Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua.
Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y una señal activa reflejada desde el objeto,
comprendiendo elaparato:
- una rama de modo activo que presenta una entrada para recibir una primera señal representativa de la señalactiva,
- una rama de modo pasivo que presenta una entrada para recibir una segunda señal representativa de laseñal pasiva, caracterizado porque
- la rama de modo activo incluye unos primeros medios de procesamiento de señal adaptados para generaruna primera salida de estimación de clasificación (7), con unas primeras pistas de la clase más probable deobjetivo para el objeto, y
- la rama de modo pasivo incluye unos segundos medios de procesamiento de señal adaptados para generaruna segunda salida de estimación de clasificación (15), con unas segundas pistas de la clase más probablede objetivo para el objeto,
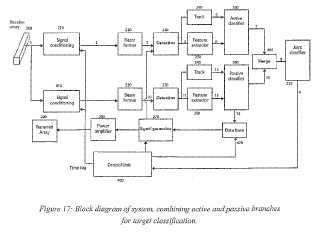
- un elemento de fusión (400) adaptado para recibir y fusionar dichas primera y segunda salidas de estimaciónde clasificación (7, 15), y para emitir una salida de estimación de clasificación fusionada (8) con pistas,
- un clasificador (410) dispuesto para recibir dicha salida de estimación de clasificación fusionada (8) conpistas, y adaptado para clasificar el objeto realizando la clasificación, basándose en dicha salida deestimación de clasificación fusionada (8) con pistas, y un controlador (430) adaptado para cambiar el modode funcionamiento del aparato, basándose en el resultado de la clasificación en dicho clasificador (410).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NO2009/000209.
Solicitante: Kongsberg Defence & Aerospace AS.
Nacionalidad solicitante: Noruega.
Dirección: Kirkegardsveien 45 3616 Kongsberg NORUEGA.
Inventor/es: LØVIK,ARNE, KNUDSEN,TOR, STEIG,LEIV INGE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S15/87 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Combinaciones de sistemas de sonar.
- G01S15/96 G01S 15/00 […] › para la localización de peces.
- G01S7/52 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › de sistemas de acuerdo con el grupo G01S 15/00.
- G01S7/539 G01S 7/00 […] › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
PDF original: ES-2398340_T3.pdf
Fragmento de la descripción:
Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua.
La invención se refiere a un aparato y un procedimiento que se basan en un uso combinado de tecnología de sónar activo y pasivo que puede usarse ventajosamente para la vigilancia de puertos o protección de flotas. Los temas comentados en la descripción son la advertencia, detección y clasificación tempranas con respecto a objetivos pequeños típicos tales como submarinistas, UUV y otros. Son posibles combinaciones en el nivel de detección dando dos detecciones que van a combinarse, o para la clasificación, por separado, y a continuación fusionarse, o en un proceso de clasificación conjunta. Las consideraciones teóricas están soportadas por los resultados experimentales de un sónar activo/pasivo combinado novedoso. El sónar experimental usa señales activas de banda ancha en el intervalo 15-25 kHz, y un proceso pasivo simultáneo sobre la banda de 1-15 kHz. Se dan a conocer resultados a partir de la detección y clasificación tanto de peces, como de submarinistas y UUV, dando importancia a la mejora que puede conseguirse de este modo en el rendimiento.
1. Introducción La atención en aumento en la seguridad para instalaciones fijas y los propios barcos en situaciones fuera de zona ha conducido al desarrollo y lanzamiento de sistemas de protección tanto fuera del agua como submarinos. Esta descripción se centrará en esto último teniendo en cuenta que la información de la situación anterior en el agua puede resultar útil en el proceso de reducción de falsas alarmas.
El trabajo presentado aquí tiene tres aspectos: una parte son sistemas de sónar para aguas confinadas, con el fin de detectar objetivos pequeños y difíciles en entornos difíciles, en segundo lugar disponer de vehículos submarinos para contramedidas de inspección, vigilancia y emisión y finalmente la integración de sensores, la fusión de datos y el funcionamiento de sónar global.
La capacidad de protección frente a intrusos se compone de estos elementos, la habilidad para detectar y clasificar y la habilidad para reaccionar. La integración de estas capacidades en una unidad de mando y control es esencial para la capacidad de sistema total.
El documento WO 2007/127271 A2, que se usa para la delimitación de forma en dos partes de las reivindicaciones independientes, describe un sistema de sónar 3D con sónar combinado que usa una parte pasiva para la clasificación de objetos y la determinación de dirección y una parte activa para hallar una dirección. La presente invención también usa sistemas de sónar pasivo y activo, pero en los que los resultados de clasificación a partir de estos sistemas se fusionan proporcionando por tanto una clasificación conjunta para obtener una tasa inferior de falsas alarmas.
La presente invención se define por un aparato con un modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido a partir de una señal pasiva generada por el objeto y una señal activa reflejada desde el objeto. El aparato comprende:
- una rama de modo activo que presenta una entrada para recibir una primera señal representativa de la señal activa,
- una rama de modo pasivo que presenta una entrada para recibir una segunda señal representativa de la señal pasiva, y estando caracterizado el aparato porque
- la rama de modo activo incluye unos primeros medios de procesamiento de señal adaptados para generar una primera salida de estimación de clasificación, con primeras pistas de la clase más probable de objetivo para el objeto, y
- la rama de modo pasivo incluye unos segundos medios de procesamiento de señal adaptados para generar una segunda salida de estimación de clasificación, con segundas pistas de la clase más probable de objetivo para el objeto,
- un elemento de fusión adaptado para recibir y fusionar dichas salidas de estimación de clasificación primera y segunda, y para emitir una salida de estimación de clasificación fusionada con pistas,
- un clasificador dispuesto para recibir dicha salida de estimación de clasificación fusionada con pistas, y adaptado para clasificar el objeto realizando la clasificación basándose en dicha salida de estimación de clasificación fusionada con pistas, y un controlador adaptado para cambiar el modo de funcionamiento del aparato basándose en el resultado de la clasificación en dicho clasificador.
Se definen características adicionales del aparato en las reivindicaciones dependientes adjuntas.
La invención se define también por un procedimiento para la detección y clasificación de un objeto móvil sumergido a partir de una señal pasiva generada por el objeto y una señal activa reflejada desde el objeto, comprendiendo el procedimiento:
- recibir en una entrada de una rama de modo activo una primera señal representativa de la señal activa,
- recibir en una entrada de una rama de modo pasivo una segunda señal representativa de la señal pasiva, y estando caracterizado el procedimiento por
- procesar en la rama de modo activo una primera señal para generar una primera salida de estimación de clasificación, con primeras pistas de la clase más probable de objetivo para el objeto,
- procesar en la rama de modo pasivo una segunda señal para generar una segunda salida de estimación de clasificación, con segundas pistas de la clase más probable de objetivo para el objeto,
- recibir dichas salidas de estimación de clasificación primera y segunda en un elemento de fusión y generar una salida de estimación de clasificación fusionada con pistas,
- recibir dicha salida de estimación de clasificación fusionada con pistas en un clasificador, y clasificar el objeto realizando la clasificación basándose en dicha una salida de estimación de clasificación fusionada con pistas, y
- cambiar el modo de funcionamiento del aparato, por medio de un controlador (430) , basándose en el resultado de la clasificación en dicho clasificador (410) . Se definen características adicionales del procedimiento inventivo en las reivindicaciones dependientes adjuntas.
En la descripción, se hace referencia a los siguientes dibujos: la figura 1 muestra una gráfica que ilustra tiempos de recorrido típicos como una función de la distancia para diferentes posibles amenazas;
la figura 2 muestra una gráfica que ilustra la atenuación bidireccional como una función del alcance para las
frecuencias 20 kHz, 40 kHz y 100 kHz. (Francois y Garrison JASA 72 sept. 82, JASA 72 dic. 82) ; la figura 3 muestra un diagrama de bloques de una cadena de procesamiento de señal propuesta por la presente invención;
las figuras 4 A, B y C muestran gráficas que ilustran, mediante representaciones de tiempo frente a demora, el resultado de la aplicación de diversas rutinas de modelación de haz: A: Modelación de haz convencional; B: Modelación de haz adaptativa ; C: Modelación de haz de subespacio;
la figura 5 muestra una gráfica que ilustra un espectrograma normalizado típico de un UUV como una función de tiempo; la figura 6 muestra una gráfica que ilustra la señal acústica grabada de un submarinista en movimiento, a 100 kHz, representada en demora frente a nivel, y que indica los componentes de señal mediante la fuente;
la figura 7 muestra una gráfica que ilustra en una representación de alcance-demora un submarinista con equipo
autónomo que se mueve hacia la izquierda; la figura 8 muestra una gráfica que ilustra una representación de alcance-demora que contiene bancos de caballa;
la figura 9 muestra una gráfica que ilustra en una representación de alcance-demora una RIB;
la figura 10 muestra dos gráficas que ilustran el factor K para objetivos desconocidos y para amenazas de submarinistas; la figura 11 muestra una gráfica 3D que ilustra grupos de objetivo con pistas de clasificación; la figura 12 muestra un boceto para ilustrar un ejemplo de un escenario general, con objetivos; la figura 13 muestra tres gráficas que ilustran valores de K para objetivos típicos, “submarinista”, “pez” y
“mamífero marino”, respectivamente;
la figura 14 muestra dos gráficas que ilustran niveles de ruido para objetivos típicos; en la gráfica izquierda peces, mamíferos marinos o un submarinista; en la gráfica derecha UUV o un submarinista asistido;
la figura 15 muestra gráficas que ilustran frecuencias características de una realización ventajosa de señales de sonido de biosónar;
la figura 16 muestra un boceto para ilustrar, usando un ejemplo de un escenario general, con objetivos, un... [Seguir leyendo]
Reivindicaciones:
1. Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido a partir de una señal pasiva generada por el objeto y una señal activa reflejada desde el objeto, comprendiendo el aparato:
- una rama de modo activo que presenta una entrada para recibir una primera señal representativa de la señal activa,
- una rama de modo pasivo que presenta una entrada para recibir una segunda señal representativa de la señal pasiva, caracterizado porque
- la rama de modo activo incluye unos primeros medios de procesamiento de señal adaptados para generar una primera salida de estimación de clasificación (7) , con unas primeras pistas de la clase más probable de objetivo para el objeto, y
- la rama de modo pasivo incluye unos segundos medios de procesamiento de señal adaptados para generar una segunda salida de estimación de clasificación (15) , con unas segundas pistas de la clase más probable de objetivo para el objeto,
- un elemento de fusión (400) adaptado para recibir y fusionar dichas primera y segunda salidas de estimación de clasificación (7, 15) , y para emitir una salida de estimación de clasificación fusionada (8) con pistas,
- un clasificador (410) dispuesto para recibir dicha salida de estimación de clasificación fusionada (8) con pistas, y adaptado para clasificar el objeto realizando la clasificación, basándose en dicha salida de estimación de clasificación fusionada (8) con pistas, y un controlador (430) adaptado para cambiar el modo de funcionamiento del aparato, basándose en el resultado de la clasificación en dicho clasificador (410) .
2. Aparato según la reivindicación 1, caracterizado porque comprende además unos medios de generación de sonido (270) controlados mediante dicho controlador (430) y adaptados para generar una señal de sonido según el resultado de la clasificación.
3. Aparato según la reivindicación 1, caracterizado porque comprende además una unidad de detección (230) controlada mediante dicho controlador (430) y adaptada para correlacionar una señal de salida proporcionada por un formador de haz (220) según el resultado de la clasificación.
4. Aparato según la reivindicación 1, caracterizado porque los segundos medios de procesamiento de señal de la rama de modo pasivo están adaptados para generar una segunda salida de estimación de clasificación como un indicador de clasificación para indicar la clasificación de objeto de al menos uno de entre una criatura marina, un submarinista, un submarinista asistido y un vehículo submarino.
5. Aparato según la reivindicación 1, caracterizado porque comprende unos medios de generación de señal de sonido (270) controlados mediante dicho controlador (430) y adaptados para generar una señal de sonido, en el que el sonido que se genera corresponde a un sonido natural de al menos una criatura marina, incluyendo un mamífero marino, cuando se cambia el modo de funcionamiento y se clasifica dicha criatura marina.
6. Aparato según la reivindicación 2, caracterizado porque los medios de generación de señal de sonido (270) incluyen unos medios de almacenamiento dispuestos para almacenar datos o señales para hacer que el generador genere la señal de sonido.
7. Aparato según la reivindicación 6, caracterizado porque los medios de almacenamiento están dispuestos para responder a una salida de un medios clasificadores de los medios de procesamiento de rama de la rama pasiva o el clasificador conjunto que indica una clasificación positiva del objeto, para almacenar una señal recibida en al menos una de entre las ramas activa y pasiva dispuestas para almacenar dichos datos o señal eficaces para que el generador genere la señal de sonido.
8. Aparato según la reivindicación 2, caracterizado porque los medios de generación de señal de sonido (270) están adaptados para almacenar y reproducir una grabación de sonido de mamífero marino de al menos uno de entre un sonido natural de una foca en una banda de frecuencia comprendida entre 180 Hz y 9000 Hz, un sonido natural de un cetáceo dentado en una banda de frecuencia comprendida entre 2000 Hz y 60000 Hz, y un sonido natural de un cetáceo barbado en una banda de frecuencia comprendida entre 40 Hz y 1000 Hz.
9. Procedimiento para la detección y clasificación de un objeto móvil sumergido a partir de una señal pasiva generada por el objeto y una señal activa reflejada desde el objeto, comprendiendo el procedimiento:
-recibir en una entrada de una rama de modo activo una primera señal representativa de la señal activa,
- recibir en una entrada de una rama de modo pasivo una segunda señal representativa de la señal pasiva, caracterizado porque comprende
- procesar en la rama de modo activo una primera señal para generar una primera salida de estimación de clasificación (7) , con unas primeras pistas de la clase más probable de objetivo para el objeto,
- procesar en la rama de modo pasivo una segunda señal para generar una segunda salida de estimación de
clasificación (15) , con unas segundas pistas de la clase más probable de objetivo para el objeto, 10
- recibir dicha primera y segunda salidas de estimación de clasificación (7, 15) en un elemento de fusión (400) y generar una salida de estimación de clasificación fusionada (8) con pistas,
- recibir dicha salida de estimación de clasificación fusionada (8) con pistas en un clasificador (410) , y clasificar
el objeto realizando la clasificación basándose en dicha salida de estimación de clasificación fusionada (8) con pistas, y
- cambiar el modo de funcionamiento del aparato, por medio de un controlador (430) , basándose en el
resultado de la clasificación en dicho clasificador (410) . 20
10. Procedimiento según la reivindicación 9, caracterizado porque comprende además generar una señal de sonido según el resultado de la clasificación.
11. Procedimiento según la reivindicación 9, caracterizado porque comprende además correlacionar, en una unidad
de detección (230) controlada mediante dicho controlador (430) , una señal de salida de un formador de haz (220) según el resultado de la clasificación.
12. Procedimiento según la reivindicación 9, caracterizado porque comprende además generar, en los segundos medios de procesamiento de señal de la rama de modo pasivo, una segunda salida de estimación de clasificación como un indicador de clasificación para indicar la clasificación de objeto de al menos uno de una criatura marina, un submarinista, un submarinista asistido y un vehículo submarino.
13. Procedimiento según la reivindicación 9, caracterizado porque comprende además generar una señal de sonido correspondiente a una criatura marina, incluyendo un mamífero, cuando se cambia el modo de funcionamiento y se 35 clasifica dicha criatura marina.
14. Procedimiento según la reivindicación 10, caracterizado porque comprende además almacenar datos o señales que hacen que el generador (270) genere la señal de sonido.
15. Procedimiento según la reivindicación 14, caracterizado porque los medios de almacenamiento responden a una salida de unos medios clasificadores de los medios de procesamiento de rama de la rama pasiva o el clasificador conjunto que indica una clasificación positiva del objeto, y almacenan una señal recibida en al menos una de las ramas activa y pasiva dispuestas para almacenar dichos datos o señal eficaces para que el generador (270) genere la señal de sonido, en el que la señal de sonido generada se almacena para reproducir una grabación de sonido de 45 mamífero marino de al menos uno de entre un sonido natural de una foca en una banda de frecuencia comprendida entre 180 Hz y 9000 Hz, un sonido natural de un cetáceo dentado en una banda de frecuencia comprendida entre 2000 Hz y 60000 Hz, y un sonido natural de un cetáceo barbado en una banda de frecuencia comprendida entre 40 Hz y 1000 Hz.
Patentes similares o relacionadas:
Sistema y procedimiento para la detección de blancos, del 23 de Noviembre de 2018, de Universiteit Antwerpen: Un sensor basado en sónar adaptado para la localización de un blanco en el aire, el sensor que comprende: - un emisor de banda ancha o ultraancha que emite […]
Arquitectura de un sistema multiestático acústico, del 28 de Diciembre de 2016, de THALES: Sistema acústico que consta al menos de una base emisora que consta de unos medios de emisión de un pulso sonar y de al menos […]
 Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor, del 27 de Agosto de 2014, de AUDI AG: Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo […]
Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor, del 27 de Agosto de 2014, de AUDI AG: Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo […]
 Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 22 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene […]
 DISPOSITIVO PARA DETECTAR UN OBJETO MÓVIL, del 6 de Mayo de 2011, de ROBERT BOSCH GMBH: Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos para detectar un objeto móvil, en especial un vehículo que se aproxima, […]
DISPOSITIVO PARA DETECTAR UN OBJETO MÓVIL, del 6 de Mayo de 2011, de ROBERT BOSCH GMBH: Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos para detectar un objeto móvil, en especial un vehículo que se aproxima, […]
 PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
 SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]
SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]