Sistema de oruga con geometría variable.
Sistema (10) de oruga con geometría variable, que comprende:
- una correa (11) de rueda,
que comprende una sección (11p) que tiene una respectiva primera área (a1);
teniendo dicha sección 5 (11p) que, en uso, está en contacto con el terreno o calzada, una longitud (L);
- al menos una rueda (12) de tracción, acoplada a dicha correa (11) de rueda y susceptible de suministrar una potencia motriz de rotación de dicha correa (11) de rueda; y
- al menos un engranaje (13) accionado, acoplado a dicha correa (11) de rueda;
dicho sistema (10) de oruga comprende medios (14) actuadores para una variación de geometría de parte de dicha correa (11) de rueda; comprendiendo dichos medios (14) actuadores una configuración de intervención en la que configuran dicha sección (11p) de dicha correa (11) de rueda en al menos una segunda área (a2) en uso en contacto con el terreno; siendo dicha segunda área (a2) diferente de dicha primera área (a1);
dichos medios actuadores comprenden una pluralidad de ruedas (15) de empuje de dicha sección (11p) de dicha correa (11) de rueda; pudiendo configurarse dicha pluralidad de ruedas (15) de empuje en una pluralidad de diferentes posiciones;
en dicha configuración de intervención dicha longitud (L) es reducida con respecto a una configuración de reposo de dichos medios (14) actuadores;
caracterizado porque en dicha configuración de reposo dichas ruedas (15) de empuje no se encuentran con dicha sección (11p).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11191334.
Solicitante: OTO MELARA S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA VALDILOCCHI, 15 19136 LA SPEZIA ITALIA.
Inventor/es: LA SPINA,GIOVANNI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D55/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › Disposición, emplazamiento o adaptación de rodillos.
PDF original: ES-2458222_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un sistema de oruga y, más detalladamente, a un sistema de oruga con geometría variable.
Se sabe que los vehículos oruga, en particular los de tipo militar o agrícola, están dotados de un par de orugas independientes, que están montadas respectivamente en un lado izquierdo y en un lado derecho del propio vehículo.
También se sabe que dichas orugas se controlan mediante medios de movimiento a motor, que pueden hacer que el vehículo realice un movimiento de rotación sobre un punto central, que también se conoce como movimiento de pivote.
El movimiento de rotación del vehículo sobre un punto central, también conocido como movimiento de pivote o pivotante, es particularmente fatigante para la parte de oruga que está en contacto con el suelo o con la superficie de la carretera, desde un punto de vista tanto mecánico como energético.
Desde un punto de vista mecánico, dicho movimiento es fatigante debido al hecho de que desarrolla una fricción por deslizamiento que está:
-orientada en una dirección que es sustancialmente ortogonal a la fuerza de peso; y
-distribuida de un modo no uniforme sobre la parte de oruga que está contacto con el suelo o con la superficie de la carretera.
Desde un punto de vista energético, la fatiga está provocada por la fricción mencionada anteriormente, que genera un desperdicio significativo de potencia y par motor con el fin de hacer frente a la demanda de rotación sobre un punto central, en particular en caso de que el vehículo sea pesado o largo con respecto a su rodada del eje (significando rodada del eje la distancia entre los respectivos centros de las dos ruedas del mismo eje) y, por tanto, en particular para grandes máquinas agrícolas o vehículos militares dotados de cargas pesadas o corazas pesadas.
Se conoce, por la solicitud de patente US4500139A, un sistema de soporte que puede permitir la alteración selectiva de la longitud de la sección que toca el suelo de una banda de rodamiento; permitiendo así el contacto con el suelo máximo que es necesario para la tracción y el soporte. Dicho sistema de soporte también permite un contacto de la oruga con el suelo reducido para una movilidad mejorada.
También se conoce, por la solicitud de patente JPH0288875U, un sistema de soporte que puede permitir la alteración selectiva de la longitud de la sección que toca el suelo de una banda de rodamiento.
Los inconvenientes descritos anteriormente pueden aplicarse tanto a vehículos oruga dotados de orugas de caucho como a vehículos oruga dotados de orugas de metal.
Por tanto, el objeto de la presente invención es describir un sistema de oruga con geometría variable, que permita una reducción de los inconvenientes descritos anteriormente.
Según la presente invención, se proporciona un sistema de oruga con geometría variable, que es del tipo reivindicado en la primera reivindicación.
Según la presente invención, se proporciona, además, un vehículo oruga, que comprende un sistema de oruga con geometría variable y es del tipo reivindicado en la reivindicación 9.
Ahora se describirá la invención con referencia a los dibujos adjuntos, que ilustran una realización no limitativa, en los que:
-la figura 1 ilustra un sistema de oruga con geometría variable en una primera configuración de uso según la presente invención; y
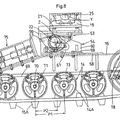
-la figura 2 ilustra un sistema de oruga con geometría variable en una segunda configuración de uso según la presente invención.
Con referencia a la figura 1, el número 10 indica un sistema de oruga con geometría variable como un todo, que comprende una oruga 11, que presenta una primera sección 11p que tiene una respectiva primera área que está en contacto con el suelo y una segunda sección 11s que tiene una respectiva segunda área que está enfrente de la primera sección 11p anterior, y que está tensada mediante al menos una rueda 12 de accionamiento y al menos una rueda 13 accionada, que están acopladas ambas a la oruga 11.
En particular, la rueda 12 de accionamiento está dispuesta en correspondencia con un extremo de la oruga que está orientado hacia el extremo delantero o trasero de un vehículo dotado de un par de orugas 11, mientras que la rueda 13 accionada está dispuesta en correspondencia con un segundo extremo de la oruga que está orientado hacia el extremo opuesto del propio vehículo.
La rueda 12 de accionamiento está acoplada a la oruga 11 para dotarla de una fuerza de accionamiento que sea suficiente para mover el vehículo y, por tanto, hacer que la oruga rote con respecto al suelo.
La rueda 12 de accionamiento, además, tiene que estar acoplada a la oruga para poder proporcionar una fuerza de accionamiento que sea suficiente para hacer que el vehículo rote sobre un punto central o rote sobre sí mismo, siendo conocido dicho movimiento como movimiento de pivote o pivotante.
El sistema 10 de oruga comprende una pluralidad de medios 14 actuadores, que permiten una variación de la geometría de la sección 11p en contacto con el suelo, de manera que puede reducirse el área en contacto con el suelo o con la superficie de la carretera, pasando de un primer tamaño más grande a un segundo tamaño más pequeño, cuando se lleva a cabo el movimiento de pivote.
Los medios 14 actuadores están instalados en un lado de la oruga, de manera que, cuando se monta el sistema 10 en el vehículo, dichos medios 14 actuadores se disponen dentro de la rodada del eje del propio vehículo.
Los medios 14 actuadores comprenden preferiblemente, por ejemplo, un par de pistones de empuje que tienen un primer extremo que está conectado rígidamente a una estructura rígida del sistema, y un segundo extremo móvil que actúa sobre la primera sección 11p de oruga 11.
Más detalladamente, el segundo extremo móvil actúa sobre una o más ruedas 15 de empuje, ejerciendo así, sobre las mismas, una fuerza de empuje que tiene una dirección que es sustancialmente ortogonal al plano sobre el que se extiende la primera sección 11p de la oruga. En las figuras adjuntas, hay dos ruedas 15 de empuje para cada oruga 11, estando dispuestas dichas ruedas 15 de empuje en una fila a lo largo de una dirección de extensión máxima de la propia oruga 11 y rotando, además, alrededor de ejes paralelos; debido al efecto de la fuerza ejercida por los pistones de empuje, las ruedas 15 de empuje deforman la primera sección 11p sustancialmente en correspondencia con su parte central, concretamente en una región que comprende la proyección vertical del centro de gravedad del vehículo sobre el suelo, reduciendo así el área de la primera sección mencionada anteriormente que está en contacto con el suelo o con la superficie de la carretera.
Detalladamente, en una primera configuración de uso, o configuración de reposo, los medios 14 actuadores están en una posición de reposo y las ruedas 15 de empuje no interceptan la primera sección 11p de la oruga, que, por tanto, se extiende sobre el suelo con un área que tiene un primer valor a1.
En una segunda configuración de uso, o configuración de intervención, que puede seleccionarse libremente por un usuario del vehículo en el que esté instalado el sistema 10 según la presente invención o se activa automáticamente en concurrencia con la ejecución del movimiento de pivote, los medios 14 actuadores se cambian de dicha posición de reposo a una posición operativa, en la que las ruedas 15 de empuje actúan sobre parte de la primera sección 11p de la oruga 11, modificando así su forma (si se observa la oruga lateralmente) y llevando el área de la sección 11p que está en contacto con el suelo o con la superficie de la carretera a un segundo valor a2, que es menor que el valor a1 anterior.
Cuando el sistema 10 está en la segunda configuración de uso, la rueda 12 de accionamiento y la rueda 13 accionada se elevan con respecto al suelo o la superficie de la carretera.
Como consecuencia, el peso total del vehículo se libera sobre un área que tiene un valor a2 que es menor que el valor a1.
Si se supone la instalación de un par de sistemas 10 según la presente invención en un vehículo y su disposición respectivamente en el lado izquierdo y en el lado derecho del propio vehículo, y si se define T [Nm] como el par motor necesario para hacer que dicho vehículo realice un movimiento de pivote, durante el cual, como se mencionó anteriormente, se hace que el vehículo rote sobre un punto central, se obtiene:
en el que L [m] corresponde a la longitud de la sección 11p de la oruga que está en contacto con el suelo o con la superficie de la carretera, mientras que C [m] indica la distancia entre... [Seguir leyendo]
Reivindicaciones:
1. Sistema (10) de oruga con geometría variable, que comprende:
-una correa (11) de rueda, que comprende una sección (11p) que tiene una respectiva primera área (a1) ; teniendo dicha sección 5 (11p) que, en uso, está en contacto con el terreno o calzada, una longitud (L) ;
-al menos una rueda (12) de tracción, acoplada a dicha correa (11) de rueda y susceptible de suministrar una potencia motriz de rotación de dicha correa (11) de rueda; .
10. al menos un engranaje (13) accionado, acoplado a dicha correa (11) de rueda;
dicho sistema (10) de oruga comprende medios (14) actuadores para una variación de geometría de parte de dicha correa (11) de rueda; comprendiendo dichos medios (14) actuadores una configuración de intervención en la que configuran dicha sección (11p) de dicha correa (11) de rueda en al menos una segunda área (a2) en uso en contacto con el terreno; siendo dicha segunda área (a2) diferente de dicha primera área (a1) ;
dichos medios actuadores comprenden una pluralidad de ruedas (15) de empuje de dicha sección (11p) de 20 dicha correa (11) de rueda; pudiendo configurarse dicha pluralidad de ruedas (15) de empuje en una pluralidad de diferentes posiciones;
en dicha configuración de intervención dicha longitud (L) es reducida con respecto a una configuración de reposo de dichos medios (14) actuadores;
caracterizado porque en dicha configuración de reposo dichas ruedas (15) de empuje no se encuentran con dicha sección (11p) .
2. Sistema de oruga según la reivindicación 1, en el que en dicha configuración de intervención dicha segunda 30 área es más pequeña con respecto a dicha primera área.
3. Sistema de oruga según la reivindicación 1, en el que dicha segunda área está:
-en posición centrada con respecto a una proyección sobre el suelo del centro de gravedad de un vehículo 35 en el que dicho sistema (10) es susceptible de montarse; y
-encerrada dentro de dicha primera área.
4. Sistema de oruga según la reivindicación 1, en el que dichos medios (14) actuadores comprenden una pluralidad de pistones de empuje, que tienen un primer extremo fijado a una estructura rígida de dicho sistema (10) de oruga y un segundo extremo móvil que actúa sobre dicha sección (11p) .
5. Sistema de oruga según la reivindicación 4 y la reivindicación 1, en el que dicho segundo extremo móvil está conectado a dichas ruedas (15) de empuje; estando configuradas dichas ruedas (15) de empuje para 45 ejercer una potencia de empuje sobre dicha sección; siendo dicha potencia de empuje sustancialmente ortogonal con respecto al terreno sobre el que, en uso, descansa dicha sección de dicha correa de rueda.
6. Sistema de oruga según la reivindicación 1, en el que dicha pluralidad de ruedas (15) de empuje comprende al menos un par de ruedas orientadas en paralelo y dispuestas en fila a lo largo de una 50 dirección de extensión máxima de dicha correa (11) de rueda.
7. Sistema de oruga según cualquiera de las reivindicaciones anteriores, en el que dichos medios (14) actuadores son pistones hidráulicos.
8. Sistema de oruga según cualquiera de las reivindicaciones anteriores, en el que en dicha configuración de intervención dicha rueda (12) de tracción y dicho engranaje (13) accionado están, en uso, a una respectiva altura con respecto a un terreno plano.
9. Vehículo oruga que comprende un sistema (10) de oruga según cualquiera de las reivindicaciones 1 a 8. 60
10. Vehículo oruga según la reivindicación 9, que comprende al menos una correa (11) de rueda en un lado, respectivamente, izquierdo y derecho.
Patentes similares o relacionadas:
Rueda guía para un tren de rodaje de máquina, del 6 de Noviembre de 2019, de CATERPILLAR INC.: Una rueda guía para un tren de rodaje de una máquina, que comprende: un eje ; y un cuerpo separado que se extiende radialmente […]
Conjunto de rodillos de oruga con sistema de medición de desgaste, del 9 de Octubre de 2019, de CATERPILLAR INC.: Un rodillo de un sistema de tren de rodaje de orugas para una máquina , que comprende: un cuerpo formado como un sólido de revolución alrededor […]
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Bastidor de cadena de oruga así como una máquina de trabajo con accionamiento por cadenas de oruga, del 10 de Abril de 2019, de Liebherr-Mining Equipment Colmar SAS: Bastidor de cadena de oruga para una máquina de trabajo con una cadena de oruga, que comprende al menos una vía de rodillos, particularmente dos vías de rodillos […]
Máquina y conjunto de oruga para su uso con ella, del 1 de Agosto de 2012, de CATERPILLAR INC.: Una oruga para un conjunto de oruga para una máquina , quecomprende: un primer conjunto (18a, 218a, 318a, 518a, […]
UNIDAD DE DESPLAZAMIENTO TIPO ORUGA, del 6 de Febrero de 2012, de KUBOTA CORPORATION: Una unidad de desplazamiento tipo oruga que comprende: una caja del eje trasero de un cuerpo de la máquina de desplazamiento ; un tren de rodaje de la oruga […]
APARATO Y MÉTODO PARA REDUCIR VIBRACIONES EN UNA MÁQUINA DE TRABAJO DE ORUGAS, del 2 de Noviembre de 2011, de CATERPILLAR INC.: Una disposicion de tren de ruedas, que comprende: un primer conjunto de rodillos de la oruga, que incluye: un larguero de rodillos; una rueda […]
 VEHÍCULO DE TRABAJO DE TIPO SEMIORUGA, del 11 de Marzo de 2011, de KUBOTA CORPORATION: Vehículo de trabajo de tipo semioruga que tiene un cuerpo de vehículo , una rueda de control de dirección delantera dispuesta en una posición delantera […]
VEHÍCULO DE TRABAJO DE TIPO SEMIORUGA, del 11 de Marzo de 2011, de KUBOTA CORPORATION: Vehículo de trabajo de tipo semioruga que tiene un cuerpo de vehículo , una rueda de control de dirección delantera dispuesta en una posición delantera […]