Órgano mejorado de aprehensión y transferencia.
Un utillaje mediante el cual durante la utilización los artículos pueden ser recogidos desde una posición,
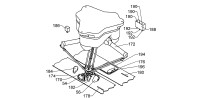
y haciéndolos que desciendan en una segunda posición, cuyo utillaje comprende: dos cuchillas (54, 56) que tienen cada una un borde frontal y un borde posterior, y siendo ambas movibles entre una primera posición en la cual sus bordes frontales están separados por un espacio libre grande y una segunda posición en la cual se solapan los bordes frontales, o bien que están en contacto o están separados por un espacio libre más pequeño; y medios motrices (60, 62) para realizar el movimiento relativo entre las dos cuchillas, para desplazarlas entre la primera y la segunda posiciones, por lo que durante la utilización con las cuchillas (54, 56) en la primera posición, el utillaje puede descender de forma que los lados inferiores de las dos cuchillas hagan contacto con una superficie sobre la cual está en reposo el artículo con los dos bordes frontales de las cuchillas en los lados opuestos del artículo, y pudiendo recogerse el último por las cuchillas mediante la operación de los medios motrices (60, 62) para mover las cuchillas (54, 56) a su segunda posición por debajo del artículo; y comprendiendo además un mecanismo de restricción del movimiento (80, 90) que incluye unos medios de acoplamiento de los artículos, por lo que el acoplamiento entre los medios de acoplo del articulo y el artículo resistirá el movimiento del artículo con respecto a los medios de acoplo del artículo, como resultado de que las cuchillas se deslizan por debajo del artículo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2004/004517.
Solicitante: AEW DELFORD SYSTEMS LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: Pinetrees Road Norwich NR7 9BB REINO UNIDO.
Inventor/es: HAWES,RICHARD JOHN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/90 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
Fragmento de la descripción:
Órgano mejorado de aprehensión y transferencia.
Campo de la invención
Esta invención está relacionada con los dispositivos de aprehensión (utillaje) , mediante los cuales, especial aunque no exclusivamente, pueden recogerse porciones de productos alimenticios desde un lugar (típicamente en una cinta transportadora) , desplazándolas y situándolas en otro lugar (típicamente en otra cinta transportadora o bien en un contenedor tal como una bandeja en otra cinta transportadora) .
Antecedentes En el procesamiento de productos alimenticios y en la industria de embalaje es conocido el corte de grandes piezas de material alimenticio tal como la carne, en porciones más pequeñas, dimensionadas de forma usual, y posteriormente el envasado de las partes cortadas individualmente, o más normalmente en grupos, de tres o más, para su visualización (usualmente en gabinetes de presentación con frío o bien congelados) para la selección ante el publico para su adquisición.
Por tanto, el cerdo y el cordero se cortan en chuletas, la ternera en filetes y la panceta en rodajas. El corte a partir del producto en bruto se consigue con frecuencia utilizando una cuchilla giratoria, y se deja que las porciones (es decir, las chuletas o los filetes) caigan una encima de otra sobre una cinta transportadora en movimiento.
Puede proporcionarse un mecanismo de escape, de forma que las porciones se separen a lo largo de la longitud de la cinta transportadora, y en general las porciones tenderán a caer de forma similar, por ejemplo en el caso de chuletas de cerdo en el borde cada chuleta, la cual se cubrirá mediante una capa de grasa que podrá ser por ejemplo en el borde delantero de cada chuleta en alineación, dependiendo de si el cerdo en bruto a partir del cual se cortan las chuletas es el lado graso de la parte superior o el lado graso de la parte inferior.
No obstante, no existe garantía de que las porciones estén alineadas de esta forma sobre la cinta transportadora.
Se considera deseable que las porciones (por ejemplo, las chuletas) que se presentarán en el denominado pre-envase, estén todas alineadas de una forma similar, y de una en una (de forma que exceptuando la parte más superior, las de debajo estén solapadas parcialmente por las de encima) , o que las porciones estén dispuestas en forma atractiva lado con lado sobre una bandeja plana, de forma que pueda verse el tamaño y la calidad de todas las porciones que conforman el envase.
Hasta ahora la recogida y la colocación de las porciones en bandejas o en otros contenedores, han sido al menos parcialmente realizadas de forma manual. Aunque ha significado que la orientación del producto no ha sido exigida en la cinta transportadora, el proceso exige mucha mano de obra, y que la producción estará limitada a la velocidad con la cual los operadores puedan recoger y colocar las porciones. El trabajo es igualmente tedioso.
Es un objeto de la presente invención el automatizar el proceso anterior.
Es otro objeto el proporcionar un aparato que pueda ser utilizado para la recogida y la transferencia de productos similares (los cuales pueden ser productos similares de productos alimenticios, pero que podrían ser cualesquiera artículos de tamaño similar, tales como pequeños productos manufacturados) , los cuales tengan que ser empaquetados para el almacenamiento, y que puedan visualizarse para la venta.
Tecnología existente
Se han desarrollado robots controlados por ordenador, y se encuentran disponibles a través de ABB Ltd de Milton Keynes, Inglaterra.
Los brazos robóticos IRB 340 e IRB 340SA están adaptados especialmente para la recogida de productos alimenticios tales como las chuletas de cerdo o de cordero, porciones de pollo, filetes de pescado y similares, procediendo a la elevación de cada articulo recogido para permitir que se desplace lateralmente a otra posición (tal como en una cinta transportadora paralela) , en donde se procederá a bajarlo o dejarlo caer sobre la otra cinta transportadora, o bien en una bandeja sobre cualquier cinta transportadora.
Durante la elevación, desplazamiento y descenso, el robot está adaptado para que sea capaz de rotar el artículo que haya recogido a través de un ángulo de 360º, aunque para la mayoría de los propósitos será suficiente con un ángulo de rotación de 180º en cualquier dirección desde la posición en la que se acople el artículo por primera vez.
Para facilitar el posicionamiento del robot, cámaras de vídeo, sensores de posicionamiento, dirección de movimiento y velocidad del movimiento, se proporcionan transductores enlazados con cada cinta transportadora, para suministrar información al ordenador de control. De esta forma, la llegada de cada articulo siguiente a recoger por el robot podrá ser etiquetada, suministrando su posición exacta a través del ancho de la cinta transportadora al ordenador, y si está conformada (en una vista en planta) o marcada, de forma que su orientación pueda determinarse visualmente, en donde las cámaras que observen los artículos podrán suministrar información que permita al ordenador el poder determinar la orientación exacta de cada artículo, y determinar por tanto el valor de la magnitud que necesite girar, para ocupar una orientación dada al posicionarse en la segunda cinta transportadora (o en una bandeja sobre la misma) .
Cuando los artículos se apilen o se presenten en forma individual, podrán ser recogidos y colocados como un solo artículo.
Es un objeto de la presente invención el proporcionar un utillaje (sistema de agarre) que puede montarse y ser operado por medio de dicho brazo robótico.
La memoria técnica de la patente WO99/00306/A expone un utillaje para la recogida y la colocación de porciones de productos alimenticios, y que proporciona la exposición en la cual está basado el preámbulo de la presente reivindicación 1.
Sumario de la invención
De acuerdo con la presente invención se suministra un utillaje mediante el cual durante la utilización los artículos pueden ser recogidos desde una posición, y haciéndolos que desciendan en una segunda posición, cuyo utillaje comprende: dos cuchillas que tienen cada una un borde frontal y un borde posterior, y siendo ambas movibles entre una primera posición en la cual sus bordes frontales están separados por un espacio libre grande y una segunda posición en la cual se solapan los bordes frontales, o bien que están en contacto o están separados por un espacio libre más pequeño; y medios motrices para realizar el movimiento relativo entre las dos cuchillas, para desplazarlas entre la primera y la segunda posiciones, por lo que durante la utilización con las cuchillas en la primera posición, el utillaje puede descender de forma que los lados inferiores de las dos cuchillas hagan contacto con una superficie sobre la cual está en reposo el artículo con los dos bordes frontales de las cuchillas en los lados opuestos del artículo, y pudiendo recogerse el último por las cuchillas mediante la operación de los medios motrices, para mover las cuchillas a su segunda posición por debajo del artículo; y comprendiendo además un mecanismo de restricción del movimiento que incluye unos medios de acoplamiento de los artículos, por lo que el acoplamiento entre los medios de acoplo del articulo y el artículo resistirá el movimiento del artículo con respecto a los medios de acoplo del artículo, como resultado de que las cuchillas se deslizan por debajo del artículo, caracterizado porque:
Reivindicaciones:
1. Un utillaje mediante el cual durante la utilización los artículos pueden ser recogidos desde una posición, y haciéndolos que desciendan en una segunda posición, cuyo utillaje comprende: dos cuchillas (54, 56) que tienen cada una un borde frontal y un borde posterior, y siendo ambas movibles entre una primera posición en la cual sus bordes frontales están separados por un espacio libre grande y una segunda posición en la cual se solapan los bordes frontales, o bien que están en contacto o están separados por un espacio libre más pequeño; y medios motrices (60, 62) para realizar el movimiento relativo entre las dos cuchillas, para desplazarlas entre la primera y la segunda posiciones, por lo que durante la utilización con las cuchillas (54, 56) en la primera posición, el utillaje puede descender de forma que los lados inferiores de las dos cuchillas hagan contacto con una superficie sobre la cual está en reposo el artículo con los dos bordes frontales de las cuchillas en los lados opuestos del artículo, y pudiendo recogerse el último por las cuchillas mediante la operación de los medios motrices (60, 62) para mover las cuchillas (54, 56) a su segunda posición por debajo del artículo; y comprendiendo además un mecanismo de restricción del movimiento (80, 90) que incluye unos medios de acoplamiento de los artículos, por lo que el acoplamiento entre los medios de acoplo del articulo y el artículo resistirá el movimiento del artículo con respecto a los medios de acoplo del artículo, como resultado de que las cuchillas se deslizan por debajo del artículo, caracterizado porque:
2. Un utillaje según la reivindicación 1, en el que cada uno de los bordes posteriores de las cuchillas incluyen un labio o resalte vertical o pared, que en la utilización se acoplará a las zonas marginales opuestas del artículo cuando las cuchillas ocupen su segunda posición.
3. Un utillaje según la reivindicación 1 ó 2, en el que el miembro deformable comprende un bloque de material deformable flexible, una placa flexible o bloque, o una placa en forma de disco de acero flexible o similar, o uno o más dedos de acero flexible o similar, teniendo una rigidez lateral pero estando adaptados para flexionar en forma flexible en una dirección hacia arriba, con respecto a las cuchillas, o uno o más dedos de acero inoxidable doblados para apuntar hacia abajo parad acoplar la superficie superior del artículo, pero que puede estar aplanado más o menos por una fuerza ascendente, con el fin de acomodar el grosor del artículo.
4. Un utillaje según la reivindicación 3, en el que existen seis dedos de resorte (90) , tres dedos en cada lado del utillaje, en donde cada dedo (90) está doblado hacia abajo para formar una zapata (98) de acoplamiento del artículo.
5. Un utillaje según cualquiera de las reivindicaciones 1 a 4, en donde un miembro de soporte se posiciona por encima de cada una de las cuchillas, y medios motrices para mover los miembros de soporte y las cuchillas, las cuales en uso operan para mover tanto los miembros de soporte como las cuchillas, hasta que se agarre un artículo entre los miembros de soporte, y posteriormente el poder mover solo las cuchillas por debajo del artículo, en el que los medios motrices mantienen los miembros de soporte en la posición de agarre del artículo, conforme las cuchillas se retiran subsiguientemente desde la parte por debajo del artículo, para prevenir el arrastre friccional en el lado inferior del último para impedir la separación o el movimiento del artículo.
6. Un utillaje según la reivindicación 5, en el que los medios motrices solo operan para desacoplar los miembros de soporte del artículo después de que las cuchillas se hayan desplazado desde debajo del artículo.
7. Un utillaje según las reivindicaciones 5 ó 6, en el que el medio de accionamiento para los miembros de soporte incluye una conexión de movimiento perdido u holgura en combinación con un resorte de compresión de baja tasa de resorte hasta el punto de un sobre-recorrido creado por la conexión de holgura, y que proporciona la fuerza de agarre lateral sobre el artículo, cuando los miembros de soporte se desplazan en el acoplamiento del artículo, y asegurando también que la holgura se acomoda conforme se retrae el sistema de accionamiento.
8. Un utillaje según cualquiera de las reivindicaciones 5 a 7, en el que cada miembro de soporte se encuentra en contacto deslizante con la superficie superior de la cuchilla con la que está asociado, de forma que el movimiento relativo durante el cierre en el producto y/o durante la apertura para liberar el producto, actúa de una forma de autolimpieza, porque el miembro de soporte raspa para limpiar la superficie superior de la cuchilla.
9. Un utillaje según cualquiera de las reivindicaciones 5 a 8, en donde después del movimiento del artículo hasta la segunda mencionada posición, los medios motrices son operados para retraer las cuchillas, para alinearse con las caras internas de los miembros de soporte, y posteriormente los medios motrices son operados para retraer ambas cuchillas y los miembros de soporte en sincronismo, mediante una distancia justo suficiente para liberar el artículo, de forma que la posición del artículo con respecto a la superficie de soporte permanezca substancialmente sin alteración desde lo determinado por la posición hasta la cual se haya movido el utillaje.
10. Un utillaje según cualquiera de las reivindicaciones anteriores, en el que el mecanismo mediante el cual las dos cuchillas y/o los miembros de soporte, si estuvieran provistos, se hace que se muevan para ejercer un par motor despreciable alrededor de los ejes de movimiento de torsión del brazo robótico, y/o alrededor del eje rotacional entre el brazo y el utillaje, y/o alrededor de cualquier eje en el que una parte del brazo pueda rotar con respecto a la otra parte del mismo.
11. Un utillaje según cualquier reivindicación anterior, en el que los medios motrices actúan sobre una de las cuchillas, y en el que una conexión entre las dos cuchillas transmite una fuerza a la otra cuchilla, para hacer que cada una se mueva de una forma apropiada.
12. Un utillaje según cualquier reivindicación anterior, en el que durante la utilización justamente antes de su movimiento deslizante hacia dentro por debajo del artículo, las cuchillas son presionadas en contacto con la superficie de soporte plana sobre la cual se transporta el artículo, y en donde se proporciona una conexión de movimiento perdido o juego flexible entre las cuchillas y el brazo robótico, el cual permite a las cuchillas el hacer contacto con la superficie de soporte del artículo en forma breve antes de detener del movimiento hacia abajo del extremo del brazo robótico que transporta el utillaje, y para el movimiento final del brazo robótico el poder comprimir la conexión del juego flexible después de que las cuchillas hagan contacto con la mencionada superficie, en el que la energía almacenada en la compresión de la conexión del juego flexible servirá para poder ejercer una fuerza hacia debajo de las cuchillas, resistida por la mencionada superficie, y manteniendo por tanto las cuchillas en contacto deslizante con la superficie, conforme se desplacen y se deslicen hacia la parte inferior del artículo, para permitir que las cuchillas se cierren en su segunda posición.
13. El utillaje según cualquier reivindicación anterior, en combinación con un sistema de visión que proporciona señales de imágenes a un ordenador de control del brazo robótico, y en donde este ultimo está programado para determinar la orientación de cada artículo a recoger y elevar, y en particular la dirección de corte de un conjunto cortado, y para generar señales de control para hacer rotar el utillaje en la forma apropiada, para asegurar que con antelación a que el utillaje se acople a un articulo, o pila de artículos, y en particular un conjunto cortado, su orientación con respecto al artículo o conjunto sea tal que las cuchillas, y los miembros de soporte si estuvieran provistos, se desplazarán apropiadamente con respecto al artículo o artículos o conjunto.
14. Un producto de manipulación de productos, que comprende una primer cinta transportadora, una segunda cinta transportadora separada de la primera, un brazo robótico y un control por ordenador para las mismas, teniendo un utillaje según cualquiera de las reivindicaciones 1 a 13, fijado a su extremo remoto y movible, siendo tanto el brazo como el utillaje controlables por las señales del control por ordenador para posicionar el utillaje alrededor de un artículo en una cinta transportadora, y en caso de estar provisto poder mover los miembros de soporte en contacto opuesto con el artículo y deslizando las cuchillas por debajo del artículo, y posteriormente elevar el artículo desde una cinta transportadora por el control apropiado del brazo robótico, y moviendo el brazo y por tanto el utillaje que contiene el artículo, con el fin de posicionarlo sobre la otra cinta transportadora, y posteriormente abrir las cuchillas y los miembros de soporte, si estuvieran provistos, y depositar el artículo sobre la otra cinta transportadora.
15. Un sistema de manipulación de productos según la reivindicación 14, el cual incluye unos medios de cámaras y medios de sensores, el cual genera señales que se suministran al ordenador, y en donde este ultimo está programado para determinar la posición y/u orientación y/o la naturaleza de cada artículo sobre la mencionada cinta transportadora, y generando señales de control que provoquen que los motores operen para elevar y/o rotar y/o bajar el utillaje y/o ajustar el brazo robótico, con el fin de que el utillaje se posicione en el momento justo con respecto a un artículo que se está desplazando sobre una cinta transportadora, para permitir al utillaje el recoger el artículo de la misma, y si se precisa poder rotarlo durante su tránsito, y posteriormente posicionarlo sobre la otra cinta transportadora en el punto preciso exacto en el tiempo y en la orientación correcta.
Patentes similares o relacionadas:
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Mecanismo de suministro de boquilla de vertido y máquina de sellado de boquilla de vertido, del 12 de Febrero de 2020, de TOYO JIDOKI CO., LTD.: Un mecanismo de suministro de boquilla de vertido que comprende: un dispositivo de retención de boquilla de vertido para retener […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Sistemas y métodos de transportador mecánico y envasado de alimentos, del 8 de Enero de 2020, de INTERCONTINENTAL GREAT BRANDS LLC: Un aparato de envasado de productos alimenticios que comprende: un transportador mecánico corriente arriba que transporta artículos […]
Dispositivo y método para transferir envases, del 23 de Octubre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Dispositivo de transferencia para transferir envases de un dispositivo de avance de envases, en el que están alineados en al […]
DISPOSITIVO PARA RECOGER Y DESPRENDER MEDIOS ÓPTICOS, del 11 de Septiembre de 2019, de GLIFSTOCK, S.L: Dispositivo para recoger y desprender medios ópticos (Cds, DVDs y Blu-Rays), el cual se ha realizado en orden a obtener mayor facilidad y abaratar el posible mantenimiento […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]