Sistema robotizado para colocar un paciente con respecto a una fuente de partículas.
Sistema (1) robotizado para colocar un paciente con respecto a al menos una fuente de un haz departículas,
que comprende al menos una fuente fija de un haz de partículas para radioterapia, dos brazos(3, 4) robotizados y guías (31, 32) lineales respectivas, una camilla (5) de tratamiento para el paciente,estando conectado cada extremo de la misma al extremo de dichos brazos (3, 4) robotizados, y una unidadlógica configurada para controlar y coordinar movimientos de los dos brazos (3, 4) robotizados, en el que
- cada brazo (3, 4) robotizado puede moverse a lo largo de la guía (31, 32) lineal respectiva configuradapara fijarse el suelo (11), al techo (10) o a una pared de la habitación en la que está instalado el sistema (1)robotizado, teniendo dichos brazos (3, 4) robotizados seis ejes de rotación y un eje de traslación horizontal,
- dicha al menos una fuente está fijada y emite un haz de partículas comprendido siempre dentro delespacio entre los extremos de los dos brazos (3, 4) robotizados,
- siendo adecuada la camilla (5) de tratamiento para colocarse en cualquier posición del espaciocomprendido entre los dos brazos (3, 4) robotizados, y estando configurada para rotar axialmente 360ºalrededor de la línea que une los extremos de los brazos (3, 4) robotizados.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10169458.
Solicitante: ITEL TELECOMUNICAZIONI S.R.L.
Nacionalidad solicitante: Italia.
Dirección: Via Labriola, Lotto 39 70037 Ruvo di Puglia (BA) ITALIA.
Inventor/es: DIAFERIA, LEONARDO, DIMICCOLI,VINCENZO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
PDF original: ES-2427045_T3.pdf
Fragmento de la descripción:
Sistema robotizado para colocar un paciente con respecto a una fuente de partículas La presente invención se refiere a un sistema robotizado para colocar un paciente con respecto a al menos una fuente de un haz de partículas (tal como, por ejemplo, protones, iones de luz, fotones, electrones, etc.) que se ha demostrado que son eficaces para el tratamiento de enfermedades tales como cáncer, por ejemplo.
Se conocen aparatos para tratar tales enfermedades mediante haces de partículas que incluyen (además de la al menos una fuente (no descrita en el presente documento puesto que se conoce en sí misma) que emite un haz de partículas tan colimado como sea posible) medios para ajustar la posición relativa de la al menos una fuente de un haz de partículas y una camilla de tratamiento que porta al paciente, de modo que el al menos un haz de partículas golpea la diana exactamente (es decir los tejidos del paciente que van a irradiarse) sin afectar (o afectando lo menos posible) a los tejidos sanos circundantes.
Los métodos y aparatos usados para identificar, dentro del cuerpo del paciente, la posición y tamaño de la diana y los procedimientos para determinar la intensidad y duración del haz de partículas que va a suministrarse en cada sesión no se comentarán en el presente documento puesto que tales métodos y aparatos se conocen se conocen en sí mismos.
Una vez que se adquiere la ubicación de la diana, es necesario colocar el paciente con respecto a la al menos una fuente de modo que el al menos un haz pueda golpear la diana tal como se prevé mediante el plan de tratamiento, sin afectar a tejidos (tales como, por ejemplo, las gónadas) que se dañan (o pueden dañarse) gravemente por las partículas más pequeñas posibles y afectando lo menos posible al tejido sano que rodea la diana.
Para ajustarse lo máximo posible al plan de tratamiento, el cuerpo del paciente puede moverse con respecto a la al menos una fuente de modo que la diana se golpea mediante el al menos un haz de partículas durante toda la duración de la sesión.
En muchos dispositivos actualmente en uso la al menos una fuente de un haz de partículas se porta desde una estructura (denominada “pórtico”) (que consiste habitualmente en una estructura de metal semiesférica que tiene un diámetro que varía desde tres hasta doce metros y que es lo suficientemente resistente para portar la al menos una fuente de un haz de partículas) que permite que la al menos una fuente se mueva con respecto al cuerpo del paciente según se desee por el médico que realiza el tratamiento.
Estos dispositivos son caros, voluminosos y tienen “zonas muertas” (es decir partes del espacio alrededor del cuerpo del paciente inalcanzables por la al menos una fuente de haz de partículas) que no siempre permiten colocar de manera óptima la al menos una fuente de un haz de partículas con respecto al cuerpo del paciente.
Para superar estos graves inconvenientes, se han propuesto dispositivos en los que el paciente, sujeto a una camilla de tratamiento portada mediante a brazo robotizado, se mueve con respecto a la al menos una fuente de un haz de partículas.
El documento WO 2009/036169 describe un brazo robotizado que tiene cinco ejes de rotación y un eje de translación vertical que porta la camilla de tratamiento: si el elevador que forma el eje de translación vertical se fija al suelo sin soportarse por una columna, el brazo robotizado no tiene “zonas muertas”. Sin embargo un brazo robotizado de este tipo no permite situar la camilla de tratamiento cerca del suelo y en cualquier caso a una altura menor que la longitud de dicho elevador cuando se retrae totalmente, ni realizar una rotación axial de 360º de la camilla de tratamiento o una colocación vertical del paciente o irradiar la espalda del paciente. Además, un volumen cilíndrico obtenido rotando axialmente la camilla de tratamiento 360º no está libre de elementos mecánicos u otros obstáculos.
El documento WO 2006/124434 describe un dispositivo que comprende al menos a un primer brazo robotizado que porta la camilla de tratamiento, un segundo brazo robotizado que porta una fuente de un haz de partículas y una unidad lógica que controla y coordina los movimientos de los dos brazos robotizados para colocar, si es posible, el paciente con respecto a la fuente del haz de partículas. De hecho, la camilla de tratamiento, la fuente del haz de partículas y/o los brazos robotizados que las portan pueden interferir entre sí, creando “zonas muertas” que dificultan la colocación óptima del paciente con respecto a la fuente del haz de partículas (o viceversa) . Un dispositivo de este tipo también tiene los mismos inconvenientes que el brazo robotizado descrito por el documento WO 2009/036169.
El documento DE 20 2004 017 881 U1 describe un sistema robotizado para sacar un coche de la cadena de producción y moverlo a otra plataforma de trabajo ejecutando una traslación vertical y horizontal del coche.
Un sistema robotizado adicional para radioterapia se da a conocer en el documento US 2003/0021386 A1.
El documento US 2004/0133983 A1 describe una mesa de cirugía, en particular a mesa de cirugía que puede
disponerse para diversos tipos de cirugía ortopédica.
El objeto de la presente invención es conseguir un sistema robotizado para colocar un paciente con respecto a al menos una fuente fija de un haz de partículas que está libre de las limitaciones e inconvenientes presentados por sistemas de colocación conocidos.
En particular, un objeto de la invención es proporcionar un sistema robotizado que permite la colocación del paciente en cualquier posición del espacio sin restricciones en el volumen entre los brazos del sistema.
Otro objeto de la invención es proporcionar un sistema robotizado de este tipo que permite, en cualquier posición del espacio tal como se define anteriormente, una rotación completa de 360º del paciente alrededor de su eje longitudinal.
Los objetos mencionados anteriormente se consiguen mediante un sistema robotizado especificado en la reivindicación independiente 1.
Características ventajosas adicionales de la invención forman parte de las reivindicaciones dependientes.
Un sistema robotizado según la invención comprende al menos una fuente fija de un haz de partículas, dos brazos robotizados, una camilla de tratamiento para el paciente y una unidad lógica que controla y coordina los movimientos de los dos brazos robotizados.
Cada extremo de la camilla de tratamiento está conectado a un extremo de los brazos robotizados y el al menos un haz de partículas emitido por la al menos una fuente fija está siempre incluido en el espacio entre los extremos de los dos brazos robotizados.
Ahora se describirá la invención con referencia a una realización meramente a modo de ejemplo (y por tanto no limitativa) ilustrada en las figuras adjuntas, en las que:
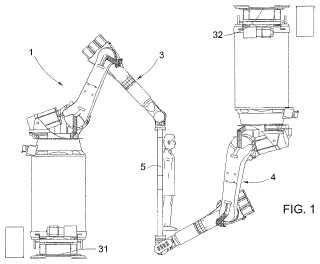
- la figura 1 muestra esquemáticamente una vista lateral de una primera realización de un sistema robotizado según la invención, con la camilla de tratamiento para el paciente en una primera posición;
- la figura 2 muestra esquemáticamente una vista desde arriba del sistema robotizado de la figura 1;
- las figuras 3 y 4 muestran respectivamente una vista lateral y una vista desde arriba del sistema robotizado de la figura 1, con la camilla de tratamiento para el paciente en una segunda posición;
- las figuras 5, 6 y 7 muestran esquemáticamente vistas laterales del sistema robotizado de la figura 1 con la camilla de tratamiento para el paciente en posiciones posibles adicionales;
- las figuras 8 y 9 muestran esquemáticamente dos vistas laterales de una segunda realización de un sistema robotizado según la invención.
La figura 1 muestra esquemáticamente una vista lateral de una primera realización de un sistema 1 robotizado según la invención, que comprende al menos una fuente fija de un haz de partículas, los brazos (3, 4) robotizados, la camilla 5 de tratamiento y una unidad lógica que controla y coordina los movimientos de los dos brazos (3, 4) robotizados, teniendo preferiblemente seis ejes de rotación y un eje de traslación horizontal.
Cada extremo de la camilla 5 de tratamiento está conectado al extremo de uno de los brazos (3, 4) robotizados, que están situados en lados opuestos con respecto a la al menos una fuente fija de modo que el al menos un haz de partículas emitido por la al menos una fuente fija está siempre incluido en el espacio entre los extremos de los dos brazos (3, 4) robotizados.
La al menos una fuente fija de un haz de partículas y la unidad lógica se omiten en las figuras... [Seguir leyendo]
Reivindicaciones:
1. Sistema (1) robotizado para colocar un paciente con respecto a al menos una fuente de un haz de partículas, que comprende al menos una fuente fija de un haz de partículas para radioterapia, dos brazos (3, 4) robotizados y guías (31, 32) lineales respectivas, una camilla (5) de tratamiento para el paciente, estando conectado cada extremo de la misma al extremo de dichos brazos (3, 4) robotizados, y una unidad lógica configurada para controlar y coordinar movimientos de los dos brazos (3, 4) robotizados, en el que
- cada brazo (3, 4) robotizado puede moverse a lo largo de la guía (31, 32) lineal respectiva configurada
para fijarse el suelo (11) , al techo (10) o a una pared de la habitación en la que está instalado el sistema (1) robotizado, teniendo dichos brazos (3, 4) robotizados seis ejes de rotación y un eje de traslación horizontal,
- dicha al menos una fuente está fijada y emite un haz de partículas comprendido siempre dentro del
espacio entre los extremos de los dos brazos (3, 4) robotizados, 15
- siendo adecuada la camilla (5) de tratamiento para colocarse en cualquier posición del espacio comprendido entre los dos brazos (3, 4) robotizados, y estando configurada para rotar axialmente 360º alrededor de la línea que une los extremos de los brazos (3, 4) robotizados.
2. Sistema (1) robotizado según la reivindicación 1, en el que las dos guías (31, 32) lineales son paralelas u oblicuas entre sí.
3. Sistema (1) robotizado según la reivindicación 1 ó 2, en el que una de las guías (31, 32) lineales está
configurada para fijarse el suelo (11) de la habitación en la que está instalado el sistema (1) robotizado, 25 mientras que la otra guía (32, 31) lineal está configurada para fijarse al techo (10) de dicha habitación.
4. Sistema (1) robotizado según la reivindicación 1 ó 2, en el que ambas guías (31, 32) lineales están configuradas para fijarse al techo (10) o al suelo (11) de la habitación en la que está instalado el sistema (1) robotizado.
5. Sistema (1) robotizado según la reivindicación 1, en el que el haz de partículas es paralelo u ortogonal a las guías (31, 32) lineales, o es oblicuo con respecto a dichas guías.
6. Sistema (1) robotizado según la reivindicación 1, en el que uno de los brazos (3, 4) robotizados consiste en
un carro (21) que puede moverse a lo largo de una guía (31, 32) lineal paralela a la guía (32, 31) lineal a lo largo de la cual desliza el otro brazo (4, 3) robotizado, y dicho carro (21) porta un elevador (22) , que a su vez porta una junta (23) esférica a la que se conecta un extremo de la camilla (5) de tratamiento.
7. Sistema (1) robotizado según la reivindicación 6, en el que la guía lineal a lo largo de la que desliza el carro (21) está situada dentro de un hueco formado en el suelo (11) , en el techo (10) o en una pared de la habitación en la que está instalado el sistema (1) robotizado.
8. Sistema (1) robotizado según la reivindicación 6, en el que dicha camilla (5) de tratamiento está configurada para trasladarse por el elevador (22) y para oscilar alrededor de la junta (23) esférica con respecto al eje 45 (41) que pasa a través del extremo del otro brazo robotizado, para ocupar cualquier posición dentro de un cono que tiene el vértice en la junta (23) esférica.
9. Sistema (1) robotizado según la reivindicación 8, en el que la junta (23) esférica permite un ángulo de vértice de 180º, y en el que la camilla (5) de tratamiento es adecuada para ocupar cualquier posición dentro 50 de un hemisferio que tiene el vértice en la junta (23) esférica.
10. Sistema (1) robotizado según una cualquiera de las reivindicaciones anteriores, en el que la camilla (5) de tratamiento proporciona un asiento solidario con dicha camilla (5) de tratamiento.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Manipulación y aireación automáticas de una pila de hojas de papel, del 8 de Julio de 2020, de GRAPHIC ROBOTICS APS: Método de manipulación y de aireación de una pila de trabajo de hojas de papel rectangulares en conexión con el uso de las hojas de papel en un centro de 5 impresión, […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Accionamiento de un dispositivo que comprende brazos mecánicos, del 17 de Junio de 2020, de Memic Innovative Surgery Ltd: Un mecanismo para accionar el movimiento de un eje que tiene dos grados de libertad, que comprende: un primer engranaje configurado […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]