Equipo de manejo y actuación sobre gruás-pórtico para descarga de materiales a distancia.
Equipo de manejo y actuación sobre gruás-pórtico para descarga de materiales a distancia que contempla,
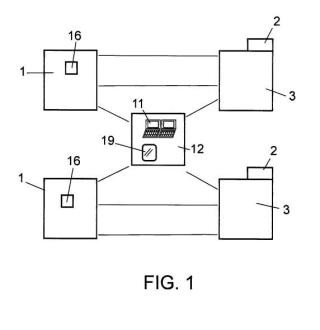
al menos dos cabinas en tierra (1) que controlan un descargador (3) distinto cada una; y disponen cada una de un PLC interconectados entre sí y con un panel de control (11) en sala técnica (12), donde se implementan:
- Sistema de control del descargador (3) que automatiza las trayectorias de la cuchara (9), carro (17) y traslación del descargador (3).
- Sistema de supervisión para parametrizar y visualizar entradas y salidas del sistema real.
- Sistema de adquisición de datos por escáner 3D (18).
- Interface de usuario por pantalla táctil (19).
- Librería de comunicaciones entre los distintos equipos de cabina en tierra, descargadores y sala técnica a través de la red, a través de memoria compartida y con los PLC's de los descargadores y de las cabinas en tierra.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300327.
Solicitante: EUROPEAN BULK HANDLING INTALLATION EBHI, S.A.
Nacionalidad solicitante: España.
Inventor/es: ARTIME LOURIDO,Jose Laureano, NOVAL HERRERO,Alfredo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Sistemas o dispositivos de control (exclusivamente para mecanismos de rodadura de cuerdas, cables o cadenas B66D 1/40).
Fragmento de la descripción:
EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GROAS-PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA
OBJETO DE LA INVENCIÓN
La invención, tal como expresa el enunciado de la presente memoria descriptiva, se refiere a un equipo de manejo y actuación sobre grúas-pórtico para descarga de materiales a distancia, el cual aporta, a la función a que se destina, varias ventajas e innovadoras caracteristicas, que se describirán más adelante y que suponen una destacable mejora del estado actual de la técnica frente a lo ya conocido en su campo de aplicación.
Más en particular, el objeto de la invención se centra en un equipo para labores de descarga de materiales, especialmente para la descarga de graneles sólidos en buque, mediante elementos descargadores móviles, concretamente grúas-pórtico, controlados a distancia desde cabinas independientes del descargador y situadas en tierra, en las que, además, es posible actuar de forma simulada para entrenamiento de su manejo, presentando dicho equipo, entre otras innovaciones, la particularidad de contar además con un sistema de descarga que permite realizar un control automático y remoto de dicha descarga, mediante el cual se pueden realizar ciclos completos de descarga optimizando al máximo el tiempo empleado en la ejecución de las trayectorias de ida y vuelta, asi como la cantidad de material cargado en cada ciclo, lo cual se traduce en un mayor rendimiento en la producción y, consecuentemente, en una reducción de costes.
CAMPO DE APLICACIÓN DE LA INVENCIÓN
El campo de aplicación de la presente invención se enmarca dentro del sector de la industria dedicada a la fabricación de aparatos, dispositivos y elementos auxiliares para la descarga de materiales en general, y especialmente para la descarga de materiales transportados en un buque, abarcando asimismo los equipos de simulación de tales actuaciones.
ANTECEDENTES DE LA INVENCIÓN
Como referencia al estado de la técnica, debe mencionarse la existencia de los siguientes documentos relacionados con el equipo de la presente invención:
Por la Patente de Invención solicitada en España con el número 9900509, publicada con el número 2166250, se conoce un simulador de grúa de carga y descarga compuesto por una cabina y un sistema informático que recibe información sobre la posición de unos dispositivos de mando colocados en el interior de dicha cabina situada sobre una plataforma.
El sistema utiliza esta información para generar en tiempo real una serie de imágenes sintéticas de un mundo virtual que se proyectan sobre una pantalla situada frente a la cabina, y además, gobierna los movimientos de la plataforma de forma tal que el usuario siente las mismas aceleraciones que el sistema real.
Del mismo solicitante es el expediente solicitado en España con el número 9902503, correspondiente a perfeccionamientos introducidos en la
Patente de Invención 9900509 por simulador de grúas de carga y descarga, en la cual se describe y reivindica un sistema de visión para facilitar la simulación de distintos tipos de grúas, utilizando un juego de proyectores sincronizados que permiten al operador distintos ángulos de visión.
Por los expedientes de Patentes de Invención publicados en Japón con los números 2000-159475 y 08- 339161 se conoce la existencia de simuladores para la carga y descarga de contenedores y demás materiales.
Y, por el expediente de Patente ES2292268 se conoce una Cabina en tierra para la actuación de elementos de descarga de materiales en general, aplicable como elemento de entrenamiento para su manejo, la cual, destinada a implementar los elementos físicos y lógicos necesarios para realizar dicha descarga mediante un descargador de los instalados en grúas móviles o de pórtico, está esencialmente constituida por un sistema visual, para la proyección de imágenes; un sistema de imagen y sonido, que captura los planos y sonidos necesarios para el maquinista a través del sistema visual; una cabina de mando, con las interfaces físicas, a través de las que se ejecutan el proceso de descarga real y de simulación; medios automáticos de control que interconectan los dispositivos físicos de mando y control con un PLC instalado en el pórtico; una plataforma de movimiento de la cabina, que emula los movimientos cuando se encuentra en modo "simulación"; un sistema de transmisión para la conectividad física y lógica entre los equipos instalados en el pórtico y los asociados a la cabina; y un sistema de simulación que proporciona los escenarios simulados.
Sin embargo, por parte del solicitante se desconoce la existencia en la actualidad de ninguna invención que presente unas caracteristicas técnicas, estructurales y constitutivas semejantes a las que presenta el equipo objeto de la presente invención, según se reivindica, y cuyo objetivo esencial es proporcionar un sistema mejorado de dicho tipo de sistemas de descarga desde cabina en tierra que a la vez sirven como simulador de entrenamiento, centrándose las mejoras, esencialmente, en el control automático de la descarga para optimizar su efectividad y, por tanto, su rendimiento.
EXPLICACIÓN DE LA INVENCIÓN
Asi, el equipo de manejo y actuación sobre grúas-pórtico para descarga de materiales a distancia que la presente invención propone se configura como una novedad dentro de su campo de aplicación, ya que a tenor de su implementación se alcanzan satisfactoriamente los objetivos anteriormente señalados, estando los detalles caracterizadores que lo hacen posible y que lo distinguen de lo ya conocido, convenientemente recogidos en las reivindicaciones finales que acompañan a la presente memoria descriptiva del mismo.
De forma concreta, lo que la invención propone es un equipo de descarga de materiales, especialmente materiales granulados transportados a granel en un buque, y que tiene como finalidad controlar los movimientos de una grúa-pórtico o descargador (en adelante solo descargador), para que la cuchara de la que está provisto dicho descargador vaya recogiendo el producto del interior de la bodega del
buque y lo vaya depositando en una tolva dispuesta sobre el contenedor de recogida correspondiente, comprendiendo, como elementos ya conocidos:
- al menos una cabina de tierra con
interfaces fisicas para que el maquinista pueda ejecutar los procesos de descarga real y simulado;
- sistema de proyección y captación de imagen 10 y sonido compuesto por cámaras focalizadas sobre la
bodega y pantallas frente a la cabina en tierra;
medios automáticos de control para interconectar los dispositivos fisicos de mando y 15 control de la cabina, con el PLC (controlador lógico programable) del descargador.
- plataforma de movimiento, que replica en la cabina de tierra los movimientos reales de la cabina
que incorpora el descargador, o emula dichos movimientos para las simulaciones;
- sistema de transmisión para la conectividad fisica y lógica entre los equipos instalados en el
descargador y los equipos y sistemas asociados a la cabina de tierra;
y sistema de simulación que proyecta escenarios visuales virtuales, y actúa conforme a un 30 modelo matemático réplica del proceso de descarga.
Pues bien, a partir de dicha configuración ya conocida, el equipo preconizado, además de combinar la actuación de, al menos, dos cabinas en tierra que 35 actúan sobre dos descargadores distintos de una misma instalación, presenta las siguientes características
innovadoras:
En primer lugar, ambas cabinas están dotadas de elementos de intercomunicación con el resto de maquinas y equipos de trabajo de la instalación, aumentando la seguridad del conjunto del sistema y proveyendo a los operadores de cabina de una herramienta de trabajo imprescindible para la ejecución de las maniobras.
Dichos elementos de intercomunicación consisten, por un lado en un canal telefónico con el resto de extensiones de centralita de la empresa para cada una de las cabinas y un teléfono redundante directamente conectado a cada centralita de los descargadores mediante conversores de fibra óptica. Esto asegura comunicación cableada redundante y con acceso directo a las extensiones del descargador si así se requiere por parte del operario.
Por otro lado, también se instala en ambas cabinas un sistema de emisora de radio VHF de base fija, funcionando en frecuencias propias registradas por la empresa, y sintonizada acorde al repetidor general de la instalación, lo que asegura una comunicación simple con cualquier otra máquina u operario que disponga de una emisora equivalente y que tenga seleccionado el mismo canal de trabajo.
Según otra de las características del equipo de la invención,...
Reivindicaciones:
1.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS- PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA que, contando con, al menos una cabina de tierra (1) con interfaces físicas para que el maquinista pueda ejecutar los procesos de descarga real y simulado, sistema de proyección pantallas (5, 5' ) y captación de imagen y sonido compuesto por cámaras (6, 6') y micrófonos (7) instalados en el descargador (3) y focalizadas sobre la bodega (4), medios automáticos de control para interconectar los dispositivos físicos de mando y control de la cabina, con el PLC (controlador lógico programable) del descargador (3), plataforma (13) de movimiento, que replica en la cabina de tierra los movimientos reales de la cabina real (2) del descargador (3), sistema de transmisión para la conectividad física y lógica entre los equipos instalados en el descargador y en la cabina de tierra, y sistema de simulación que proyecta escenarios visuales virtuales del proceso de descarga, está caracterizado porque se contempla la existencia de, al menos dos cabinas en tierra (1) que controlan un descargador (3) distinto cada una; y porque cada cabina en tierra (1) y cada descargador (3) disponen de un PLC interconectados entre sí y con los equipos y un panel de control (11) previsto en una sala técnica (12) en los que se implementan para realizar un control automático de la descarga los siguientes sistemas:
- Sistema de control del descargador (3) consistente en un software que automatiza sus maniobras realizando el cálculo matemático para la programación de las trayectorias de la cuchara (9), actuando sobre la traslación del carro (17) sustentación, apertura y cierre de la cuchara (9), traslación del descargador
- Sistema de supervisión constituido por una aplicación de software que permite parametrizar y
visualizar todas las entradas y salidas del sistema real.
- Sistema de adquisición de datos a través de escáner 3D (18) instalado en el exterior de la cabina
real (2) del descargador (3) y orientado de forma que abarque toda la bodega (4) del buque, y dotado del software pertinente para el control y la adquisición de datos.
- Interface de usuario mediante una pantalla
táctil (19), en la que se visualiza la malla de material que se obtiene del escáner.
Librería de comunicaciones entre los 20 distintos equipos de cabina en tierra, descargadores y sala técnica a través de la red, a través de memoria compartida y con los PLC's de los descargadores y de las cabinas en tierra.
2.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS-
PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA, según la reivindicación 1, caracterizado porque el sistema de control del descargador utiliza, como estrategia, la realimentación del sistema para efectuar correcciones 30 de forma dinámica; genera entradas al autómata equivalentes a las de los controles y para regular dichas entradas utiliza un regulador PD (proporcional- derivativo) y un predictor de Smith que actúa sobre un modelo cinemático del descargador; e implementa un 35 método de anti-sway para reducir la oscilación pendular de la cuchara en la trayectoria de traslación del
carro.
3.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS- PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA, según la reivindicación 1 ó 2, caracterizado porque el control del descargador se ejerce a través de las entradas y salidas que proporciona el PLC situado en el propio descargador o bien a través de las que se obtienen mediante el PLC que se encuentra en la cabina de tierra.
4.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS- PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA, según cualquiera de las reivindicaciones 1-3, caracterizado porque, en al menos una de las cabinas en tierra (1) , incorpora pantallas principales (5) situadas sobre soportes móviles (8) que pueden bajar sobre su vertical para ocultarlas tras una pantalla secundaria (5' ) más sencilla.
5.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS- PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA, según cualquiera de las reivindicaciones 1-4, caracterizado porque incorpora, al menos, una cámara principal (6' ) de alta definición para la toma principal de la bodega dotada de control remoto, capaz de variar parámetros como el zoom, iris o ganancia.
6.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS- PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA, según cualquiera de las reivindicaciones 1-5, caracterizado porque cada descargador (3) incorpora un videograbador digital (10) de 16 canales y conexión a la red con mando a distancia y conexión Ethernet.
7.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS-
PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA, según cualquiera de las reivindicaciones 1-6, caracterizado porque las cabinas en tierra (1) tienen un cierre perimetral vallado (14) con puerta de acceso (15) 5 conectada con automatismos de seguridad que detectan la apertura de la misma y dan orden de bajada inmediata a la cabina.
8.- EQUIPO DE MANEJO Y ACTUACIÓN SOBRE GRUÁS- 10 PÓRTICO PARA DESCARGA DE MATERIALES A DISTANCIA, según cualquiera de las reivindicaciones 1-7, caracterizado porque las cabinas en tierra (1) además de un canal telefónico convencional y un teléfono redundante directamente conectado a la centralita de los 15 descargadores (2) mediante fibra óptica, cuentan con emisora de radio VHF (16) de base fija, funcionando en frecuencias propias.
Patentes similares o relacionadas:
Sistema para mover automáticamente un brazo articulado, en particular de una grúa de carga, hacia una posición objetivo, del 23 de Octubre de 2019, de FASSI GRU S.p.A: Sistema para mover automaticamente un brazo articulado hacia una posicion objetivo, que comprende: - dicho brazo articulado que comprende una pluralidad de […]
Sistema para mover automáticamente un brazo articulado, particularmente de una grúa articulada, del 23 de Octubre de 2019, de FASSI GRU S.p.A: Sistema para mover automáticamente un brazo articulado , que comprende: - dicho brazo articulado , que comprende una pluralidad de cuerpos conectados […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
Grúa torre rotatoria, del 3 de Abril de 2019, de Liebherr-Components Biberach GmbH: Grúa, en particular grúa torre rotatoria, con un pescante que puede girar en torno a un eje vertical y en el que está dispuesto de manera desplazable un […]
Freno para una máquina eléctrica y máquina eléctrica equipada con un freno de este tipo, del 2 de Noviembre de 2018, de MOTEURS LEROY-SOMER: Freno para motor eléctrico , que comprende: - una culata , - por lo menos un disco de freno destinado a ser accionado […]
Grúa torre rotatoria, del 26 de Septiembre de 2018, de Liebherr-Components Biberach GmbH: Grúa, en particular grúa torre rotatoria, con un pescante que puede girar en torno a un eje vertical y en el que está dispuesto de manera desplazable […]
Controlador de grúa, del 4 de Abril de 2018, de LIEBHERR-WERK NENZING GMBH: Un controlador de grúa para el control semiautomático de una grúa giratoria, comprendiendo la grúa al menos un accionador giratorio para crear un movimiento de giro […]
Método y sistema para controlar un manipulador de ingeniería a gran escala, del 6 de Septiembre de 2017, de Hunan Sany Intelligent Control Equipment Co., Ltd: Método para controlar un manipulador de ingeniería a gran escala, estando dotado cada uno de los segmentos de pluma del manipulador de un mecanismo de accionamiento, […]