Supervisión continua de poblaciones y comportamiento de peces a escala de plataforma continental.
Un método de caracterizar una población de peces, que comprende las etapas de:
a. generar, dentro de un entorno acuático, señales acústicas dirigidas horizontalmente a través de modos deintercepción, en el que, al experimentar las señales pérdida de dispersión cilíndrica, las señales acústicas defrecuencias inferiores a 10kHz hacen que un pez disperse las señales acústicas esencialmente de formaomnidireccional;
b. recibir señales acústicas de rebote, estimuladas por las señales acústicas generadas; y
c. interpretar las señales acústicas de rebote con objeto de detectar y caracterizar la población de peces,comprendiendo la interpretación, determinar una intensidad dispersa medida de las señales acústicas de rebotedentro de una huella de resolución, establecer una potencia de la señal de rebote de los peces, y en función de ello,identificar los rebotes indicativos de una población de peces, en el que la potencia de la señal de rebote de los pecesse basa en una sección transversal de dispersión total de peces dentro de la huella de resolución, determinada pormedio de dividir los factores de fuente y transmisión por el cuadrado de la magnitud de la intensidad dispersamedida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/022143.
Solicitante: MASSACHUSETTS INSTITUTE OF TECHNOLOGY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 77 MASSACHUSETTS AVENUE CAMBRIDGE, MA 02139 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MAKRIS,NICHOLAS C, RATILAL,PURNIMA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S15/96 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › para la localización de peces.
PDF original: ES-2443033_T3.pdf
Fragmento de la descripción:
Supervisión continua de poblaciones y comportamiento de peces a escala de plataforma continental
Antecedentes de la invención La población de peces está disminuyendo en todo el mundo; sin embargo, los planteamientos convencionales a la hora de estudiar la abundancia y el comportamiento de los peces se basan en gran medida en equipos de sonar locales imprecisos y medidas consistentes en captura de arrastre. En concreto, la supervisión de peces en entornos de plataforma continental se ha realizado por medio de técnicas de recorridos de observación lineales realizadas desde barcos de investigación a baja velocidad; estas técnicas muestrean, de forma significativa, las poblaciones de peces en el tiempo y en el espacio, dejando una imagen incompleta de su abundancia y comportamiento. El sonar localizador de peces convencional (CFFS) opera en el rango 10-500 kHz y mide la distribución local de la profundidad de los de peces por medio del eco acústico dentro de un haz estrecho y dirigido hacia abajo a lo largo del recorrido de observación lineal de un barco de investigación a baja velocidad. Normalmente, los sistemas reconocen los hábitats a tasas próximas a los 0, 2 km2/hora, lo cual es similar a las tasas de reconocimiento de los barcos de captura de arrastre. Las tasas de los reconocimientos pueden aumentar aproximadamente un orden de magnitud con un sonar convencional de exploración lateral que aprovecha sólo los trayectos de propagación locales, lineales y acuáticos. En cambio, los bancos aislados de peces están a menudo bastante separados en el espacio y son difíciles de detectar por métodos convencionales. Los bancos pequeños que ocupan cientos de metros en diámetro son conocidos por experimentar una rápida variación en tamaño y forma. Los bancos más grandes a menudo se extienden entre decenas y centenas de kilómetros cuadrados y pueden también sufrir cambios morfológicos drásticos, incluyendo fragmentación y apiñamiento, en periodos inferiores a una hora.
Por lo tanto, la medición del tamaño, distribución especial y evolución temporal de los bancos de peces suele no resultar práctica con los métodos convencionales. Los peces están demasiado dispersos y durante el curso de una medición utilizando CFFS, sus concentraciones y distribuciones espaciales cambian de forma drástica.
Resumen de la invención La presente invención permite que la densidad de población de área y el comportamiento detallado de los bancos de peces y su interacción sean supervisados de forma continua en intervalos cortos (por ejemplo, de aproximadamente un minuto) en áreas a escala de plataforma continental que abarcan miles de kilómetros cuadrados por medio de sensores oceánicos a distancia de guías de ondas acústicas. Esto es posible porque la presente invención se basa en la capacidad de ciertos entornos geofísicos, tales como plataformas continentales, islas, etc., de actuar como guías de ondas acústicas en las que el sonido se propaga largos tramos por medio de modos de intercepción que sufren sólo pérdida de dispersión cilíndrica, en lugar de la pérdida esférica que se experimenta en la transmisión CFFS. La invención puede también ser utilizada en aguas profundas alejadas de las plataformas continentales basándose en variaciones en la velocidad del sonido de la columna de agua para generar un guía de ondas.
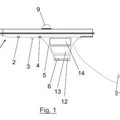
Para formar una imagen instantánea de acuerdo con la invención, los modos de guías de ondas pueden ser estimulados uniformemente en acimut por medio de una estructura vertical de fuentes que emplean un transmisor de banda ancha preferiblemente corta. Se reciben entonces de forma continua rebotes dispersos de las condiciones ambiente por medio de una estructura lineal horizontal y dispuesta en intervalos y apoyos horizontales (por ejemplo, por medio de un filtrado y formación de haces temporales apareados) . La imagen resultante es una instantánea del entorno oceánico sobre los tiempos de viaje en los dos sentidos de los rebotes de la señal. La invención es útil para localizar e identificar peces con y sin vejigas natatorias y puede ser aplicada para detectar, obtener imágenes de, y localizar criaturas marinas tales como los camarones.
De acuerdo con ella, en un primer aspecto, la invención describe un método de identificar una población de peces como se define en la reivindicación 1. El método comprende generar, dentro de un entorno acuático, señales acústicas dirigidas horizontalmente por medio de modos de intercepción por lo que las señales sufren eventualmente pérdidas de dispersión cilíndrica; recibir señales acústicas de rebote estimuladas o excitadas por las señales acústicas generadas; e interpretar la señales acústicas de rebote con objeto de detectar e identificar la población de peces. En algunas realizaciones, las señales acústicas son pulsadas. Preferiblemente, las señales acústicas generadas son uniformes en acimut y se propagan dentro de medios geofísicos limitados que actúan como guías de ondas, tales como el fondo del mar y la superficie océano-atmosférica. Las guías de ondas pueden también originarse por las variaciones en la velocidad del sonido de la columna de agua.
La etapa de interpretación comprende preferiblemente filtrado y formación de haces temporales apareados; este procedimiento presenta gráficamente las intensidades de rebote de la señal acústica a la posición espacial horizontal de la característica de dispersión que retornó de ellas, formando por tanto una imagen de las intensidades acústicas de rebote. La etapa puede también incluir compensar la pérdida de transmisión de la guía de ondas en los dos sentidos, la huella de resolución, la potencia de la señal de rebote de los peces y la potencia de la fuente. En algunas realizaciones, la etapa de interpretación comprende establecer una potencia de la señal de rebote de los peces, y en función de ella, identificar las señales de rebote indicativas de poblaciones de peces. Esto puede suponer el establecer la potencia de la señal de rebote de diferentes especies de peces y distinguir entre distintas
poblaciones de peces basándose en las potencias de rebote establecidas y establecer la densidad de población de área de los grupos de peces. En algunas realizaciones, la etapa de interpretación puede también implicar la transformación logarítmica de las intensidades de la señal acústica de rebote para convertir el ruido nieve dependiente de la señal de rebote en ruido aditivo independiente de la señal de rebote, optimizando por lo tanto el reconocimiento de patrones de potencia de la señal de rebote de los peces o distribuciones de la población.
La caracterización normalmente (aunque no necesariamente) se produce en una zona que tiene un área superior a los 25 km2. Las señales acústicas generadas se propagan de la manera deseada y las señales acústicas de rebote cubren, 360 grados en acimut. Pueden ser generadas desde una estructura orientada verticalmente de fuentes acústicas dispuestas dentro del entorno acuático. Puede utilizarse una apertura horizontal en la estructura de fuente para dirigir las señales acústicas generadas según ciertos grados de acimut preferidos en algunas realizaciones.
Pueden adoptarse medidas para optimizar la longitud de onda de las señales acústicas. Por ejemplo, la longitud de onda optimizada puede ser lo bastante grande como para que las señales acústicas de rebote sean expresadas como el producto de (i) un factor que representa la transmisión a unos peces, (ii) un factor que representa la dispersión desde los peces y (iii) un factor que representa la transmisión desde los peces. La longitud de onda optimizada puede ser tal que un rango de campo lejano de las señales acústicas, sea más corto que el espacio medio entre peces para que sea caracterizado. En algunas realizaciones, la longitud de onda optimizada es tal que una longitud de la sombra del pez, para ser caracterizada, sea más pequeña que la distancia media entre los peces. La longitud de onda optimizada puede elegirse de forma que las señales acústicas de rebote sean independientes del aspecto de cualquier pez individual. La longitud de onda optimizada puede elegirse de forma que la atenuación acústica total causada por la dispersión de la guía de onda (muchos ángulos de incidencia dentro y fuera) desde el pez o grupos de peces sea menor que 1 dB. (Los sistemas CFFS normalmente operan a una frecuencia mucho más alta y pueden experimentar una atenuación significativa al propagarse incluso a través de pequeños bancos de peces, lo que conduce a errores importantes en la estimación de la población.) La longitud de onda optimizada y el nivel de potencia de la señal acústica pueden ser elegidos de tal forma que las señales acústicas... [Seguir leyendo]
Reivindicaciones:
1. Un método de caracterizar una población de peces, que comprende las etapas de:
a. generar, dentro de un entorno acuático, señales acústicas dirigidas horizontalmente a través de modos de intercepción, en el que, al experimentar las señales pérdida de dispersión cilíndrica, las señales acústicas de frecuencias inferiores a 10kHz hacen que un pez disperse las señales acústicas esencialmente de forma omnidireccional;
b. recibir señales acústicas de rebote, estimuladas por las señales acústicas generadas; y
c. interpretar las señales acústicas de rebote con objeto de detectar y caracterizar la población de peces, comprendiendo la interpretación, determinar una intensidad dispersa medida de las señales acústicas de rebote dentro de una huella de resolución, establecer una potencia de la señal de rebote de los peces, y en función de ello, identificar los rebotes indicativos de una población de peces, en el que la potencia de la señal de rebote de los peces se basa en una sección transversal de dispersión total de peces dentro de la huella de resolución, determinada por medio de dividir los factores de fuente y transmisión por el cuadrado de la magnitud de la intensidad dispersa medida.
2. El método según la reivindicación 1 en el que la interpretación comprende además identificar una especie de peces a partir de una dependencia de la frecuencia de la potencia de la señal de rebote.
3. El método según la reivindicación 1 en el que las señales acústicas generadas se propagan dentro de las características geofísicas limitantes que actúan como una guía de ondas.
4. El método según la reivindicación 1 en el que las señales acústicas generadas se propagan dentro de una guía de ondas producida por variaciones en la velocidad del sonido en la columna de agua. .
5. El método según la reivindicación 1 en el que la caracterización se produce en una región que sobrepasa los 25 km2 en un minuto.
6. El método según la reivindicación 1 en el que las señales acústicas de propagan, y las señales acústicas de rebote abarcan, 360 grados en acimut.
7. El método según la reivindicación 1 en el que las señales acústicas generadas se generan a partir de una estructura de fuentes acústicas orientadas dispuestas verticalmente dentro del entorno acuático.
8. El método según la reivindicación 1 en el que las señales acústicas generadas son uniformes en sentido acimutal.
9. El método según la reivindicación 1 en el que las señales acústicas generadas son pulsadas.
10. El método según la reivindicación 1 en el que la etapa de interpretación comprende un filtrado y una formación de haces temporales apareados.
11. El método según la reivindicación 1 en el que la etapa de interpretación comprende compensar al menos una de entre las siguientes, pérdida de transmisión bidireccional de la guía de ondas, huella de resolución, potencia de la señal de rebote de los peces, potencia de la fuente y fluctuaciones estadísticas de propagación y dispersión de la guía de ondas.
12. El método según la reivindicación 1 en el que la etapa de interpretación comprende (i) establecer potencias de rebote de diferentes especies de peces y (ii) distinguir entre diferentes poblaciones de peces basándose en las potencias de rebote establecidas.
13. El método según la reivindicación 1 que además comprende la etapa de seleccionar una longitud de onda optimizada de las señales acústicas generadas.
14. El método según la reivindicación 13 en el que la longitud de onda optimizada es una longitud de onda seleccionada por ser lo bastante grande para permitir que las señales acústicas de rebote de cualquier pez en concreto, de los peces que van a ser caracterizados, puedan ser expresadas como el producto de (i) un factor que representa la transmisión de la guía de ondas hacia los peces, (ii) un factor que representa la dispersión de los peces, y (iii) un factor que representa la transmisión de la guía de ondas desde los peces.
15. El método según la reivindicación 13 en el que la longitud de onda optimizada, λ, se selecciona de tal forma, que un rango de campo lejano de las señales acústicas generadas, L2/λdonde L es la escala longitudinal del dispersor dominante dentro de un pez, que puede ser el pez entero o la vejiga natatoria del pez, es más reducido que un espaciamiento medio entre los peces que van a ser caracterizados.
16. El método según la reivindicación 13 en el que las señales acústicas son generadas con una longitud de onda optimizada y un nivel de potencia tales que las señales acústicas de rebote desde el pez superan un nivel de ruido ambiente en un rango máximo de detección de al menos 5 dB.
17. El método según la reivindicación 1 que comprende además la etapa de generar imágenes de la población de peces basándose en las señales acústicas de rebote.
18. El método según la reivindicación 17 en el que la etapa de generar imágenes comprende la concatenación de imágenes sucesivas formando una película.
19. El método según la reivindicación 17 que además comprende la etapa de caracterizar un área total ocupada por la población de peces detectada, determinando el número de píxeles en una imagen y multiplicándolo por el área de píxeles.
20. El método según la reivindicación 19 que además comprende identificar un centro de la población de peces detectada, encontrando el primer momento del vector de posición horizontal con respecto a la densidad de población de peces que varía espacialmente dentro de la población de peces detectada.
21. El método según la reivindicación 20 que además comprende detectar la velocidad de la población de peces diferenciando con respecto al tiempo el centro identificado de la población.
22. El método según la reivindicación 20 que además comprende determinar los vectores de velocidad de un campo diferenciando con respecto al tiempo y al espacio siguiendo la conservación de masas.
23. El método según la reivindicación 20 que además comprende cuantificar las presiones ambiente en los peces que les hacen que se desplacen siguiendo la conservación del momento.
24. El método según la reivindicación 19 que además comprende caracterizar una población total de peces dentro del área.
25. El método según la reivindicación 17 en el que la etapa de interpretar comprende realizar transformaciones logarítmicas de las intensidades de las señales acústicas de rebote para convertir el ruido nieve dependiente de la señal de rebote, en ruido aditivo independiente de la señal de rebote y filtrar las intensidades transformadas utilizando filtrado de correlación o coincidencia para identificar patrones de potencias de rebote de peces o distribuciones de población.
26. El método según la reivindicación 13 en el que la longitud de onda optimizada se selecciona de forma que la atenuación acústica total causada por la dispersión de la guía de ondas del pez o grupos de peces es inferior a 1 dB.
27. El método según la reivindicación 1 que comprende la etapa de estimar una velocidad de un banco de peces basándose en un desplazamiento de frecuencia de efecto Doppler de las señales acústicas de rebote.
28. El método según la reivindicación 1 en el que generar las señales acústicas comprende estimular modos de guía de ondas para maximizar las señales acústicas de rebote de los peces y para minimizar las señales acústicas de rebote del fondo marino.
29. Aparato para caracterizar una población de peces, que comprende:
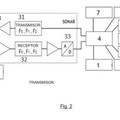
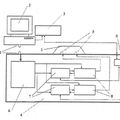
a. un dispositivo transmisor (215) para generar, dentro de un entorno acuático, señales acústicas dirigidas horizontalmente por medio de modos de intercepción en los que las señales experimentan pérdida de dispersión cilíndrica, teniendo las señales acústicas frecuencias por debajo de 10kHz que hacen que un pez disperse las señales acústicas sustancialmente de forma omnidireccional;
b. un receptor (225) para recibir las señales acústicas de rebote, estimuladas por las señales acústicas generadas; y
c. un módulo analizador (320) para interpretar las señales acústicas de rebote así como para detectar y caracterizar la población de peces, comprendiendo la interpretación, determinar una intensidad medida de dispersión de las señales acústicas de rebote dentro de una huella de resolución, estableciendo una potencia de la señal de rebote de los peces y, basándose de ello, identificar las señales de rebote indicativas de población de peces,
en el que la potencia de la señal de rebote de los peces se basa en una sección transversal total de dispersión dentro de la huella de resolución, determinada por dividir los factores de fuente y transmisión por el cuadrado de la magnitud de la intensidad dispersa medida.
30. El aparato según la reivindicación 29 en el que el dispositivo transmisor (215) está configurado para generar las señales acústicas de acuerdo con el método de cualquiera de las reivindicaciones 8, 9, 13-16, 26 y 28.
31. El aparato según la reivindicación 29 en el que el módulo analizador (320) está configurado para interpretar las señales acústicas de rebote de acuerdo con el método de cualquiera de las reivindicaciones 2, 10-12, 19-21, 24, 25 y 27.
32. El aparato según la reivindicación 29 que además comprende un módulo de tratamiento de imágenes (330) 5 configurado para generar imágenes de acuerdo con el método de la reivindicación 17 o de la reivindicación 18.
33. El aparato según la reivindicación 29 en el que el dispositivo transmisor (215) genera señales acústicas que se propagan 360 grados en acimut.
34. El aparato según la reivindicación 29 en el que el dispositivo según (215) comprende una estructura orientada vertical de fuentes acústicas. .
35. El aparato según la reivindicación 29 en el que el módulo analizador (320) está configurado para caracterizar una población total de peces en un área determinada y las variaciones de la población caracterizada en el tiempo, como series por tiempos de poblaciones de peces dentro de un rango de densidad de población de área.
36. El aparato según la reivindicación 29 en el que el módulo analizador (320) está configurado para caracterizar un espectro temporal de series por tiempos de poblaciones de peces y una escala en el tiempo de auto correlación de 15 fluctuaciones de la población.
37. El aparato según la reivindicación 32 en el que el módulo de tratamiento de imágenes (330) está configurado para establecer un espectro espacial bidimensional de la población de peces y una escala de correlación espacial de un centro de población de peces.
38. El aparato según la reivindicación 32 en el que el módulo de tratamiento de imágenes (330) está configurado
para determinar series por tiempos de la morfología de un grupo de peces por medio de la determinación de sus ejes mayor y menor.
39. El aparato según la reivindicación 32 en el que el módulo de tratamiento de imágenes (330) está configurado para reducir una varianza de cada píxel promediando muestras independientes temporales o espaciales de una intensidad de la señal acústica recibida proporcional al número de muestras del promedio.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA LA DETERMINACIÓN DE BIOMASA DE ATUNES EN UNA ZONA DE AGUA Y SISTEMA CORRESPONDIENTE, del 26 de Abril de 2018, de BALFEGÓ & BALFEGÓ S.L: Procedimiento para la determinación de biomasa de atunes en una zona de agua y sistema correspondiente. Se disponen sumergidos bajo dicha zona de agua unos medios de […]
 Artefacto de búsqueda y agregación de peces, del 10 de Febrero de 2015, de MARINE INSTRUMENTS, S.A: La invención se refiere a un artefacto no tripulado, navegable autopropulsado para detectar y agregar bancos de peces, que de forma autónoma navega siguiendo una estrategia […]
Artefacto de búsqueda y agregación de peces, del 10 de Febrero de 2015, de MARINE INSTRUMENTS, S.A: La invención se refiere a un artefacto no tripulado, navegable autopropulsado para detectar y agregar bancos de peces, que de forma autónoma navega siguiendo una estrategia […]
 Boya para detección de peces, del 11 de Abril de 2014, de MARINE INSTRUMENTS, S.A: La invención se refiere a una boya para detectar peces que comprende un sónar configurado para emitir y recibir señales eléctricas, un transductor piezoeléctrico […]
Boya para detección de peces, del 11 de Abril de 2014, de MARINE INSTRUMENTS, S.A: La invención se refiere a una boya para detectar peces que comprende un sónar configurado para emitir y recibir señales eléctricas, un transductor piezoeléctrico […]
 Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
 Boya para detección de biomasa, del 20 de Julio de 2012, de ZUNIBAL, S.L.: Boya para detección de biomasa formada por una carcasa y una tapa , ambas preferentemente de material plástico, alojándose en el interior un microprocesador […]
Boya para detección de biomasa, del 20 de Julio de 2012, de ZUNIBAL, S.L.: Boya para detección de biomasa formada por una carcasa y una tapa , ambas preferentemente de material plástico, alojándose en el interior un microprocesador […]
 ADICION A LA PATENTE N. P-9900019: BOYA PARA LA PESCA CON OBJETO, del 17 de Diciembre de 2009, de ZUNIBAL, S.L.: Adición a la Patente nº P-9900019: Boya para la pesca con objeto.
La boya para la pesca con objeto está formada por dos troncos de cono invertidos de diferentes tamaños […]
ADICION A LA PATENTE N. P-9900019: BOYA PARA LA PESCA CON OBJETO, del 17 de Diciembre de 2009, de ZUNIBAL, S.L.: Adición a la Patente nº P-9900019: Boya para la pesca con objeto.
La boya para la pesca con objeto está formada por dos troncos de cono invertidos de diferentes tamaños […]
 SONAR DE RED, del 1 de Enero de 2009, de ZUNIBAL, S.L.: El sonar de red consta de 3 partes unidas entre sí mediante cables de datos. La primera consta de ordenador y caja de interfaz, y se encuentra en el puente. La segunda […]
SONAR DE RED, del 1 de Enero de 2009, de ZUNIBAL, S.L.: El sonar de red consta de 3 partes unidas entre sí mediante cables de datos. La primera consta de ordenador y caja de interfaz, y se encuentra en el puente. La segunda […]
 PERFECCIONAMIENTOS EN LOS APARATOS DETECTORES DE BANCOS DE PESCA, del 16 de Abril de 1961, de NAVERAD, SOCIEDAD ANÓNIMA: Perfeccionamientos en aparatos detectores de bancos de pesca, caracterizados porque el sistemas de emisión se halla realizado por dos válvulas pentodos en montaje oscilador-amplificador […]
PERFECCIONAMIENTOS EN LOS APARATOS DETECTORES DE BANCOS DE PESCA, del 16 de Abril de 1961, de NAVERAD, SOCIEDAD ANÓNIMA: Perfeccionamientos en aparatos detectores de bancos de pesca, caracterizados porque el sistemas de emisión se halla realizado por dos válvulas pentodos en montaje oscilador-amplificador […]