilizando dicho ensamblaje de suspensión cardán (203); caracterizado porque el control del ensamblaje de giroscopio (202) es operable para activar el ensamblaje de giroscopio (201) para obtener mediciones instantáneas de un girómetro de elevación (105) y procesar las mediciones en un segundo intervalo dinámico que corresponde a un segundo intervalo de velocidad de rotación que tiene más sensibilidad que dicho primer intervalo dinámico, para encontrar la desviación de la carga útil del norte de la Tierra.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2011/050006.
Solicitante: ISRAEL AEROSPACE INDUSTRIES LTD..
Inventor/es: KAGAN,AVRAHAM, BENISTY,MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C19/38 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 19/00 Giróscopos; Dispositivos sensibles al giro con masas vibratorias; Dispositivos sensibles al giro sin masas móviles; Medida de velocidad angular usando efectos giroscópicos. › con funcionamiento de búsqueda del norte por medios que no sean magnéticos, p. ej. girocompases que utilizan la rotación de la tierra.
- G01C21/18 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Plataformas estabilizadas, p. ej. mediante giróscopo.
PDF original: ES-2537279_T3.pdf
Fragmento de la descripción:
Sistema y método para encontrar el norte.
CAMPO DE LA INVENCIÓN
[1] Esta invención hace referencia al campo de los sistemas y métodos para encontrar el norte. ANTECEDENTES DE LA INVENCIÓN
[2] Se enumeran a continuación las referencias de la técnica anterior consideradas relevantes como antecedentes de la invención. La mención de las referencias en esta memoria no debe deducirse que implique que estas son relevantes en modo alguno para la patentabilidad de la Invención aquí descrita. El documento US 4945647 revela un sistema de girocompás destinado a equipos de tierra que requieren información de referencia de norte e incluye una implementación de girocompás novedosa que permite la utilización de sensores inerciales de alta calidad mientras se logra el objetivo deseado de un coste moderado. El sistema para encontrar el norte se diseña para proporcionar alta precisión con un tiempo de reacción rápido en un amplio margen de temperatura sin la ayuda de calentadores u otro equipamiento auxiliar. El mecanismo está configurado específicamente para tolerar el asentamiento y/o el movimiento de base oscilatorio sin tiempo de reacción adicional o degradación de la precisión del girocompás.
[3] El documento US 5.6.392 revela un sistema de girocompás destinado a equipo de tierra que requiere Información de referencia de norte, e incluye una Implementación de girocompás novedosa que permite la utilización de sensores inerciales de alta calidad mientras se logra el objetivo deseado de un coste moderado. El sistema para encontrar el norte está diseñado para proporcionar una alta precisión con un tiempo de reacción rápido en un amplio margen de temperaturas sin la ayuda de calentadores u otro equipamiento auxiliar. El mecanismo está configurado específicamente para tolerar el asentamiento y/o el movimiento de base oscilatorio sin tiempo de reacción adicional o degradación de la precisión del girocompás. El eje de entrada de un giroscopio usado en el sistema es sesgado, de manera que puede medir un componente de rotación de suspensión cardán, eliminando así la necesidad de medir de manera independiente el ángulo de cardán. La alineación de posición absoluta entre la suspensión cardán y la caja del sistema, como se requiere, se logra mediante un mecanismo de parada adecuado, que es una tarea más fácil que medir el ángulo de cardán relativo como se ha mencionado anteriormente.
[4] El documento US 5.272.922 revela un sistema de sensor de velocidad angular de elemento vibratorio y giroscopio para encontrar el norte. Un sistema de sensor de velocidad angular comprende preferiblemente elementos sensores y de accionamiento vibratorios espaciados en proximidad entre sí en una configuración de diapasón emparejado montado para rotar sobre un eje rotacional orientado perpendicular a los ejes sensibles. El ensamblaje de accionamiento rotacional incluye un codificador para modular la orientación del elemento sensible y medios de acoplamiento para transmitir las señales de salida y accionamiento a y desde los elementos giratorios. Cada par de elementos sensores y de accionamiento se dispone en oposición uno al lado del otro paralelos no alineados a través del eje de rotación. Los elementos pueden portarse en masas torsionales que incluyen un acoplamiento elástico entre ellas. El sistema sensor de velocidad angular puede utilizarse como giroscopio para buscar el norte en aplicaciones como la minería, prospección o artillería. La fase de señal de salida del sensor sinusoidal corresponde a la orientación entre el eje sensible de los elementos sensores y el vector de velocidad angular de la tierra para producir una referencia al norte geográfico. El filtro electrónico incluye un generador de señal, dos bucles de enganche de fase, amplificadores de CA, filtro paso banda, comparador, contador-divisor, y bloqueo para iterar una lectura de fase estable. Se requiere un tiempo de estabilización de aproximadamente 3-6 segunda para resolver una referencia de rumbo dentro de +,1 grado de norte geográfico. Un modo de realización de sesgo bajo de dos ejes del sistema sensor de velocidad angular puede utilizarse solo o en combinación con un sistema similar para proporcionar percepción de velocidad angular completa a lo largo de un eje común deseado, o con un segundo sensor de velocidad angular estacionario para mejorar el ancho de banda y respuesta CC del sensor de velocidad angular estacionario.
[5] El documento US 5.272.922 revela un sistema giroscópico de alta resolución para la medición angular precisa. El sistema incluye para las mediciones angulares planas un giroscopio, preferiblemente, un giroscopio láser, y un codificador de ángulo montado con sus ejes sensibles de manera coaxial sobre un árbol de plataforma giratoria, que se monta de manera rotable en una caja y es accionado a velocidad constante con respecto a la caja. La velocidad angular debería ser lo suficientemente elevada para operar el giroscopio láser por encima de la velocidad de bloqueo. Para la navegación y mediciones angulares espaciales se montan tres giroscopios con sus ejes sensibles dispuestos espaclalmente con respecto al árbol de plataforma giratoria para percibir el mismo componente de su velocidad angular. Para los errores de media debidos al factor de escala del giroscopio y desviación, la plataforma giratoria se monta sobre un segundo árbol con su eje perpendicular a la plataforma giratoria. El segundo árbol se proporciona con un segundo codificador y un motor que gira el segundo árbol. El
procesamiento de la lectura de señal del giroscopio o giroscopios y codificadores permite aumentar la precisión, resolución y ancho de banda de las mediciones angulares con respecto a la base fijada de manera local o el espacio ¡nerclal.
[6] El documento US 5.73.293 revela un sensor de velocidad rotacional con dos sensores de aceleración. Un sensor rotacional tiene un peso vibratorio con dos sensores de aceleración montados sobre el mismo. Los dos sensores de aceleración se diseñan para detectar fuerzas que actúan en un ángulo recto unas con otras. El peso vibratorio se pone en vibración por medio de dispositivos de accionamiento, y la rotación de los sensores rotacionales sobre dos ejes de rotación que son normales entre sí se detecta con la ayuda de los sensores de aceleración. Las fuerzas de Coriolis en un plano se determinan de este modo.
[7] El documento US 6.52.55 revela un método y aparato para determinar el rumbo geográfico de un cuerpo, y un método para determinar una orientación de un cuerpo. El método incluye las fases de medir una aceleración del cuerpo en una primera dirección, medir una aceleración del cuerpo en una segunda dirección diferente de la primera dirección, definiendo la primera dirección y la segunda dirección un plano, medir una aceleración perpendicular al plano en un sistema de coordenadas que gira sobre un eje perpendicular al plano e Inferir la orientación del cuerpo a partir de las tres mediciones.
[8] El documento US 6.621.46 revela dispositivos de alineación de instrumentos y métodos para determinar el rumbo de referencia de alineación óptica del instrumento. El aparato comprende un instrumento que tiene una referencia de alineación óptica, un posicionador de elevación para posicionar la elevación de la referencia de alineación óptica del instrumento que tiene un eje de elevación, un posicionador de azimut para posicionar el azimut de la referencia de alineación óptica del instrumento que tiene un eje de azimut y un sensor que incluye un giroscopio que tiene un eje sensible. El método comprende registrar una primera salida de un giroscopio de un posicionador de azimut que tiene un rumbo de azimut de la referencia de alineación óptica del instrumento en una primera posición, girar el posicionar de azimut a una segunda posición, registrar una segunda salida del giroscopio y girar el posicionador de azimut a una tercera posición, registrar una tercera salida del giroscopio y determinar el rumbo de azimut relativo al norte geográfico a partir de la primera, segunda y tercera salida.
[9] El documento US 7.412.775 revela un sistema buscador del norte de giroscopio y método que incluye un sistema sensor y método para determinar una dirección relativa al norte geográfico. El sistema comprende al menos un sensor de velocidad angular, como un sensor MEMS, que tiene un eje de entrada y un eje de rotación. El sensor comprende una estructura de accionamiento de motor, una salida de señal del motor desde la estructura de accionamiento de motor, un giroscopio, y una salida de velocidad del sensor a partir del giroscopio para una señal de velocidad del sensor. Un divisor de frecuencia está en comunicación operativa con la salida de señal del motor, y... [Seguir leyendo]
Reivindicaciones:
1. Una carga útil (2) que incluye un ensamblaje de suspensión cardán (23) y ensamblaje de giroscopio asociado (21), comprendiendo un control de ensamblaje de giroscopio (22) asociado a dicho ensamblaje de giroscopio (21) y operable para activar el ensamblaje de giroscopio (21) para obtener mediciones de desviación (24) en el plano de azimut y plano de elevación y procesar las mediciones en un primer intervalo dinámico que corresponde a un primer intervalo de velocidad de rotación, para estabilizar la carga útil utilizando dicho ensamblaje de suspensión cardán (23); caracterizado porque el control del ensamblaje de giroscopio (22) es operable para activar el ensamblaje de giroscopio (21) para obtener mediciones instantáneas de un girómetro de elevación (15) y procesar las mediciones en un segundo intervalo dinámico que corresponde a un segundo intervalo de velocidad de rotación que tiene más sensibilidad que dicho primer intervalo dinámico, para encontrar la desviación de la carga útil del norte de la Tierra.
2. La carga útil según la reivindicación 1, donde dicho ensamblaje de giroscopio (21) incluye un girómetro azimutal (14) dispuesto perpendicularmente al girómetro de elevación (15); dicho control de ensamblaje de giroscopio (22) siendo operable para accionar dicho girómetro de elevación (15) para girar sobre el eje azimutal para obtener y registrar mediciones instantáneas durante al menos una rotación de 36°; dicho control del ensamblaje de giroscopio (22) siendo operable además para derivar un ángulo de deriva representativo de dicha desviación del norte basándose en dichas mediciones registradas.
3. La carga útil según la reivindicación 2, donde dicho control de ensamblaje de giroscopio (22) se configura para calcular una onda senoidal que está adaptada a dichas mediciones y deriva dicho ángulo de deriva de dicha onda senoidal.
4. La carga útil según la reivindicación 2 o 3, donde cuanto mayor es la duración t de dicha rotación sobre dicho eje azimutal, menores el error de dichas mediciones.
5. La carga útil según cualquiera de las reivindicaciones de la 2 a la 4, donde dichas mediciones resultan en:
Mediciones = £2*cos ((p)* COS (a) ,
donde Q corresponde a la velocidad de rotación de la tierra qp corresponde a la latitud
a corresponde al ángulo de deriva que cambia según las mediciones instantáneas del girómetro de elevación (15) durante al menos la rotación de 36°,
y donde dicha desviación es un desplazamiento de fase a de la onda senoidal que se adapta a las mediciones.
6. La carga útil según cualquiera de las reivindicaciones precedentes, comprendiendo además un sensor de inclinación para percibir mediciones de inclinación de la carga útil en ambos o cualquiera de los ejes de balanceo y cabeceo, y donde dicho control de ensamblaje de giroscopio (22) se configura para calcular los comandos de compensación para la transmisión a dicho ensamblaje de suspensión cardán (23) para reducir o eliminar dichas mediciones de inclinación, a través de lo cual se nivela dicha carga útil.
7. La carga útil según cualquiera de las reivindicaciones precedentes, donde dicha carga útil se monta sobre una plataforma móvil que está sometida a desviaciones de orientación espacial en cualquiera o ambos del plano de azimut o plano de elevación, y donde dichas desviaciones espaciales se miden mediante dicho ensamblaje de giroscopio (21) y donde dichas mediciones son procesadas por dicho control de ensamblaje de giroscopio (22) para obtener comandos de compensación para activar el ensamblaje de suspensión cardán (23) para compensar dichas desviaciones espaciales y estabilizar la carga útil.
8. La carga útil según cualquiera de las reivindicaciones de la 2 a la 6, donde dicha carga útil se monta sobre una plataforma móvil que está sometida a desviaciones de orientación espacial en cualquiera o ambos del plano de azimut o plano de elevación, y donde dichas desviaciones espaciales en el plano de azimut se miden mediante dicho girómetro azimutal (14) independientemente de dicha rotación de 36° y donde dichas desviaciones espaciales en dicho plano de elevación se miden mediante dicho girómetro de elevación (15) independientemente de dicha rotación de 36° y donde dichas mediciones son procesadas mediante dicho control de ensamblaje de giroscopio (22) para obtener los datos para activar el ensamblaje de suspensión cardán para compensar dichas desviaciones y estabilizar la carga útil.
9. La carga útil según cualquiera de las reivindicaciones precedentes, donde dicha sensibilidad depende de la velocidad de rotación de los giroscopios en el modo de operación de estabilización.
1. La carga útil según la reivindicación 9, donde la velocidad de rotación es 1[°/s],
11. La carga útil según cualquiera de las reivindicaciones precedentes, donde dicha sensibilidad depende de un 5 parámetro de compensación.
12. La carga útil según la reivindicación 11, donde dicho parámetro de compensación es 5%.
13. Un método para la utilización bimodal de una carga útil que incluye un ensamblaje de suspensión cardán (23) y asociado un ensamblaje de giroscopio (21), comprendiendo:
(i) activar el ensamblaje de giroscopio para obtener mediciones de desviación en el plano de azimut y
plano de elevación y procesar las mediciones en un primer intervalo dinámico que corresponde a un
primer intervalo de velocidad de rotación, para estabilizar la carga útil utilizando dicho ensamblaje de suspensión cardán; y caracterizado por
(ii) activar el ensamblaje de giroscopio para obtener mediciones instantáneas de un girómetro de elevación y procesar las mediciones en un segundo intervalo dinámico que corresponde a un segundo
intervalo de velocidad de rotación que tiene más sensibilidad que dicho primer intervalo dinámico, para
encontrar la desviación de la carga útil del norte de la Tierra.
Patentes similares o relacionadas:
Sistema de armas por control remoto, del 11 de Noviembre de 2019, de ESCRIBANO MECHANICAL& ENGINEERING, S.L: Sistema de armas por control remoto. El sistema de la invención añade un eje de estabilización adicional frente a los sistemas convencionales. […]
Unidad de medición inercial de aeronave no tripulada, del 21 de Diciembre de 2018, de SZ DJI Technology Co., Ltd: Una unidad de medición de inercia para una aeronave no tripulada, que comprende un conjunto de alojamiento, un conjunto de detección y un amortiguador […]
Plataforma estabilizada, del 20 de Septiembre de 2017, de THALES: Plataforma estabilizada que comprende: - un marco de soporte ; - una estructura portante , montada rotatoria en relación con el […]
Procedimiento y aparato para la estabilización de cargas útiles, incluyendo cámaras aéreas, del 3 de Octubre de 2012, de THE INSITU GROUP: Aparato aéreo de vigilancia , que comprende: una cámara que tiene una apertura de cámara configurada para recibir radiación […]
 PLATAFORMA PARA LA TOMA DE IMÁGENES AÉREAS, del 8 de Marzo de 2012, de UNIVERSIDAD DE SALAMANCA: Plataforma para la toma de imágenes aéreas.
Fabricada en fibra de carbono, permite la toma de imágenes aéreas a baja altura y escala grande con bajo coste. […]
PLATAFORMA PARA LA TOMA DE IMÁGENES AÉREAS, del 8 de Marzo de 2012, de UNIVERSIDAD DE SALAMANCA: Plataforma para la toma de imágenes aéreas.
Fabricada en fibra de carbono, permite la toma de imágenes aéreas a baja altura y escala grande con bajo coste. […]
ALINEACION Y ESTABILIZACION AUTOMATICA DE ELEMENTOS ELECTRO-OPTICOS., del 1 de Febrero de 2003, de RATHEON COMPANY: Aparato óptico para utilizar en la auto- alineación de trayectorias ópticas de línea de mira de al menos un sensor y un láser […]
 SISTEMA Y PROCEDIMIENTO DE ESTABILIZACION DE UNA LINEA DE MIRA, del 11 de Octubre de 2010, de SAGEM DEFENSE SECURITE SA: Sistema de estabilización afinada de una línea de mira de un dispositivo optrónico , que comprende:
- unos medios de medición apropiados para medir una […]
SISTEMA Y PROCEDIMIENTO DE ESTABILIZACION DE UNA LINEA DE MIRA, del 11 de Octubre de 2010, de SAGEM DEFENSE SECURITE SA: Sistema de estabilización afinada de una línea de mira de un dispositivo optrónico , que comprende:
- unos medios de medición apropiados para medir una […]
 DISPOSITIVO DE PREDICCION DE MOVIMIENTOS DE BARCOS, del 16 de Mayo de 2008, de BAE SYSTEMS (COMBAT AND RADAR SYSTEMS) LIMITED: Un procedimiento de predicción de una orientación de una embarcación, comprendiendo dicho procedimiento las etapas de: introducir datos de balance que describen un balance […]
DISPOSITIVO DE PREDICCION DE MOVIMIENTOS DE BARCOS, del 16 de Mayo de 2008, de BAE SYSTEMS (COMBAT AND RADAR SYSTEMS) LIMITED: Un procedimiento de predicción de una orientación de una embarcación, comprendiendo dicho procedimiento las etapas de: introducir datos de balance que describen un balance […]