Procedimiento de planificación de una trayectoria.
Un procedimiento de planificación de una trayectoria de una región geográfica dada en el que la trayectoria se planifica desde un primer nodo hasta un segundo nodo en una representación digital de la región geográfica,
caracterizado por:
i) seleccionar una trayectoria desde el primer nodo hasta el segundo nodo;
ii) determinar la exposición a amenazas para un vehículo que se desplace en una trayectoria desde el primer nodo hasta el segundo nodo;
iii) evaluar el rendimiento de los sistemas de navegación del vehículo para el vehículo que se desplaza a lo largo de la trayectoria;
iv) estimar una tasa de supervivencia basada en la exposición a amenazas determinada y en el rendimiento evaluado de los sistemas de navegación del vehículo a lo largo de la trayectoria;
v) repetir las etapas i)-iv) hasta que se seleccione una trayectoria con la mejor tasa de supervivencia.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03078219.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: LUNDBERG,KRISTIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01C21/34 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Búsqueda de rutas; guiado en ruta.
- G06G7/78 G […] › G06 CALCULO; CONTEO. › G06G COMPUTADORES ANALOGICOS (dispositivos de cálculo óptico analógico G06E 3/00; sistemas de computadores basados en modelos de cálculo específicos G06N). › G06G 7/00 Dispositivos en los que la operación de cálculo es efectuada haciendo variar valores eléctricos o magnéticos (redes neuronales para el tratamiento de datos de imagen G06T; análisis o síntesis de la voz G10L). › para la radiogoniometría, para la localización, para la medida de la distancia o de la velocidad para de sistemas de navegación.
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
PDF original: ES-2514441_T3.pdf
Fragmento de la descripción:
Procedimiento de planificación de una trayectoria Campo técnico
La presente invención versa sobre un procedimiento de planificación de una trayectoria para una exposición mínima a amenazas en una región geográfica dada.
Antecedentes de la invención
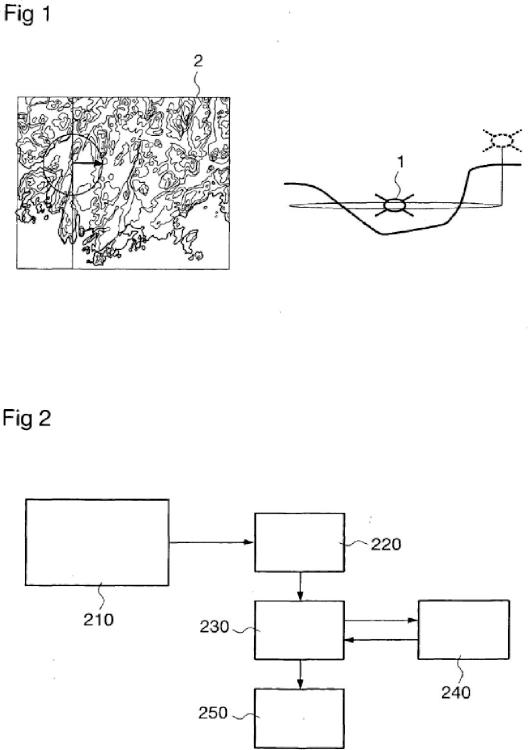
La planificación táctica de misiones para vehículos aéreos, por ejemplo los VANT o robots, en la que las misiones se llevan a cabo en blancos terrestres, es una tarea muy compleja. Cualquier desviación de la navegación a lo largo de una línea recta entre dos ubicaciones puede causar una desviación táctica, así como una desviación en el rendimiento de la navegación. Cuando se fija el itinerario de una trayectoria para una operación encubierta, es deseable fijar el itinerario de los recorridos de modo que se logre el máximo enmascaramiento topográfico. En particular, es deseable evitar las zonas muy visibles, como las cimas de cordilleras y amplios espacios abiertos. Sin embargo, una planificación ventajosa de rutas desde el punto de vista del terreno puede provocar una desventaja táctica debida, por ejemplo, a la exposición a amenazas o una desventaja debida al rendimiento de los sistemas de navegación.
Los datos digitales de elevación del terreno (DTED) son una representación digital de la topografía de una región geográfica. Los DTED pueden ser producidos a partir de fotografías tomadas por satélites u otros medios y pueden incluir datos digitales que representen altitudes y el tipo de terreno. Preferentemente, los datos se representan en una cuadrícula con igual separación entre los nodos.
Según la técnica anterior, se conoce la fijación del itinerario de recorridos de vuelos encubiertos usando DTED, de modo que el recorrido del vuelo esté siempre en la zona local más baja. Este procedimiento de fijación del itinerario se basa en la suposición de que el mejor enmascaramiento topográfico estará siempre en la elevación local más baja. Sin embargo, esta suposición no siempre es verdad y, por ello, el procedimiento de la técnica anterior con frecuencia tiene como resultado una fijación de itinerarios de recorridos de vuelos que no llega a ser óptima. Una desventaja significativa de este procedimiento de la técnica anterior es también que no interrelaciona el rendimiento táctico con el rendimiento del sistema de navegación.
La navegación del terreno, en la que se predice la posición real de un vehículo a partir de información del terreno disponible en el entorno presente y precedente, está convirtiéndose de forma creciente en una función integrada en los sistemas de navegación de vehículos. Esto aumenta la posibilidad de planificación de una trayectoria en un entorno alterado en el que no hay GPS disponible y para replanificar trayectorias durante una misión. Sin embargo, la replanificación de una trayectoria durante una misión no solo implica la replanificación desde un punto de vista de la navegación, sino también desde un punto de vista táctico. Los procedimientos conocidos de planificación de trayectorias no abordan satisfactoriamente este asunto.
El documento US 5 504 686 da a conocer un procedimiento de fijación del itinerario de un vuelo encubierto. El procedimiento divulgado implica la fijación del itinerario de un recorrido de vuelo encubierto a partir de datos digitales de elevación de terreno de una región geográfica. Se forma una superficie de costes a partir de una combinación ponderada de capacidad de ocultación y de vuelo en la zona dada. Se fija el itinerario del recorrido del vuelo en las zonas de la superficie de costes que son, a la vez, susceptibles de ocultación y de vuelo. Sin embargo, este procedimiento no tiene en cuenta el rendimiento del sistema de navegación en el cálculo de la ruta.
Por ello, la técnica anterior incluye diversas soluciones de planificación de trayectorias en función de datos del terreno. Sin embargo, no implican la funcionalidad completa del sistema de navegación en el problema de la optimización. Pueden incluir mapas para navegación del terreno, pero solo para mostrar una imagen estática de dónde se considera que la capacidad de vuelo en el terreno es baja, y no para integrar dinámicamente el rendimiento de la navegación ni el rendimiento táctico en la optimización de la trayectoria. Por lo tanto, las trayectorias logradas mediante los sistemas de planificación de la técnica anterior distan de estar optimizadas.
Sumario de la invención
Por lo tanto, el objeto de la presente invención es proporcionar una solución que palie las desventajas de la técnica anterior descritas más arriba.
Según un aspecto de la invención, estos objetos se logran por medio del procedimiento de planificación de una trayectoria en una región geográfica dada, en el que la trayectoria se planifica desde un primer nodo hasta un segundo nodo en una representación digital de la región geográfica. Se determina la exposición a amenazas para un vehículo que se desplace en una trayectoria desde el primer nodo hasta el segundo nodo. Se evalúa el rendimiento de los sistemas de navegación del vehículo que se desplaza por la trayectoria. Se estima una tasa de supervivencia basada en la exposición a amenazas determinada y en el rendimiento evaluado de los sistemas de navegación del
vehículo. Se planifica una nueva trayectoria desde el primer nodo hasta el segundo nodo hasta que se establece una trayectoria con la mejor tasa de supervivencia.
Por ello, la invención ofrece la ventaja con respecto a soluciones anteriores de tomar en consideración el rendimiento real de los sistemas de navegación de los vehículos cuando se evalúa la tasa de supervivencia.
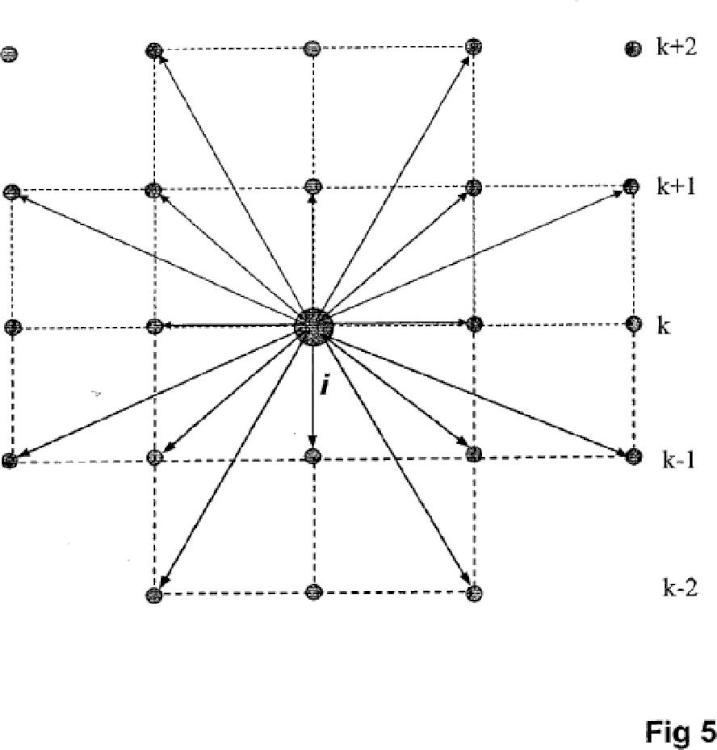
Según una realización específica de la invención, el procedimiento de planificación de una trayectoria se lleva a cabo nodo por nodo. Se establece como nodo de inicio el primer nodo que tiene una tasa dada de supervivencia. Se selecciona un conjunto de nodos adyacentes en la representación digital. Se estiman la exposición a amenazas y el rendimiento de navegación de un vehículo que se desplace desde el nodo de inicio hasta cada nodo del conjunto de nodos adyacentes. Se estima una tasa de supervivencia para cada nodo del conjunto de nodos adyacentes basada en la tasa dada de supervivencia en el nodo de inicio y en la contribución de la exposición a amenazas y en el rendimiento de la navegación cuando se desplaza del nodo de inicio al nodo adyacente. Se lleva a cabo entonces la misma evaluación de la tasa de supervivencia para un nuevo conjunto de nodos de inicio, correspondiente el conjunto de nodos de inicio al conjunto anterior de nodos adyacentes. Se repite esta evaluación hasta que se ha establecido la tasa de supervivencia para todos los nodos en una multitud de trayectorias desde un primer hasta un segundo nodo. Cuando se ha establecido la mejor tasa de supervivencia para una trayectoria desde el primer nodo hasta el segundo, se escoge esta trayectoria como trayectoria preferente.
Según una realización preferente de la invención, el procedimiento de planificación de una trayectoria incluye formar un mapa de optimización del terreno indicativo de la exposición a amenazas en la región geográfica dada, y formar un mapa de navegación indicativo del rendimiento de navegación del vehículo mientras se desplaza en la región. Cada mapa se basa en una representación digital de la región geográfica con una estructura de cuadrículas con valores establecidos asignados a cada nodo en la estructura de cuadrículas. Los valores establecidos de cada nodo en el mapa de optimización del terreno y en el mapa de navegación se usan para estimar la mejor tasa de supervivencia.
Según otra realización preferente de la invención, el procedimiento de planificación de la trayectoria incluye planificar un recorrido minimizando la exposición a amenazas desde un primer nodo hasta un segundo nodo en el mapa de optimización del terreno. Se evalúa el rendimiento de la navegación a lo largo del recorrido desde el primer nodo hasta el segundo nodo en el mapa de navegación. Se ajusta la exposición a amenazas en el mapa de optimización del terreno con respecto al impacto del rendimiento de la navegación a lo largo del recorrido. Se estima una tasa de supervivencia para el recorrido, tras lo cual se selecciona un nuevo recorrido. Se repiten las etapas hasta que se selecciona un recorrido con la mejor tasa de supervivencia. Se planifica una trayectoria como una multitud de recorridos interconectados desde el primer nodo hasta el segundo nodo, seleccionándose la trayectoria como el conjunto de recorridos interconectados que proporciona la mejor tasa de supervivencia.
La invención también incluye un programa de ordenador directamente cargable en le memoria interna... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de planificación de una trayectoria de una región geográfica dada en el que la trayectoria se planifica desde un primer nodo hasta un segundo nodo en una representación digital de la región geográfica, caracterizado por:
i) seleccionar una trayectoria desde el primer nodo hasta el segundo nodo;
ii) determinar la exposición a amenazas para un vehículo que se desplace en una trayectoria desde el primer nodo hasta el segundo nodo;
iii) evaluar el rendimiento de los sistemas de navegación del vehículo para el vehículo que se desplaza a lo largo de la trayectoria;
iv) estimar una tasa de supervivencia basada en la exposición a amenazas determinada y en el rendimiento evaluado de los sistemas de navegación del vehículo a lo largo de la trayectoria;
v) repetir las etapas i)-iv) hasta que se seleccione una trayectoria con la mejor tasa de supervivencia.
2. Un procedimiento de planificación de una trayectoria según la reivindicación caracterizado, además, por:
i) establecer el primer nodo como nodo de inicio con una tasa dada de supervivencia;
ii) seleccionar un nodo adyacente en la representación digital;
iii) determinar la exposición a amenazas para un vehículo que se desplace desde el nodo de inicio actual hasta el nodo adyacente en la representación digital;
iv) evaluar el rendimiento de la navegación del vehículo que se desplaza desde el nodo de inicio hasta el nodo adyacente;
v) estimar una tasa de supervivencia para el nodo adyacente basada en la tasa dada de supervivencia en el nodo de inicio, en la exposición a amenazas y en el rendimiento de la navegación;
vi) repetir las etapas ii)-v) hasta que se haya establecido una tasa de supervivencia para un conjunto predeterminado de nodos adyacentes;
vii) seleccionar un nodo de inicio del conjunto de nodos adyacentes y repetir las etapas ii)-vi) hasta que cada nodo del conjunto predeterminado de nodos adyacentes haya sido evaluado como nodo de inicio;
viii) repetir las etapas ii)-vii) hasta que se haya establecido la mejor tasa de supervivencia para la trayectoria desde el primer nodo hasta el segundo nodo.
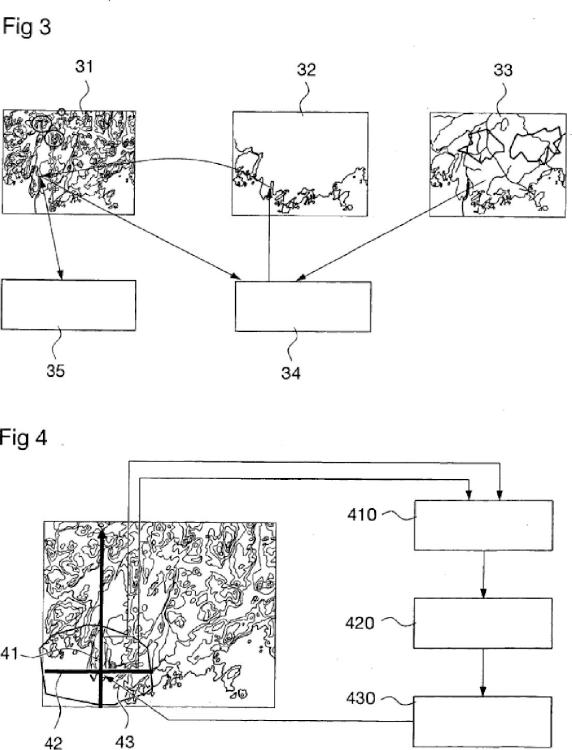
3. Un procedimiento según las reivindicaciones 1 o 2 caracterizado, además, por formar un mapa (31) de optimización del terreno que describa la exposición a amenazas en la región y un mapa (33) de navegación que describa el rendimiento de navegación del vehículo que se desplaza en la región, en el que cada mapa está basado en la representación digital de la región geográfica con una respectiva estructura de cuadrículas con valores establecidos asignados a cada nodo en la estructura de cuadrículas y basándose la estimación de la tasa de supervivencia en los valores establecidos en el mapa de optimización del terreno y en el mapa de navegación.
4. Un procedimiento según la reivindicación 3 en el que los valores establecidos asignados a los nodos en el mapa (31) de optimización del terreno representan la exposición del vehículo a amenazas en el nodo.
5. Un procedimiento según la reivindicación 3 en el que los valores establecidos asignados a los nodos en el mapa (33) de navegación representan una medición del terreno indicativa del rendimiento de la navegación.
6. Un procedimiento según cualquiera de las reivindicaciones 3-5 en el que se forma un mapa (32) de desviación que es indicativo de una mayor exposición a amenazas con un mayor error de navegación, mapa de desviación que es una estructura multidimensional de cuadrículas basada en la representación digital de la región geográfica.
7. Un procedimiento según cualquiera de las reivindicaciones precedentes en el que el procedimiento incluye, además, las etapas de:
i) planificar un recorrido minimizando la exposición a amenazas desde un primer nodo hasta un segundo nodo en el mapa (31) de optimización del terreno;
¡i) evaluar el rendimiento de la navegación en un correspondiente recorrido desde un primer nodo hasta un segundo nodo en el mapa (33) de navegación;
iii) ajustar la exposición a amenazas en el mapa (31) de optimización del terreno con respecto al impacto del rendimiento de la navegación cuando se desplaza desde el primer nodo al segundo;
iv) estimar una tasa de supervivencia para el recorrido;
v) repetir la etapa (i) hasta que se haya establecido un recorrido con la mejor tasa de supervivencia; y
vi) planificar una trayectoria como una multitud de recorridos interconectados, estableciéndose la tasa de supervivencia para cada conjunto de recorridos interconectados formando una trayectoria desde el primer nodo hasta el segundo nodo, y escogiéndose la trayectoria como el conjunto de recorridos interconectados que proporciona la mejor tasa de supervivencia.
8. Un programa de ordenador directamente cargable en le memoria interna de un ordenador, que comprende un soporte lógico que, cuando está cargado en la memoria interna, hace que el ordenador lleve a cabo el procedimiento según cualquiera de las reivindicaciones precedentes.
Patentes similares o relacionadas:
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado y un sistema para su aplicación, del 11 de Diciembre de 2019, de Aerobits Sp. z o.o: Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado, en un sistema, en el que una o más luces de advertencia están […]
UN SISTEMA PARA EFECTUAR MULTIPLICIDAD DE TAREAS COMPLEJAS POSIBLES SOBRE OBRAS, MEDIANTE EQUIPOS AUTÓNOMOS NO TRIPULADOS EN VUELO., del 24 de Octubre de 2019, de MURA YAÑEZ, Miguel Angel: Existe una necesidad en la industria de efectuar multiplicidad de tareas complejas posibles en obras; de manera segura, aumentando duración de […]
Sistema de orientación de un dron, del 2 de Octubre de 2019, de PARADOX ENGINEERING SA: Sistema de orientación para un dron , que comprende: - una pluralidad de dispositivos que se interconectan en una red inalámbrica […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]
Identificación aeronaves, del 13 de Noviembre de 2018, de ADB Safegate Sweden AB: Procedimiento, implementado en una sistema de atraque de aeronaves , el cual comprende un receptor , un procesador , y una pantalla de […]
Cálculo del tiempo que falta y del tamaño de un objeto en base a la correlación de escala entre imágenes que provienen de un sensor electro - óptico, del 2 de Mayo de 2018, de SAAB AB: Un procedimiento para calcular un valor de Tiempo Que Falta, TTG, entre un vehículo y un objeto intrusivo, comprendiendo el citado procedimiento: • un paso de recuperar […]
Sistema de separación de aeronaves de tráfico, del 18 de Octubre de 2017, de THE BOEING COMPANY: Un método para gestionar la separación entre vehículos , comprendiendo el método: predecir un punto de aproximación más cercano entre un primer […]