Aparato de colocación de soporte de piezas de trabajo que usa un accionamiento indirecto por fricción.
Un aparato para colocar un soporte de pieza de trabajo (14, 18) con respecto a una estación de trabajo que comprende:
un lector codificador (30) situado en una posición fija en una estación de trabajo para generar una señal en respuesta a la interacción con al menos una tira codificadora;
una pluralidad de soportes de piezas de trabajo (14, 18) pudiendo moverse cada uno a lo largo de al menos un carril a lo largo de una trayectoria de recorrido a través de la estación de trabajo, y teniendo una tira codificadora (32) conectada al mismo, teniendo la tira codificadora (32) un segmento de identificación y un segmento de información de colocación absoluta, incluyendo el segmento de identificación al menos un soporte de pieza de trabajo o información de identificación de configuración de la pieza de trabajo que interactúa de manera operativa con el lector codificador (30) situado en la estación de trabajo;
un accionamiento indirecto por fricción (22) que se acopla al soporte de pieza de trabajo (14, 18) para mover el soporte a lo largo de la trayectoria de recorrido a través de la estación de trabajo, y
un sistema de control de retroalimentación de bucle cerrado que incluye un controlador (28) para la recepción de señales desde el lector codificador (30) y para enviar señales de salida al accionamiento por fricción (22) para colocar con precisión un soporte de pieza de trabajo (14, 18) en una colocación deseada de la estación de trabajo, permitiendo que el sistema de control de retroalimentación de bucle cerrado de cada soporte de pieza de trabajo (14, 18) y que la configuración de pieza de trabajo asociada se detengan en una única posición deseada en una única estación de trabajo o en una pluralidad de posiciones deseadas en una única estación de trabajo para mejorar la accesibilidad a diferentes ubicaciones de la pieza de trabajo soportada,
caracterizado por que el segmento de identificación se coloca en ambos extremos exteriores de la tira codificadora, y el segmento de ubicación absoluta se coloca en el centro de la tira codificadora.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12183497.
Solicitante: COMAU, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 21000 TELEGRAPH ROAD SOUTHFIELD, MI 48033 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KILIBARDA,VELIBOR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q17/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › para indicar o medir la posición existente o deseada de la herramienta o la pieza de trabajo.
- B23Q17/24 B23Q 17/00 […] › utilizando medios ópticos.
- B23Q7/14 B23Q […] › B23Q 7/00 Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00). › coordinados para permitir un trabajo en cadena.
- B65G1/00 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02).
- B65G43/00 B65G […] › Dispositivos de control, p. ej. de seguridad, de alarma, de corrección de errores.
- B65G54/02 B65G […] › B65G 54/00 Transportadores no mecánicos no previstos en otro lugar. › electrostáticos, eléctricos o magnéticos.
- G01D5/249 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando código de pulsos.
- G06K13/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Transporte de soportes de registro de una posición a otra, p. ej. de una posición de alimentación a una posición de perforación (transporte de soportes de registro junto con otra operación, p. ej. con lectura G06K 17/00).
- G06K17/00 G06K […] › Métodos o disposiciones para hacer trabajar en cooperación los equipos comprendidos por varios de los grupos principales G06K 1/00 - G06K 15/00, p. ej. ficheros automáticos de tarjetas incluyendo las operaciones de transporte y de lectura.
- H02K41/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › Sistemas de propulsión en los cuales un elemento rígido se desplaza a lo largo de un camino bajo los efectos de la acción dinamoeléctrica que se ejercen entre este elemento y un flujo magnético que se propaga a lo largo del camino.
PDF original: ES-2532712_T3.pdf
Fragmento de la descripción:
Aparato de colocación de soporte de piezas de trabajo que usa un accionamiento indirecto por fricción Campo de la invención La presente invención se refiere a un aparato para colocar con precisión una pieza de trabajo que se transporta a lo largo de una línea de ensamblaje mediante un sistema de control de retroalimentación de bucle cerrado para un sistema de accionamiento indirecto o sistema de accionamiento por fricción, y más en particular, a un aparato de colocación absoluta para su uso con un sistema de transporte donde un lector puede colocarse en una ubicación estacionaria en una estación de trabajo y una tira codificadora de colocación absoluta puede conectarse a la porción móvil del sistema de transporte para suministrar información al lector con referencia a la posición de la paleta y/o de la pieza de trabajo y/o de la identificación de la paleta y/o de la pieza de trabajo.
Antecedentes de la invención Un sistema transportador modular que tiene múltiples elementos móviles bajo un control independiente se divulga en la Patente de Estados Unidos Nº 6.191.507. La guía incluye múltiples lectores codificadores lineales separados en posiciones fijas a lo largo de la misma, y cada paleta incluye una tira codificadora lineal que tiene una longitud R 20 mayor que la separación E entre los lectores. Los controladores de la sección de la guía asocian las tiras codificadoras solo con un lector cada vez para decidir la posición de las paletas basándose en la posición fija de los lectores y las posiciones relativas de las tiras en relación con los mismos. Las paletas incluyen imanes que producen un avance para desplazarse independientemente a lo largo de la guía, donde cada sección de guía incluye una pluralidad de bobinas controladas individualmente que se estrechan a lo largo de la longitud de la misma. Los controladores de sección también regulan y conmutan las bobinas de las secciones de guía correspondientes para controlar independientemente cada paleta.
El documento EP-0340639 divulga un aparato de acuerdo con el preámbulo de la reivindicación 1.
Sumario de la invención La presente invención se define en las reivindicaciones 1 y 9. Es adecuada para su uso con un sistema transportador power roll, y/o un sistema transportador versaroll que pueden adquirirse en el mercado gracias a Progressive Tool & Industries, Co., una empresa del Estado de Michigan, que tiene su sede de negocio principal en 35 21000 Telegraph Road, Southfield, MI 48034. Un aparato de ubicación de precisión para un sistema de transporte puede incluir un accionamiento indirecto por fricción que puede acoplarse a porciones móviles del sistema de transporte, un lector codificador fijo en una posición estacionaria en una estación de trabajo a lo largo de una trayectoria de recorrido del sistema de transporte, y una tira codificadora conectada a la porción móvil del sistema de transporte para el paso de manera operativa a través del lector fijo para determinar la ubicación precisa de la porción móvil del sistema de transporte en la estación de trabajo y/o para determinar una identificación de la porción móvil y/o de la pieza de trabajo transportada por la porción móvil del sistema de transporte.
Otras aplicaciones de la presente invención serán aparentes para los expertos en la materia al leer la siguiente descripción del mejor modo contemplado para poner en práctica la invención junto con los dibujos adjuntos. 45
Breve descripción de los dibujos La descripción en el presente documento hace referencia a los dibujos adjuntos en los que los números de referencia similares se refieren a partes similares en las varias vistas, y en los que:
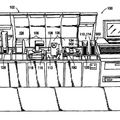
La Figura 1 es una vista en perspectiva de un sistema de transporte que tiene un aparato de ubicación precisa de acuerdo con la presente invención;
La Figura 2 es una vista en sección transversal del sistema de transporte y el aparato de ubicación precisa de 55 acuerdo con la presente invención;
La Figura 3 es una vista en perspectiva inferior del sistema de transporte con el aparato de ubicación precisa de acuerdo con la presente invención tal como se ilustra en las Figuras 1 y 2;
La Figura 4 es un detalle del aparato de ubicación precisa de acuerdo con la presente invención con una tira codificadora unida a la parte inferior de una porción móvil del sistema de transporte y un lector fijo en una posición estacionaria con respecto a la estación de trabajo;
La Figura 5 es una vista en perspectiva de un sistema de transporte alternativo con el aparato de ubicación precisa 65 de acuerdo con la presente invención;
La Figura 6 es una vista en detalle del aparato de ubicación precisa de acuerdo con la presente invención;
La Figura 7 es un gráfico que representa la aceleración frente a tiempo de un sistema de colocación conocido; y La Figura 8 es un gráfico que ilustra la aceleración frente a tiempo para el sistema de colocación precisa de acuerdo con la presente invención.
Descripción detallada de la realización preferente Ahora con referencia a las Figuras 1-4, se ilustra un aparato 10 de ubicación precisa para un sistema de transporte 12. El sistema de transporte 12 puede tener la forma de una paleta 14 móvil soportada en un sistema de accionamiento versaroll 16 tal como se ilustra en las Figuras 1-4, o puede tener la forma de un trole elevado o soporte 18 soportado para el movimiento a lo largo de un sistema versaroll 20 tal como se ilustra en las Figuras 5-6. En ambos casos, el sistema de transporte 12 incluye un accionamiento indirecto por fricción 22. El accionamiento 22 puede incluir al menos un motor 26 que acciona una rueda 24 que puede acoplarse a la porción móvil 14 del sistema de transporte 12. La rueda 24 se acciona en respuesta a la rotación del motor 26. El motor 26 se hace funcionar en respuesta a las señales recibidas desde un controlador 28. El accionamiento 22 también puede incluir una o más poleas para transferir el movimiento rotativo del motor a ruedas motrices 24 adicionales. El sistema de transporte 12 puede incluir ruedas guía junto con las ruedas motrices a lo largo de la trayectoria de recorrido en caso deseado. El aparato 10 de ubicación precisa puede incluir un lector codificador óptico 30 fijo en una posición estacionaria en la estación de trabajo a lo largo de la trayectoria de recorrido del sistema de transporte 12. El lector codificador óptico 30 puede hacerse funcionar para leer una tira codificadora 32 conectada de manera segura a la porción móvil 14 del sistema de transporte 12. El aparato 10 de ubicación precisa de acuerdo con la presente invención permite que la porción móvil del sistema de transporte 12 se detenga en un intervalo de ± 0, 4 mm a lo largo de la dirección de la trayectoria de recorrido del sistema de transporte. El aparato 10 de ubicación precisa de acuerdo con la presente invención puede incluir también una superficie de leva de ubicación y un seguidor de leva, tal como un miembro de ubicación y rodillos 34, 36 correspondientes conectados a la porción móvil del sistema de transporte para colocar con precisión la porción con respecto a la estación de trabajo.
Ahora, con referencia a las Figuras 5 y 6, el sistema de transporte 12 puede incluir un trole elevado o soporte 18 soportado en un sistema de accionamiento versaroll 20. El aparato 10 de ubicación precisa puede incluir un lector codificador óptico 30 fijo en una ubicación estacionaria con respecto a la estación de trabajo y una tira codificadora 32 conectada de manera segura a la porción móvil 18 del sistema de transporte 12. El lector codificador óptico 30 escanea de manera operativa la tira codificadora conectada a la porción móvil del sistema de transporte a medida que la porción móvil 18 entra en la estación de trabajo enviando una señal al controlador 28. El controlador 28 envía una señal apropiada al motor de accionamiento 26 para controlar el movimiento de la porción móvil del sistema de transporte en respuesta a la señal del codificador. El sistema de accionamiento versaroll 22 puede incluir al menos una rueda motriz 24 que se acopla de manera operativa a la porción móvil 18 del sistema de transporte 12. La rueda 24 puede accionarse en rotación mediante al menos un motor 26. Una o más poleas también pueden accionarse mediante el motor 26 para accionar ruedas 24 adicionales colocadas a lo largo de la trayectoria de recorrido para el sistema de transporte. Las ruedas guía también pueden proporcionarse a lo largo de la trayectoria de recorrido en caso deseado. Las ruedas 24, motor 26 y controlador 28 definen un accionamiento indirecto por fricción 22 para el sistema de transporte 12.
Ahora, con referencia a la Figura 7, el gráfico... [Seguir leyendo]
Reivindicaciones:
1. Un aparato para colocar un soporte de pieza de trabajo (14, 18) con respecto a una estación de trabajo que comprende:
un lector codificador (30) situado en una posición fija en una estación de trabajo para generar una señal en respuesta a la interacción con al menos una tira codificadora; una pluralidad de soportes de piezas de trabajo (14, 18) pudiendo moverse cada uno a lo largo de al menos un carril a lo largo de una trayectoria de recorrido a través de la estación de trabajo, y teniendo una tira codificadora (32) conectada al mismo, teniendo la tira codificadora (32) un segmento de identificación y un segmento de información de colocación absoluta, incluyendo el segmento de identificación al menos un soporte de pieza de trabajo o información de identificación de configuración de la pieza de trabajo que interactúa de manera operativa con el lector codificador (30) situado en la estación de trabajo; un accionamiento indirecto por fricción (22) que se acopla al soporte de pieza de trabajo (14, 18) para mover el soporte a lo largo de la trayectoria de recorrido a través de la estación de trabajo, y un sistema de control de retroalimentación de bucle cerrado que incluye un controlador (28) para la recepción de señales desde el lector codificador (30) y para enviar señales de salida al accionamiento por fricción (22) para colocar con precisión un soporte de pieza de trabajo (14, 18) en una colocación deseada de la estación de trabajo, permitiendo que el sistema de control de retroalimentación de bucle cerrado de cada soporte de pieza de trabajo (14, 18) y que la configuración de pieza de trabajo asociada se detengan en una única posición deseada en una única estación de trabajo o en una pluralidad de posiciones deseadas en una única estación de trabajo para mejorar la accesibilidad a diferentes ubicaciones de la pieza de trabajo soportada, caracterizado por que el segmento de identificación se coloca en ambos extremos exteriores de la tira codificadora, y el segmento de ubicación absoluta se coloca en el centro de la tira codificadora.
2. El aparato de la reivindicación 1, en donde el aparato se adapta para identificar al menos una de una configuración particular de un soporte de pieza de trabajo (14, 18) o una configuración particular de una pieza de trabajo soportada a partir de las señales del lector codificador.
3. El aparato de las reivindicaciones 1 o 2, en el que el sistema de retroalimentación de bucle cerrado se adapta para detener configuraciones particulares de soporte de piezas de trabajo o configuraciones particulares de piezas soportadas en un soporte de pieza de trabajo en diferentes ubicaciones con respecto a una estación de trabajo basándose en el soporte de pieza de trabajo o en la configuración de pieza de trabajo respectivos.
4. El aparato de las reivindicaciones 2 o 3, en el que el segmento de identificación del soporte de pieza de trabajo de tira codificadora incluye una configuración particular del soporte de pieza de trabajo.
5. El aparato de las reivindicaciones 2 o 3, en el que el segmento de identificación de pieza de trabajo de tira codificadora incluye una configuración particular de la pieza de trabajo.
6. El aparato de cualquiera de las reivindicaciones 1-5, en el que la señal de salida del controlador para el accionamiento indirecto por fricción que se hace funcionar para mover un soporte respectivo de pieza de trabajo a lo largo de la trayectoria de recorrido se determina mediante un programa almacenado en memoria.
7. El aparato de cualquiera de las reivindicaciones 1-5, en el que la señal de salida del controlador para detener el accionamiento indirecto por fricción que se hace funcionar para detener el movimiento de un soporte de pieza de trabajo respectivo a lo largo de la trayectoria de recorrido se determina mediante un programa almacenado en memoria.
8. El aparato de cualquiera de las reivindicaciones 1-7, en el que el sistema de transporte de bucle cerrado se hace funcionar para detener el soporte de pieza de trabajo en la estación de trabajo en una ubicación predeterminada en un intervalo de +/-0, 4 milímetros (mm) .
9. Un método para colocar soportes de piezas de trabajo (14, 18) con respecto a una estación de trabajo usando un aparato de acuerdo con una de las reivindicaciones 1 a 8 y que comprende las etapas de:
leer de manera operativa gracias a un lector codificador (30) situado en una posición fija en la estación de trabajo una tira codificadora (32) conectada a cada soporte de pieza de trabajo asociado con una configuración de pieza de trabajo soportada en el soporte de pieza de trabajo (14, 18) , incluyendo cada tira codificadora (32) un segmento de identificación y un segmento de información de colocación absoluta, estando el segmento de identificación colocado en ambos extremos exteriores de la tira codificadora, estando el segmento de ubicación absoluta colocado en el centro de la tira codificadora, incluyendo el segmento de identificación al menos uno del soporte de pieza de trabajo o de la información de identificación de configuración de la pieza de trabajo; transmitir una señal desde el lector codificador (30) a un controlador (28) ; transmitir una señal desde el controlador (28) a un accionamiento indirecto por fricción (22) para mover el soporte de pieza de trabajo (14, 18) respectivo a lo largo de la trayectoria de recorrido a través de la estación de trabajo;
mover el soporte de pieza de trabajo (14, 18) en al menos un carril a lo largo de la trayectoria de recorrido a través de la estación de trabajo; y detener con precisión cada soporte de pieza de trabajo en una única ubicación posicional deseada en la estación de trabajo o en una pluralidad deseada de ubicaciones posicionales en la estación de trabajo para mejorar la accesibilidad a diferentes ubicaciones de la pieza de trabajo soportada en respuesta a las respectivas señales recibidas desde el lector codificador (30) y el controlador (28) a través de un sistema de retroalimentación de bucle cerrado.
10. El método de la reivindicación 9, en el que la etapa de leer de manera operativa la tira codificadora comprende además:
leer el segmento de identificación para determinar una de la configuración del soporte de pieza de trabajo o de la configuración de la pieza de trabajo soportada mediante el soporte de pieza de trabajo.
11. El método de cualquiera de las reivindicaciones 9-10, en el que la etapa de leer de manera operativa la tira codificadora comprende además:
leer el segmento de colocación absoluta y transmitir la señal del lector codificador al controlador para determinar la posición relativa del soporte de pieza de trabajo en relación con el lector codificador.
12. El método de cualquiera de las reivindicaciones 9-11 que comprende además la etapa de comparar la señal codificadora transmitida con un valor almacenado en memoria para transmitir la señal desde el controlador al accionamiento indirecto por fricción para detener el movimiento del soporte de pieza de trabajo en la única ubicación posicional deseada y predeterminada o la pluralidad deseada de ubicaciones posicionales en la estación de trabajo.
13. El método de cualquiera de las reivindicaciones 9-12, en el que la etapa de detener con precisión el soporte de pieza de trabajo comprende detener el soporte de pieza de trabajo en un intervalo de +/-0, 4 milímetros (mm) desde la ubicación deseada en la estación de trabajo.
14. El método de cualquiera de las reivindicaciones 9-13, en el que la etapa de detener el soporte de pieza de trabajo comprende detener un primer tipo de configuración de soporte de pieza de trabajo en una primera ubicación en una estación de trabajo y un segundo tipo de configuración de soporte de pieza de trabajo en una segunda ubicación en la estación de trabajo, siendo la segunda ubicación de la estación de trabajo diferente de la primera ubicación de la estación de trabajo.
15. El método de cualquiera de las reivindicaciones 9-13, en el que la etapa de detener el soporte de pieza de trabajo comprende detener un primer tipo de configuración de pieza de trabajo en una primera ubicación en una estación de trabajo y un segundo tipo de configuración de pieza de trabajo en una segunda ubicación en la estación de trabajo, siendo la segunda ubicación de la estación de trabajo diferente de la primera ubicación de la estación de trabajo.
16. El método de cualquiera de las reivindicaciones 9 o 13-15, en el que la etapa de detener el soporte de pieza de trabajo en la única ubicación posicional deseada o pluralidad deseada de ubicaciones posicionales en la estación de trabajo se basa en la identificación de al menos una de la configuración del soporte de pieza de trabajo o de la configuración de la pieza de trabajo soportada.
Patentes similares o relacionadas:
LECTOR DE HUELLA PORTÁTIL, del 11 de Marzo de 2013, de GUZMAN NAVARRO, Francisco: 1. Lector de huella portátil, caracterizado porque comprende una carcasa que integra los siguientes dispositivos electrónicos e interfaces de conexión: - […]
DISPOSITIVO Y PROCEDIMIENTO PARA ALOJAR TARJETAS., del 1 de Marzo de 2007, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para alojar tarjetas , en particular para un tacógrafo en un vehículo automóvil, en ejecución plana, con una abertura de soporte para alojar una tarjeta […]
SISTEMA DE RECUPERACION Y TRANSPORTE DE RECIBOS PARA UNA MAQUINA AUTOMATICA DE SERVICIOS BANCARIOS., del 1 de Julio de 2005, de INTERBOLD: UN CAJERO AUTOMATICO INCLUYE UN APARATO DE TRANSPORTE Y RETRACCION DE RECIBOS . LA MAQUINA INCLUYE UNA IMPRESORA QUE ALIMENTA UNA HOJA , QUE […]
MECANISMO EYECTOR UNIVERSAL PARA UN APARATO DE CONEXION DE TARJETAS DE CI, del 16 de Noviembre de 1996, de MOLEX INCORPORATED: SE PRESENTA UN MECANISMO EYECTOR PARA EYECTAR UNA TARJETA DE CI DESDE UN ELEMENTO DE CONEXION DE CABEZAL ESTANCO Y QUE INCLUYE UN SOPORTE PARA EL EYECTOR EN […]
INSTALACION PARA ALOJAR UN ACUMULADOR DE DATOS TRANSPORTABLE, EN FORMA DE TARJETA O PLACA, del 16 de Febrero de 1995, de MANNESMANN KIENZLE GMBH (HR B1220): SE HA PRESENTADO UNA INSTALACION QUE SIRVE COMO ALOJAMIENTO PARA UN ACUMULADOR DE DATOS TRANSPORTABLE Y CON FORMA DE TARJETA O PLACA, Y QUE SE COLOCA […]
PROCEDIMIENTO DE CLASIFICACION DE UN FICHERO, SOPORTADO EN UNA CINTA, CASSETTE O DISCO., del 1 de Diciembre de 1978, de HEINZ JORGEN ZANDER THIELE LOPEZ DE SAAVEDRA,JUAN J.: Procedimiento de clasificación de un fichero soportado en una cinta, casete o disco, esencialmente caracterizado porque consiste en la clasificación en base a una característica […]
 MECANISMO DE TRANSPORTE DE TARJETAS Y METODO DE FUNCIONAMIENTO, del 16 de Noviembre de 2008, de CARD TECHNOLOGY CORPORATION: UN MECANISMO DE TRANSPORTE PARA EL TRANSPORTE DE TARJETAS A LO LARGO DE UNA RUTA DE TRANSPORTE Y UN METODO PARA LA UTILIZACION DEL MISMO. […]
MECANISMO DE TRANSPORTE DE TARJETAS Y METODO DE FUNCIONAMIENTO, del 16 de Noviembre de 2008, de CARD TECHNOLOGY CORPORATION: UN MECANISMO DE TRANSPORTE PARA EL TRANSPORTE DE TARJETAS A LO LARGO DE UNA RUTA DE TRANSPORTE Y UN METODO PARA LA UTILIZACION DEL MISMO. […]
Transferencia con control de contorno, del 29 de Julio de 2020, de JUNGHEINRICH AKTIENGESELLSCHAFT: Disposición para el control de contorno de palés que deben almacenarse en un sistema de estanterías, que comprende: una estación de transferencia […]