Un dispositivo para mover y colocar un elemento en el espacio.
Un positivo (1) para mover y colocar un elemento en el espacio,
que comprende:
un elemento móvil (2);
un primer elemento (3), firmemente restringido a un bastidor (32) del dispositivo (1) y un segundo elemento (4) firmemente restringido al bastidor (32) del dispositivo (1);
un primer carro (5) deslizable a lo largo del primer elemento (3);
un segundo carro (6) deslizable a lo largo del segundo elemento (4);
un primer par de brazos (7, 8) que comprende un primer brazo (7) y un segundo brazo (8), el primer brazo (7) y el segundo brazo (8) estando articulados, en un extremo de los mismos, al primer carro (5) y, en otro extremo de los mismos, al elemento móvil (2), el primer par de brazos (7, 8), el primer carro (5) y el elemento móvil (2) determinando un primer mecanismo articulado de cuatro barras (9);
un segundo par de brazos (10, 11) que comprende un tercer brazo (10) y un cuarto brazo (11), el tercer brazo (10) y el cuarto brazo (11) estando articulados, en un extremo de los mismos, al segundo carro (6) y, en otro extremo de los mismos, al elemento móvil (2), el segundo par de brazos (10, 11), el segundo carro (6) y el elemento móvil (2) determinando un segundo mecanismo articulado de cuatro barras (12);
un tercer elemento (13);
un tercer par de brazos (14, 15) que comprende un quinto brazo (14) y un sexto brazo (15), el quinto brazo (14) y el sexto brazo (15) estando articulados, en un extremo de los mismos, al tercer elemento (13) y, en otro extremo de los mismos, al elemento móvil (2), el tercer par de brazos (114, 15), el tercer elemento (13) y el elemento móvil (2) determinando un tercer mecanismo articulado de cuatro barras (16);
caracterizado porque adicionalmente comprende:
un cuarto elemento (17) el cual está articulado al bastidor (3, 4, 19, 32) del dispositivo (1) y el cual soporta de forma giratoria el tercer elemento (13);
un primer accionamiento (18) para mover el cuarto elemento (17).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12163553.
Solicitante: MARCHESINI GROUP S.P.A..
Inventor/es: MONTI, GIUSEPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
PDF original: ES-2498947_T3.pdf
Fragmento de la descripción:
Un dispositivo para mover y colocar un elemento en el espacio CAMPO DE LA INVENCIÓN
La presente invención se refiere al sector técnico de los dispositivos para mover y colocar un elemento en un espacio tridimensional; en particular, la invención se refiere a un robot paralelo según el preámbulo de la reivindicación 1. Un robot de este tipo desconocido a partir del documento US-A-2002 015 624.
DESCRIPCIÓN DE LA TÉCNICA ANTERIOR
Los robots paralelos también son conocidos como manipuladores paralelos.
Un robot paralelo comprende un bastidor y una plataforma móvil conectada al bastidor por medio de un cierto número de mecanismos articulados de barras; estos mecanismos son movidos por accionamientos, por ejemplo motores eléctricos, montados en el bastidor.
La plataforma móvil de este modo se puede mover en el espacio tridimensional dentro de un volumen de trabajo previamente determinado, manteniendo generalmente la misma orientación todo el tiempo (por ejemplo horizontal).
El robot paralelo también comprende un cabezal de funcionamiento para la manipulación de productos (por ejemplo, farmacéuticos o cosméticos) soportados por la plataforma móvil, para funcionar interiormente en el volumen de trabajo. Adicionalmente, el cabezal de funcionamiento puede modificar su orientación con respecto a la plataforma móvil gracias al movimiento recibido a partir de por lo menos un accionamiento adicional montado en el bastidor del robot.
Un ejemplo de un robot paralelo del tipo anteriormente mencionado se revela en el documento US 4,976,582.
El robot paralelo conocido a partir del documento US-A-2002 015 624 comprende: una plataforma móvil; un primer montante, un segundo montante y un tercer montante instalados como los vértices de un triángulo equilátero; un primer carro deslizante a lo largo del primer montante, un segundo cargo deslizante a lo largo del segundo montante y un tercer carro deslizante a lo largo del tercer montante último; un primer par de brazos que comprende un primer brazo y un segundo brazo, el primer brazo y el segundo brazo estando articulados en un extremo relativo de los mismos al primer carro y, en el otro extremo a la plataforma móvil, el primer par de brazos, el primer carro y la plataforma móvil determinando un primer mecanismo articulado de barras; un segundo par de brazos que comprende un tercer brazo y un cuarto brazo, el tercer brazo y el cuarto brazo estando articulados en un extremo relativo de los mismos al segundo carro y, en el otro extremo, a la plataforma móvil; el segundo par de brazos, el segundo carro y la plataforma móvil determinando un segundo mecanismo articulado de barras y un tercer par de brazos que comprende un quinto brazo y un sexto brazo, el quinto brazo y el sexto brazo estando articulados en un extremo relativo de los mismos al tercer carro y en el otro extremo a la plataforma móvil, el tercer par de brazos, el tercer carro y la plataforma móvil determinando un tercer mecanismo articulado de barras; un primer motor eléctrico el cual mueve el primer carro; un segundo motor eléctrico el cual mueve el segundo carro y un tercer motor eléctrico el cual mueve el tercer carro.
De este modo, la plataforma móvil se puede mover en un volumen de trabajo previamente determinado, por ejemplo mientras mantiene una orientación que es constantemente horizontal.
El robot paralelo también comprende: un cabezal de funcionamiento para la manipulación de productos que están colocados en el volumen de trabajo y un cuarto motor montado en el primer carro; un primer brazo adicional el cual transmite el movimiento del árbol de salida giratorio del cuarto motor al cabezal de funcionamiento por medio de dos juntas universales instaladas en el extremo del primer brazo adicional; un quinto motor montado en el segundo carro, un segundo brazo adicional el cual transmite el movimiento del árbol de salida giratorio del quinto motor al cabezal de funcionamiento por medio de dos juntas universales instaladas en los extremos del segundo brazo adicional; un sexto motor montado en el tercer carro; un tercer brazo adicional el cual transmite el movimiento del árbol de salida giratorio del sexto motor al cabezal de funcionamiento por medio de dos juntas universales instaladas en los extremos del tercer brazo adicional.
De este modo, el cabezal de funcionamiento tiene seis grados de libertad, ya que puede funcionar interiormente en el volumen de trabajo citado antes en este documento.
Una desventaja de este robot paralelo consiste en el hecho de que la instalación de los tres montantes plantea problemas de visibilidad del volumen de trabajo así como accesibilidad al mismo.
RESUMEN DE LA INVENCIÓN
El objetivo de la presente Invención consiste en evitar la desventaja anteriormente descrita.
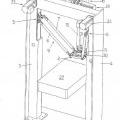
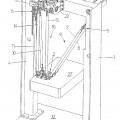
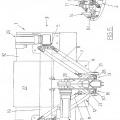
El objetivo establecido se logra mediante un robot paralelo como se define en la reivindicación 1, que comprende: un elemento móvil; un primer elemento, firmemente restringido a un bastidor del dispositivo (1) y un segundo elemento firmemente restringido al bastidor del dispositivo; un primer carro deslizable a lo largo del primer elemento; un segundo carro deslizable a lo largo del segundo elemento; un primer par de brazos que comprende un primer brazo y un segundo brazo, el primer brazo y el segundo brazo estando articulados, en un extremo de los mismos, al primer carro y, en otro extremo de los mismos, al elemento móvil, el primer par de brazos, el primer carro y el elemento móvil determinando un primer mecanismo articulado de cuatro barras; un segundo par de brazos que comprende un tercer brazo y un cuarto brazo, el tercer brazo y el cuarto brazo estando articulados, en un extremo de los mismos, al segundo carro y, en otro extremo de los mismos, al elemento móvil, el segundo par de brazos, el segundo carro y el elemento móvil determinando un segundo mecanismo articulado de cuatro barras; un tercer elemento; un tercer par de brazos que comprende un quinto brazo y un sexto brazo, el quinto brazo y el sexto brazo estando articulados, en un extremo de los mismos, al tercer elemento y, en otro extremo de los mismos, al elemento móvil, el tercer par de brazos, el tercer elemento y el elemento móvil determinando un tercer mecanismo articulado de cuatro barras; caracterizado porque adicionalmente comprende: un cuarto elemento el cual está articulado al bastidor del dispositivo y el cual soporta de forma giratoria el tercer elemento; un primer accionamiento para mover el cuarto elemento.
Con referencia al ejemplo de la técnica anterior citado antes en este documento, el tercer elemento puede estar identificado en el tercer carro el cual desliza a lo largo del tercer montante de tal modo que mueve el tercer mecanismo articulado de barras.
En la invención, el tercer elemento está soportado de forma giratoria por el cuarto elemento, el cual está articulado al bastidor y se puede activar mediante el primer accionamiento.
Es ventajoso que deje de ser necesario tener un tercer montante y un tercer carro que deslice a lo largo del mismo: por esta razón, la falta del tercer montante mejora la visibilidad y la accesibilidad al volumen de trabajo.
El primer elemento preferiblemente es un primer montante y el segundo elemento es un segundo montante.
El dispositivo preferiblemente comprende un travesaño fijado al primer montante y al segundo montante, travesaño el cual soporta de forma giratoria el cuarto elemento. El bastidor del dispositivo de este modo puede comprender una conformación de portal, lo cual optimiza la visibilidad y la accesibilidad del volumen de carga.
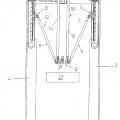
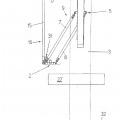
Según una forma de realización, el dispositivo comprende un noveno brazo y un segundo accionamiento, el noveno brazo estando articulado al bastidor y al segundo accionamiento, el segundo accionamiento estado articulado al noveno brazo y al cuarto elemento, el segundo accionamiento, el noveno brazo, el cuarto elemento y el bastidor determinando un cuarto mecanismo articulado de barras.
El noveno brazo y el cuarto elemento están en particular articulados a la pieza fija, o bastidor, del segundo accionamiento.
Como es conocido, un mecanismo articulado de cuatro barras comprende cuatro lados vinculados unos a otros, cada lado siendo de idéntica longitud al lado opuesto, en cualquier posición que pueda ser adoptada por el mecanismo articulado de barras, los lados opuestos permanecen constantemente paralelos unos a otros.
En la forma de realización anteriormente mencionada, los lados del cuarto mecanismo articulado de barras pueden ser considerados como las líneas de unión de sus puntos de articulación; por tanto, un primer lado está asociado al cuarto elemento, un segundo lado, opuesto al primero, está asociado al noveno brazo, un tercer... [Seguir leyendo]
Reivindicaciones:
1. Un positivo (1) para mover y colocar un elemento en el espacio, que comprende: un elemento móvil (2);
un primer elemento (3), firmemente restringido a un bastidor (32) del dispositivo (1) y un segundo elemento (4) firmemente restringido al bastidor (32) del dispositivo (1); un primer carro (5) deslizable a lo largo del primer elemento (3); un segundo carro (6) deslizable a lo largo del segundo elemento (4);
un primer par de brazos (7, 8) que comprende un primer brazo (7) y un segundo brazo (8), el primer brazo (7) y el segundo brazo (8) estando articulados, en un extremo de los mismos, al primer carro (5) y, en otro extremo de los mismos, al elemento móvil (2), el primer par de brazos (7, 8), el primer carro (5) y el elemento móvil (2) determinando un primer mecanismo articulado de cuatro barras (9);
un segundo par de brazos (10, 11) que comprende un tercer brazo (10) y un cuarto brazo (11), el tercer brazo (10) y el cuarto brazo (11) estando articulados, en un extremo de los mismos, al segundo carro (6) y, en otro extremo de los mismos, al elemento móvil (2), el segundo par de brazos (10, 11), el segundo carro (6) y el elemento móvil (2) determinando un segundo mecanismo articulado de cuatro barras (12); un tercer elemento (13);
un tercer par de brazos (14, 15) que comprende un quinto brazo (14) y un sexto brazo (15), el quinto brazo (14) y el sexto brazo (15) estando articulados, en un extremo de los mismos, al tercer elemento (13) y, en otro extremo de los mismos, al elemento móvil (2), el tercer par de brazos (114, 15), el tercer elemento (13) y el elemento móvil (2) determinando un tercer mecanismo articulado de cuatro barras (16); caracterizado porque adicionalmente comprende:
un cuarto elemento (17) el cual está articulado al bastidor (3, 4, 19, 32) del dispositivo (1) y el cual soporta de forma giratoria el tercer elemento (13);
un primer accionamiento (18) para mover el cuarto elemento (17).
2. El dispositivo (1) de la reivindicación anterior en el que el primer elemento (3) comprende un primer montante (3) y en el que el segundo elemento (4) comprende un segundo montante (4).
3. El dispositivo (1) de la reivindicación anterior que comprende un travesaño (19) fijado al primer montante (3) y al segundo montante (4), travesaño (19) el cual soporta de forma giratoria el cuarto elemento (17).
4. El dispositivo (1) de la reivindicación anterior en el que el primer accionamiento (18) está montado en el travesaño (19).
5. El dispositivo (1) de cualquiera de las reivindicaciones anteriores en el que el tercer elemento (13) comprende un séptimo brazo (13) articulado al tercer par de brazos (14, 15), y en el que el cuarto elemento (17) comprende un octavo brazo (17) provisto de una horquilla (20), dientes (21) de la horquilla (20) estando articulados al séptimo brazo (13).
6. El dispositivo (1) de cualquiera de las reivindicaciones anteriores en el que el primer accionamiento (18) es un motor eléctrico.
7. El dispositivo (1) de cualquiera de las reivindicaciones anteriores que comprende un noveno brazo (28) y un segundo accionamiento (29), el noveno brazo (28) estando articulado al bastidor (3, 4, 19, 32) del dispositivo (1) y al segundo accionamiento (29), el segundo accionamiento (29) estado articulado al noveno brazo (28) y al cuarto elemento (17), el segundo accionamiento (29), el noveno brazo (28), el cuarto elemento (17) y el bastidor (3, 4, 19, 32) del dispositivo (1) determinando un cuarto mecanismo articulado de barras (33).
8. El dispositivo (1) de la reivindicación anterior en el que la línea que une conjuntamente el punto de articulación del segundo accionamiento (29) con el noveno brazo (28) y el punto de articulación del segundo accionamiento (29) con el cuarto elemento (17) es vertical.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]