Procedimiento para someter a prueba un sistema quirúrgico.
Procedimiento automatizado para someter a prueba un sistema de irrigación/aspiración quirúrgico,
comprendiendo dicho sistema;
(a) una pieza de mano quirúrgica (22) que comprende una cámara de prueba (28),
(b) una fuente de fluido de irrigación (32) conectada a la pieza de mano,
(c) una fuente o bomba de aspiración (16) conectada a la pieza de mano,
en el que la fuente de fluido de irrigación (32) y la fuente de aspiración (16) están bajo el control de una consola quirúrgica y en el que la cámara de prueba (28) proporciona un trayecto de fluido cerrado desde la fuente de fluido de irrigación (32) a la fuente de aspiración (16);
caracterizado porque el procedimiento comprende:
determinar (405) un primer tiempo de recuperación de presión del sistema tras interrumpir la aspiración de un fluido durante un primer intervalo de tiempo desde la cámara de prueba (28), en el que el primer tiempo de recuperación de presión del sistema es una cantidad de tiempo detectada para que una presión del sistema vuelva a una presión predeterminada;
determinar (413) un segundo tiempo de recuperación de presión del sistema tras interrumpir la aspiración de fluido durante un segundo intervalo de tiempo desde la cámara de prueba (28);
determinar (407) una dependencia del tiempo de recuperación con respecto a una longitud de aspiración basándose en una comparación del primer tiempo de recuperación de presión del sistema con el segundo tiempo de recuperación de presión del sistema, en el que determinar la dependencia comprende determinar (415) si el segundo tiempo de recuperación de presión del sistema es mayor o menor que el primer tiempo de recuperación de presión del sistema; y
determinar un estado del equilibrio fluídico del sistema de irrigación/aspiración basándose en la dependencia determinada del tiempo de recuperación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/023145.
Solicitante: NOVARTIS AG.
Nacionalidad solicitante: Suiza.
Dirección: LICHTSTRASSE 35 4056 BASEL SUIZA.
Inventor/es: MORGAN, MICHAEL, D., GORDON, RAPHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01F15/07 FISICA. › G01 METROLOGIA; ENSAYOS. › G01F MEDIDA DEL VOLUMEN, FLUJO VOLUMETRICO, FLUJO MASICO O NIVEL DE LIQUIDOS; DOSIFICACION VOLUMETRICA. › G01F 15/00 Detalles o accesorios de aparatos de los grupos G01F 1/00 - G01F 13/00 en tanto que dichos detalles y accesorios no estén adaptados a tipos particulares de tales aparatos. › Integración para obtener el flujo total, p. ej. utilizando un mecanismo integrador de funcionamiento mecánico.
PDF original: ES-2432376_T3.pdf
Fragmento de la descripción:
Procedimiento para someter a prueba un sistema quirúrgico.
Antecedentes de la invención La presente invención se refiere, en general, al campo de la cirugía de cataratas y, más particularmente, a un procedimiento de control de parámetros quirúrgicos para su utilización con un sistema de facoemulsificación.
El ojo humano en sus atribuciones más simples funciona para proporcionar visión transmitiendo luz a través de una parte exterior transparente denominada córnea y enfocando la imagen a través del cristalino sobre la retina. La calidad de la imagen enfocada depende de muchos factores, incluyendo el tamaño y la forma del ojo, así como la transparencia de la córnea y el cristalino.
Cuando la edad o la enfermedad provocan que el cristalino sea menos transparente, se deteriora la visión debido a la luz disminuida que puede transmitirse a la retina. Esta deficiencia en el cristalino del ojo es conocida médicamente como catarata. Un tratamiento aceptado para esta afección es la retirada quirúrgica del cristalino y la sustitución de la función del cristalino por una lente intraocular artificial (IOL) .
En Estados Unidos, la mayoría de cristalinos cataratosos se retiran por medio de una técnica quirúrgica denominada facoemulsificación. Durante esta intervención se inserta una delgada punta de corte de facoemulsificación en el cristalino enfermo y es sometida a vibración ultrasónica. La punta de corte vibrante licúa o emulsifica el cristalino de modo que el cristalino pueda ser aspirado fuera del ojo. El cristalino enfermo, una vez retirado, es sustituido por un cristalino artificial.
Un dispositivo quirúrgico ultrasónico típico adecuado para intervenciones oftálmicas consiste en una pieza de mano activada ultrasónicamente, una punta de corte aneja, una manga de irrigación y una consola de control electrónica. El conjunto de pieza de mano se une a la consola de control por un cable eléctrico y tubos flexibles. Por medio del cable eléctrico, la consola varía el nivel de potencia transmitido por la pieza de mano a la punta de corte aneja y los tubos flexibles suministran fluido de irrigación al ojo y extraen fluido de aspiración de éste a través del conjunto de pieza de mano.
La parte operativa de la pieza de mano es una barra o cuerno resonante hueco, ubicado centralmente, unido directamente a un conjunto de cristales piezoeléctricos. Los cristales suministran la vibración ultrasónica requerida necesaria para activar tanto el cuerno como la punta de corte aneja durante la facoemulsificación y se controlan mediante la consola. El conjunto cristal/cuerno está suspendido dentro del cuerpo o carcasa hueca de la pieza de mano mediante monturas flexibles. El cuerpo de la pieza de mano termina en una parte u ojiva de diámetro reducido en el extremo distal del cuerpo. La ojiva está roscada externamente para recibir la manga de irrigación. Asimismo, el ánima del cuerno está internamente roscada en su extremo distal para alojar las roscas externas de la punta de corte. La manga de irrigación presenta también un ánima internamente roscada que se enrosca sobre las roscas externas de la ojiva. La punta de corte se ajusta de modo que la punta sobresalga solamente una cantidad predeterminada más allá del extremo abierto de la manga de irrigación. Las piezas de mano y las puntas de corte ultrasónicas se describen de manera más exhaustiva en las patentes US nos 3.589.363; 4.223.676; 4.246.902; 4.493.694; 4.515.583; 4.589.415; 4.609.368; 4.869.715; 4.922.902; 4.989.583; 5.154.694 y 5.359.996.
En funcionamiento, los extremos de la punta de corte y la manga de irrigación se insertan en una pequeña incisión de anchura predeterminada de la córnea, la esclerótica u otra ubicación. La punta de corte se hace vibrar ultrasónicamente a lo largo de su eje longitudinal dentro de la manga de irrigación por el cuerno ultrasónico activado por cristales, emulsificando así el tejido seleccionado in situ. El ánima hueca de la punta de corte se comunica con el ánima del cuerno que, a su vez, se comunica con el conducto de aspiración que se extiende de la pieza de mano a la consola. Una fuente de presión reducida o vacío en la consola extrae o aspira el tejido emulsificado desde el ojo a través del extremo abierto de la punta de corte, las ánimas de la punta de corte y del cuerno y el conducto de aspiración y lo desplaza a un dispositivo de recogida. La aspiración del tejido emulsificado se favorece mediante una solución de lavado salina o un irrigante que se inyecta en el sitio quirúrgico a través del pequeño intersticio anular entre la superficie interior de la manga de irrigación y la punta de corte.
Antes de su utilización en la cirugía, las diversas piezas de mano, tubos y receptáculos de administración de fluidos deben en su totalidad purgarse de aire o cebarse. Durante la fase de cebado, los actuales sistemas de facoemulsificación también llevan a cabo una etapa de diagnóstico del sistema de aspiración para hacer una prueba de fugas o bloqueos en el sistema de aspiración. Durante esta etapa de diagnóstico, la bomba del sistema se activa para generar un determinado vacío en el conducto de aspiración. Si el sistema no puede llegar al nivel de vacío deseado, esto indica al sistema que existe una fuga en algún lugar del sistema de aspiración, y el sistema hará sonar una alarma para advertir al operario. Por otro lado, la incapacidad de liberar un vacío previamente creado indica que existe un bloqueo en el sistema, tal como una parte retorcida en uno de los tubos.
Tras la etapa de cebado, se realiza una comprobación de flujo prevista específicamente para verificar un flujo de fluido adecuado a través de la pieza de mano quirúrgica. Los actuales sistemas de facoemulsificación usan una pequeña cámara de prueba de caucho que se encaja sobre la punta de corte y la manga. La cámara de prueba se llena con el fluido de irrigación y, cuando se coloca sobre la pieza de mano, crea un sistema de aspiración flexible cerrado. Durante esta prueba, un excesivo nivel de vacío a una velocidad de bomba dada indicaría una restricción de flujo en el trayecto hidráulico. También puede realizarse una comprobación manual por parte del usuario para asegurarse de que la cámara de prueba está llena y presurizada al completarse la prueba. Una cámara de prueba desinflada sería una indicación de la restricción del flujo de irrigación. Aunque este procedimiento de sistema de cebado y diagnóstico es eficaz, puede comprometer en cierto modo la tecnología de los actuales sistemas de facoemulsificación. Por ejemplo, la tecnología de las puntas de facoemulsificación ha evolucionado a lo largo de los años y actualmente se dispone de muchas clases de punta y diámetros diferentes. Como apreciará un experto en la materia, una punta de aspiración con un diámetro o ánima pequeña presentará, naturalmente, una mayor resistencia al flujo que una apunta con un ánima más grande. Por tanto, a cualquier velocidad de bomba dada, una punta con un ánima pequeña creará un mayor vacío en el conducto de aspiración que una punta con un ánima grande. Como resultado, los ajustes de diagnóstico que usan un nivel de vacío compatible con una punta con un ánima pequeña pueden no ser apropiados cuando se usa una punta con un ánima grande, y viceversa. Esto puede ocasionar imprecisiones y falsas alarmas por parte del sistema. Pueden derivarse imprecisiones similares de tubos y piezas de mano de diferentes tamaños. Además, confiar en el usuario para verificar un estado correcto de la cámara de prueba una vez completado el diagnóstico es subjetivo y susceptible al fallo humano.
Por tanto, continúa existiendo la necesidad de un procedimiento para cebar y someter a prueba los sistemas de facoemulsificación que sea preciso para una amplia variedad de piezas de mano, tubos y puntas.
El documento US 2004/167462 A1 se refiere a la reducción o eliminación del flujo de entrada de aire a un campo quirúrgico que se produce durante el tiempo en el que se usa un instrumento quirúrgico para introducir fluido al campo quirúrgico.
Breve sumario de la invención La presente enseñanza proporciona un procedimiento según se detalla en la reivindicación 1. Se proporcionan características ventajosas en las reivindicaciones dependientes de la misma.
La presente invención mejora la técnica anterior proporcionando un procedimiento para someter a prueba un sistema quirúrgico que aprovecha que en un sistema de irrigación/aspiración equilibrado (flujo de entrada ≥ flujo de salida) la duración de la recuperación de la presión de aspiración a la presión de la fuente de fluido de irrigación inmediatamente después de detener la bomba es independiente del tiempo de funcionamiento... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento automatizado para someter a prueba un sistema de irrigación/aspiración quirúrgico, comprendiendo dicho sistema;
(a) una pieza de mano quirúrgica (22) que comprende una cámara de prueba (28) ,
(b) una fuente de fluido de irrigación (32) conectada a la pieza de mano,
(c) una fuente o bomba de aspiración (16) conectada a la pieza de mano,
en el que la fuente de fluido de irrigación (32) y la fuente de aspiración (16) están bajo el control de una consola quirúrgica y en el que la cámara de prueba (28) proporciona un trayecto de fluido cerrado desde la fuente de fluido de irrigación (32) a la fuente de aspiración (16) ;
caracterizado porque el procedimiento comprende:
determinar (405) un primer tiempo de recuperación de presión del sistema tras interrumpir la aspiración de un fluido durante un primer intervalo de tiempo desde la cámara de prueba (28) , en el que el primer tiempo de recuperación de presión del sistema es una cantidad de tiempo detectada para que una presión del sistema vuelva a una presión predeterminada;
determinar (413) un segundo tiempo de recuperación de presión del sistema tras interrumpir la aspiración de fluido durante un segundo intervalo de tiempo desde la cámara de prueba (28) ;
determinar (407) una dependencia del tiempo de recuperación con respecto a una longitud de aspiración basándose en una comparación del primer tiempo de recuperación de presión del sistema con el segundo tiempo de recuperación de presión del sistema, en el que determinar la dependencia comprende determinar
(415) si el segundo tiempo de recuperación de presión del sistema es mayor o menor que el primer tiempo de recuperación de presión del sistema; y
determinar un estado del equilibrio fluídico del sistema de irrigación/aspiración basándose en la dependencia determinada del tiempo de recuperación.
2. Procedimiento según la reivindicación 1, en el que determinar un primer tiempo de recuperación de presión del sistema tras interrumpir la aspiración de un fluido durante un primer intervalo de tiempo desde la cámara de prueba (28) comprende:
(a) exponer la cámara de prueba (28) a un vacío generado por la fuente de aspiración (16) durante un primer periodo de tiempo (T1) ;
(b) aislar la cámara de prueba (28) de la fuente de aspiración tras el primer periodo de tiempo;
(c) medir (405) una primera cantidad de tiempo (t01) que emplea la fuente de fluido de irrigación para devolver la presión en la cámara de prueba a una cifra no negativa tras el primer periodo de tiempo,
en el que determinar un segundo tiempo de recuperación de presión del sistema tras interrumpir la aspiración de fluido durante un segundo intervalo de tiempo desde la cámara de prueba (28) comprende:
(d) exponer la cámara de prueba (28) a un vacío generado por la fuente de aspiración (16) durante un segundo periodo de tiempo (T2) ;
(e) aislar la cámara de prueba (28) de la fuente de aspiración tras el segundo periodo de tiempo;
(f) medir (413) una segunda cantidad de tiempo (t02) que emplea la fuente de fluido de irrigación para devolver la presión en la cámara de prueba (28) a una cifra no negativa tras el segundo periodo de tiempo,
en el que determinar una dependencia del tiempo de recuperación con respecto a una longitud de aspiración basándose en una comparación del primer tiempo de recuperación de presión del sistema con el segundo tiempo de recuperación de presión del sistema comprende:
(g) comparar (415) la primera cantidad de tiempo (t01) con la segunda cantidad de tiempo (t02) ; y
(h) determinar el estado del sistema quirúrgico basándose en la comparación de la primera cantidad de tiempo (t01) con la segunda cantidad de tiempo (t02) .
3. Procedimiento según la reivindicación 1, que comprende además:
(a) abrir una válvula de irrigación (42) para permitir que el fluido de irrigación fluya desde la fuente de fluido de irrigación (32) a la pieza de mano (22) ;
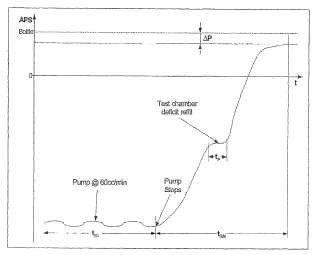
(b) medir (401) una presión (PPRUEBA) en un sensor de presión de aspiración (26) con la bomba de aspiración (16) detenida;
en el que determinar un primer tiempo de recuperación de presión del sistema tras interrumpir la aspiración de un fluido durante un primer intervalo de tiempo desde la cámara de prueba (28) comprende hacer funcionar (403) la bomba durante el primer intervalo de tiempo (T1) lo suficiente para generar un vacío en el sensor de presión de aspiración, después detener la bomba;
(c) medir (405) una cantidad de tiempo (t01) que emplea la presión (PPRUEBA) en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido;
en el que el procedimiento comprende además:
(d) comparar (407) una cantidad de tiempo que emplea la presión en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido respecto a un valor de tiempo predeterminado; y
(e) aprobar o rechazar el sistema basándose en la comparación (407, 409) del tiempo que emplea la presión en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido respecto al valor de tiempo predeterminado.
4. Procedimiento según la reivindicación 3, en el que (a) determinar un segundo tiempo de recuperación de presión del sistema tras interrumpir la aspiración de fluido durante un segundo intervalo de tiempo desde la cámara de prueba (28) comprende hacer funcionar la bomba (411) durante el segundo intervalo de tiempo (T2) lo suficiente para generar un vacío en el sensor de presión de aspiración, en el que el segundo intervalo de tiempo (T2) es mayor que el primer intervalo de tiempo (T1) , después detener la bomba;
(b) medir (413) una segunda cantidad de tiempo (t02) que emplea la presión en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido;
en el que determinar una dependencia del tiempo de recuperación con respecto a una longitud de aspiración basándose en una comparación del primer tiempo de recuperación de presión del sistema con el segundo tiempo de recuperación de presión del sistema comprende:
(c) comparar (415) la primera cantidad de tiempo (t01) que emplea la presión en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido con la segunda cantidad de tiempo (t02) que emplea la presión en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido; y
en el que el procedimiento comprende además:
(d) aprobar o rechazar el sistema basándose en la comparación (415, 417) de la primera cantidad de tiempo que emplea la presión en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido con la segunda cantidad de tiempo que emplea la presión en el sensor de presión de aspiración para alcanzar PSRC después de que la bomba se haya detenido.
Patentes similares o relacionadas:
Contador rellenable de líquido para caudalímetro, del 2 de Abril de 2012, de ELSTER METERING LIMITED: Contador para un caudalímetro, comprendiendo el contador un alojamiento que puede ser rellenado de líquido y sellado que contiene al menos una rueda de contador […]