APARATO Y MÉTODO PARA REDUCIR VIBRACIONES EN UNA MÁQUINA DE TRABAJO DE ORUGAS.
Una disposicion de tren de ruedas, que comprende: un primer conjunto (18) de rodillos de la oruga,
que incluye: un larguero (22) de rodillos; una rueda dentada motriz (24); por lo menos, un conjunto (26) de rueda loca conectado de forma giratoria a dicho larguero (22) de rodillos; un rodillo de soporte (32) conectado de forma giratoria a una parte superior de dicho larguero (22) de rodillos; una cadena (40) de la oruga entrenada alrededor de dicha rueda dentada motriz (24), de dicha, por lo menos, una rueda loca (26), y de dicho rodillo de soporte (32), definiendo dicha cadena (40) de la oruga una suspension de catenaria (52); un segundo conjunto (20) de rodillos de la oruga, que comprende: un larguero (22) de rodillos; una rueda dentada motriz (24); por lo menos, un conjunto (26) de rueda loca conectado de forma giratoria a dicho larguero (22) de rodillos; un rodillo de soporte (32) conectado de forma giratoria a una parte superior de dicho larguero (22) de rodillos; una cadena (40) de la oruga entrenada alrededor de dicha rueda dentada motriz (24), dicha, por lo menos, una rueda loca (26), y dicho rodillo de soporte (32), definiendo dicha cadena (40) de la oruga una suspension de catenaria (52); caracterizada porque dicha suspension de catenaria (52) de dicho primer conjunto (40) de rodillos de la oruga es diferente respecto de dicha suspension de catenaria (52) de dicho segundo conjunto (20) de rodillos de la oruga, de manera que durante el funcionamiento, el movimiento de la catenaria de dicho conjunto (40) de cadena de la oruga de dicho primer conjunto (18) de rodillos de la oruga esta desfasado respecto del movimiento de la catenaria de dicho conjunto (40) de cadena de la oruga de dicho segundo conjunto (20) de rodillos de la oruga, cancelando de ese modo los efectos vibratorios del movimiento de las catenarias
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/000730.
B62D55/096TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › con medios para reducir el ruido.
B62D55/14B62D 55/00 […] › Disposición, emplazamiento o adaptación de rodillos.
B62D55/30B
Clasificación PCT:
B62D55/096B62D 55/00 […] › con medios para reducir el ruido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
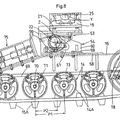
Aparato y método para reducir vibraciones en una máquina de trabajo de orugas Campo Técnico Esta invención se refiere, en general, a una disposición de tren de ruedas para una máquina de trabajo de orugas y, más en concreto, a un tren de ruedas que reduce los efectos vibratorios de una suspensión de catenaria del conjunto de cadena de la oruga en lados opuestos de una máquina de trabajo. Antecedentes Las máquinas de trabajo son soportadas e impulsadas mediante diversas disposiciones tales como ruedas, orugas y cintas. Estas disposiciones de soporte determinan en gran medida la calidad de rodadura de la máquina de trabajo, el rendimiento de la máquina de trabajo y el ruido que la máquina de trabajo emite en funcionamiento. Por ejemplo, las máquinas de trabajo, tales como las máquinas de trabajo de orugas, son soportadas e impulsadas por cadenas de oruga. El movimiento de las cadenas de oruga a medida que envuelven componentes del tren de ruedas tales como ruedas dentadas, ruedas locas, etc., crea un tipo de movimiento con un sonido metálico y molesto. Mientras se realizan operaciones de trabajo precisas, este movimiento puede provocar desperfectos en las operaciones de acabado. En concreto, cuando una topadora de tipo oruga está llevando a cabo operaciones precisas de desplazamiento, pueden producirse vibraciones que están provocadas por los componentes mecánicos debido a la naturaleza de la máquina así como al terreno que se está atravesando. Las vibraciones proceden de muchas fuentes, tales como el contacto de la cadena de oruga con las ruedas dentadas, las ruedas locas, los rodillos intermedios y el rodillo de soporte. Otra fuente es la vibración asociada con la suspensión de catenaria de un conjunto de cadena de oruga en un lado de la máquina de trabajo, que está en fase con la cadena de oruga en el lado opuesto. El documento US 6 431 665 B1 da a conocer un conjunto de ajuste de oruga para reducir la vibración de una oruga continua conducida alrededor de un larguero de la oruga que tiene una rueda de oruga, estando dichas vibraciones provocadas por el aflojamiento o el destensado de la oruga. El conjunto de ajuste de la oruga comprende un dispositivo de ajuste conectado a dicha rueda de la oruga, adaptado para ajustar la posición de la rueda de la oruga con objeto de tensar la oruga. Junto a la oruga se dispone un detector adaptado para detectar fuerzas vibratorias. Además, el conjunto de ajuste de la oruga comprende un controlador conectado al detector y al dispositivo de ajuste. El controlador determina la cantidad necesaria de ajuste o tensado de la oruga en función de la salida del detector. La presente invención está dirigida a proporcionar una forma simple de cancelar los efectos vibratorios del movimiento de la catenaria. De acuerdo con la presente invención, se dan a conocer un aparato como el definido en la reivindicación 1, y un método como el definido en la reivindicación 11. En las reivindicaciones dependientes se reivindican realizaciones preferidas de la invención. Breve Descripción de los Dibujos La figura 1 es una vista en planta de una máquina de trabajo que realiza la presente invención; la figura 2 es una vista en alzado lateral, que muestra múltiples realizaciones de la presente invención; y la figura 3 es una vista en alzado lateral, de una máquina de trabajo que muestra realizaciones adicionales de la presente invención. Descripción Detallada ES 2 367 368 T3 Haciendo referencia a los dibujos, en concreto a la figura 1, se muestra una máquina 10 de trabajo, que se ilustra como una topadora de tipo oruga. Sin embargo, debe entenderse que la máquina de trabajo podría ser una topadora de tipo oruga, una cargadora de tipo oruga, una excavadora o cualquier otra máquina de trabajo que utilice orugas sin fin como un medio de soporte e impulso de la máquina. La máquina 10 de trabajo incluye un instrumento 11 de trabajo, tal como una pala de topadora, un motor 12, una estación 14 del operario y un chasis principal 16. La unidad principal 16 soporta un primer y un segundo conjuntos 18, 20 de rodillos de oruga, estando cada uno situado en lados opuestos del chasis principal 16. El primer y el segundo conjuntos 18, 20 de rodillos son sustancial y funcionalmente similares y, por lo tanto, se describirá en detalle solamente un conjunto 18 de rodillos de la oruga, 2 ES 2 367 368 T3 haciéndose referencia a los componentes similares del segundo larguero de la oruga con los mismos números de elemento representados con una prima. El primer conjunto 18 de rodillos de la oruga incluye un larguero 22 de la oruga. El larguero 22 de la oruga incluye una rueda dentada motriz 24 montada de forma giratoria operativamente en un extremo que se muestra en la figura 3, y montada de forma giratoria operativamente al chasis principal, tal como se muestra en la figura 2. Tal como se ve en las figuras 2 y 3, en el otro extremo del larguero 22 de la oruga está montado de forma giratoria, por lo menos, un conjunto 26 de rueda loca. Una serie de rodillos intermedios de soporte 28 están conectados a una parte inferior 30 del larguero 22 de rodillos, y un rodillo de soporte 32 está conectado a una parte superior 34 del larguero 22 de rodillos. Un conjunto 40 de cadena de la oruga es entrenado en torno a la rueda dentada motriz 24, a dicho por lo menos un conjunto 26 de rueda loca, a los rodillos intermedios de soporte 28 y al rodillo de soporte 32. El conjunto 40 de cadena de la oruga, del que se muestra solamente una parte, incluye una serie de subconjuntos 42. Cada subconjunto 40 incluye un conjunto 44 de cartucho o cojinete y clavija, un par de eslabones 46 separados especialmente o interior y exterior, y una zapata 50 de la oruga conectada a los eslabones 46 de la oruga separados espacialmente. Una serie de subconjuntos 42 están acoplados mecánicamente a subconjuntos adyacentes 42, de manera que cuando son conectados entre sí un número apropiado de estos subconjuntos 42, se forma el conjunto 40 de cadena de la oruga. El conjunto 40 de cadena de la oruga tiene una longitud predeterminada para una aplicación o conjunto 20 de rodillos de la oruga dado. Tal como se muestra en las figuras 2 y 3, cada conjunto 40 de cadena de la oruga define una suspensión de catenaria 52. La suspensión de catenaria 52 es la caída o curvatura del conjunto 40 de cadena de la oruga, provocada por el peso del conjunto 40 de cadena de la oruga y/o por la tensión proporcionada por una disposición 54 de tensión de la oruga. La disposición 54 de tensión de la oruga puede ser cualquiera entre una serie de disposiciones conocidas tales como cilindros hidráulicos, cilindros de grasa, resortes o similares. La suspensión de catenaria 52 se produce en el conjunto 40 de cadena de la oruga, desde la rueda dentada motriz 24 hasta el rodillo de soporte 32, y desde el rodillo de soporte 32 hasta dicho, por lo menos, un conjunto 26 de rueda loca. Mostrada en ambas figuras 2 y 3, la suspensión de catenaria 52 es la diferencia entre el conjunto 40 de cadena de la oruga perfectamente recto teóricamente, y la curvatura real indicada por el conjunto 40 de cadena de la oruga, mostrada en una línea de trazos. En las figuras 2 y 3 se ilustran varias realizaciones de un aparato 56 de reducción de las vibraciones. En concreto, el aparato 56 de reducción de las vibraciones se crea, en general, variando la suspensión de catenaria 52 del primer conjunto 18 de rodillos de la oruga, respecto de la suspensión de catenaria 52' del segundo conjunto 20 de rodillos de la oruga, lo cual puede conseguirse mediante una serie de diferentes medios y métodos. Una realización mostrada en la figura 2, consiste en desplazar el rodillo de soporte 32' del segundo conjunto 20 de rodillos hasta una posición por encima o por debajo de la posición del rodillo de soporte 32 del primer conjunto 18 de rodillos, mostrándose en la figura 2 la posición elevada del rodillo de soporte 32'. Elevando el rodillo de soporte 32', la suspensión de catenaria 52' para el segundo conjunto 20 de rodillos sería menor que la suspensión de catenaria 52 para el primer conjunto 18 de rodillos. Bajar el rodillo de soporte 32 provocaría una cantidad mayor de suspensión de catenaria 52' para el segundo conjunto 20 de rodillos. Otra realización sería desplazar dicho, por lo menos, un conjunto 32' de rueda loca del segundo conjunto 20 de rodillos, ya sea hacia adelante o hacia atrás respecto de dicho, por lo menos, un conjunto 32 de rueda loca del primer conjunto 18 de rodillos, en una distancia exagerada indicada como "L" en la figura 2. Para conseguir el movimiento de dicho, por lo menos, un conjunto 26' de rueda loca en la distancia "L", podría incrementarse o reducirse la fuerza ejercida por la disposición de tensión 54' en una cantidad predeterminada con objeto de modificar la longitud del conjunto 40' de cadena de la oruga, soportado entre... [Seguir leyendo]
Reivindicaciones:
un primer conjunto (18) de rodillos de la oruga, que incluye: un larguero (22) de rodillos; una rueda dentada motriz (24); por lo menos, un conjunto (26) de rueda loca conectado de forma giratoria a dicho larguero (22) de rodillos; un rodillo de soporte (32) conectado de forma giratoria a una parte superior de dicho larguero (22) de rodillos; una cadena (40) de la oruga entrenada alrededor de dicha rueda dentada motriz (24), de dicha, por lo menos, una rueda loca (26), y de dicho rodillo de soporte (32), definiendo dicha cadena (40) de la oruga una suspensión de catenaria (52); un segundo conjunto (20) de rodillos de la oruga, que comprende: un larguero (22) de rodillos; una rueda dentada motriz (24); ES 2 367 368 T3 por lo menos, un conjunto (26) de rueda loca conectado de forma giratoria a dicho larguero (22) de rodillos; un rodillo de soporte (32) conectado de forma giratoria a una parte superior de dicho larguero (22) de rodillos; una cadena (40) de la oruga entrenada alrededor de dicha rueda dentada motriz (24), dicha, por lo menos, una rueda loca (26), y dicho rodillo de soporte (32), definiendo dicha cadena (40) de la oruga una suspensión de catenaria (52); caracterizada porque dicha suspensión de catenaria (52) de dicho primer conjunto (40) de rodillos de la oruga es diferente respecto de dicha suspensión de catenaria (52) de dicho segundo conjunto (20) de rodillos de la oruga, de manera que durante el funcionamiento, el movimiento de la catenaria de dicho conjunto (40) de cadena de la oruga de dicho primer conjunto (18) de rodillos de la oruga está desfasado respecto del movimiento de la catenaria de dicho conjunto (40) de cadena de la oruga de dicho segundo conjunto (20) de rodillos de la oruga, cancelando de ese modo los efectos vibratorios del movimiento de las catenarias. 2. La disposición de tren de ruedas de la reivindicación 1, en la que la diferencia en dicha suspensión de catenaria (52), entre dicho primer conjunto (18) de rodillos y de dicho segundo conjunto (20) de rodillos, se produce situando uno de entre dicho rodillo de soporte (32) de dicho primer conjunto (18) de rodillos y dicho rodillo de soporte (32) de dicho segundo conjunto (20) de rodillos en una posición diferente respecto del otro de dicho rodillo de soporte (32) de dicho primer conjunto (18) de rodillos y dicho rodillo de soporte (32) de dicho segundo conjunto (20) de rodillos. 3. La disposición de tren de ruedas de la reivindicación 2, en la que el posicionamiento de uno entre dicho rodillo de soporte (32) de dicho primer conjunto (18) de rodillos y dicho rodillo de soporte (32) de dicho segundo conjunto (20) de rodillos, comprende el posicionamiento a una posición superior o a una posición inferior. 4. La disposición de tren de ruedas de la reivindicación 1, en la que la diferencia en dicha suspensión de catenarias (52) entre dicho primer conjunto (18) de rodillos y dicho segundo conjunto (20) de rodillos, se produce mediante el posicionamiento de uno de dichos, por lo menos, un conjunto (26) de rueda loca de dicho primer conjunto (18) de rodillos, y de uno de dichos, por lo menos, un conjunto (26) de rueda loca de dicho segundo conjunto (20) de rodillos. 5. La disposición de tren de ruedas de la reivindicación 4, en la que el posicionamiento de uno de dichos, por lo menos, un conjunto (26) de rueda loca de dicho primer conjunto (18) de rodillos, y de uno de dichos, por lo menos, un conjunto (26) de rueda loca de dicho segundo conjunto (20) de rodillos, significa el posicionamiento a una posición adelantada o a una posición atrasada. 6. La disposición de tren de ruedas de la reivindicación 5, en la que el posicionamiento de uno de dichos, por lo menos, un conjunto (26) de rueda loca de dicho primer conjunto (18) de rodillos y de uno de dichos, por lo menos, un ES 2 367 368 T3 conjunto (26) de rueda loca de dicho segundo conjunto (20) de rodillos, se produce incrementando o reduciendo la longitud de dicho larguero de rodillos de dicho primer conjunto (18) de rodillos y de dicho larguero de rodillos de dicho segundo conjunto (20) de rodillos. 7. La disposición de tren de ruedas de la reivindicación 1, en la que la diferencia en dicha suspensión de catenarias (52) entre dicho primer conjunto (18) de rodillos y dicho segundo conjunto (20) de rodillos, se produce incrementando o reduciendo la fuerza ejercida por alguna entre una disposición (54) de tensión de dicho primer conjunto (18) de rodillos y una disposición (54) de tensión de dicho segundo conjunto (20) de rodillos. 8. La disposición de tren de ruedas de la reivindicación 1, en la que desplazar alguno entre dicho, por lo menos, un conjunto (26) de rueda loca de dicho primer conjunto (18) de rodillos y dicho, por lo menos, un conjunto (26) de rueda loca de dicho segundo (20) conjunto de rodillos, se produce incrementando o reduciendo la longitud de alguno entre dicho conjunto (40) de cadena de la oruga de dicho primer conjunto (18) de rodillos y dicho conjunto (40) de cadena de la oruga de dicho segundo conjunto (20) de rodillos. 9. La disposición de tren de ruedas de la reivindicación 1, en la que la diferencia en dicha suspensión de catenaria (52) entre dicho primer conjunto (18) de rodillos y dicho segundo conjunto (20) de rodillos se produce incrementando o reduciendo el diámetro de alguno entre dicho, por lo menos, un conjunto (26) de rueda loca de dicho primer conjunto (18) de rodillos y dicho, por lo menos, un conjunto (26) de rueda loca de dicho segundo conjunto (20) de rodillos. 10. La disposición de tren de ruedas de la reivindicación 1, en la que la diferencia en dicha suspensión de catenaria (52) entre dicho primer conjunto (18) de rodillos y dicho segundo conjunto (20) de rodillos se produce incrementando o reduciendo el diámetro de alguno entre dicha rueda dentada motriz de dicho primer conjunto (18) de rodillos y dicha rueda dentada motriz de dicho segundo conjunto (20) de rodillos. 11. Método para reducir los efectos vibratorios de un primer y un segundo conjuntos (18, 20) de rodillos de oruga, de una máquina (10) de trabajo de tipo oruga, que comprende: dotar a dicho primer conjunto (18) de rodillos de la oruga de un larguero (22) de rodillos, una rueda dentada motriz (24), por lo menos una rueda loca (26) conectada de forma giratoria a dicho larguero (22) de rodillos, un rodillo de soporte (32) conectado de forma giratoria a una parte superior de dicho larguero (22) de rodillos, y una cadena (40) de la oruga entrenada alrededor de dicha rueda dentada motriz (24), de dicha, por lo menos, una rueda loca (26), y de dicho rodillo de soporte (32), definiendo dicha cadena (40) de la oruga una suspensión de catenaria (52); dotar a dicho segundo conjunto (20) de rodillos de la oruga de un larguero (22) de rodillos, una rueda dentada motriz (24), por lo menos, una rueda loca (26) conectada de forma giratoria a dicho larguero (22) de rodillos, un rodillo de soporte (32) conectado de forma giratoria a una parte superior de dicho larguero (22) de rodillos, y una cadena (40) de la oruga entrenada alrededor de dicha rueda dentada motriz (24), de dicha, por lo menos una rueda loca (26), y de dicho rodillo de soporte (32), definiendo dicha cadena (40) de la oruga una suspensión de catenaria (52); variar dicha suspensión de catenaria (52) de alguno entre un conjunto (40) de cadena de la oruga de dicho primer conjunto (18) de rodillos de la oruga y un conjunto (40) de cadena de la oruga de dicho segundo conjunto (20) de rodillos de la oruga, de manera que en funcionamiento el movimiento de la catenaria de dicha cadena (40) de la oruga de dicho primer conjunto (18) de rodillos está desfasado respecto del movimiento de la catenaria de dicho conjunto (40) de cadena de la oruga de dicho segundo conjunto (20) de rodillos de la oruga, cancelando por lo tanto los efectos vibratorios del movimiento de las catenarias. 12. El método para reducir los efectos vibratorios de un primer y un segundo conjuntos (18, 20) de rodillos de la oruga, de una máquina (10) de trabajo de tipo oruga, acorde con la reivindicación 11, en el que variar dicha suspensión de catenaria (52) de alguno de entre un primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos, incluye alargar un larguero (22) de rodillos de la oruga de alguno entre un primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos. 13. El método para reducir los efectos vibratorios de un primer y un segundo conjuntos (18, 20) de rodillos de la oruga, de una máquina (10) de trabajo de tipo oruga, acorde con la reivindicación 11, en el que variar dicha suspensión de catenaria (52) de alguno entre un primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos incluye situar un rodillo de soporte (32) de alguno entre un primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos, en una posición diferente respecto del otro entre dicho rodillo de soporte (32) de dicho primer conjunto (18) de rodillos y dicho rodillo de soporte (32) de dicho segundo conjunto (20) de rodillos. 6 ES 2 367 368 T3 14. El método para reducir los efectos vibratorios de un primer y un segundo conjuntos (18, 20) de rodillos de la oruga, de una máquina (10) de trabajo de tipo oruga, acorde con la reivindicación 11, en el que variar dicha suspensión de catenaria (52) de alguno entre un primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos, incluye incrementar o reducir la tensión de un conjunto (40) de cadena de la oruga de alguno entre un 5 primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos. 15. El método para reducir los efectos vibratorios de un primer y un segundo conjuntos (18, 20) de rodillos de la oruga, de una máquina (10) de trabajo de tipo oruga, acorde con la reivindicación 11, en el que variar dicha suspensión de catenaria (52) de alguno entre un primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos, incluye cambiar el diámetro de alguno entre una rueda dentada motriz (24) y, por lo menos, un conjunto (26) 10 de rueda loca, de alguno entre un primer conjunto (18) de rodillos y un segundo conjunto (20) de rodillos. 7 ES 2 367 368 T3 8 ES 2 367 368 T3 9 ES 2 367 368 T3
Patentes similares o relacionadas:
Rueda guía para un tren de rodaje de máquina, del 6 de Noviembre de 2019, de CATERPILLAR INC.: Una rueda guía para un tren de rodaje de una máquina, que comprende:
un eje ; y
un cuerpo separado que se extiende radialmente […]
Conjunto de rodillos de oruga con sistema de medición de desgaste, del 9 de Octubre de 2019, de CATERPILLAR INC.: Un rodillo de un sistema de tren de rodaje de orugas para una máquina , que comprende:
un cuerpo formado como un sólido de revolución alrededor […]
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Bastidor de cadena de oruga así como una máquina de trabajo con accionamiento por cadenas de oruga, del 10 de Abril de 2019, de Liebherr-Mining Equipment Colmar SAS: Bastidor de cadena de oruga para una máquina de trabajo con una cadena de oruga, que comprende al menos una vía de rodillos, particularmente dos vías de rodillos […]
Sistema de oruga con geometría variable, del 25 de Diciembre de 2013, de OTO MELARA S.P.A.: Sistema de oruga con geometría variable, que comprende:
- una correa de rueda, que comprende una sección (11p) que tiene una respectiva […]
Máquina y conjunto de oruga para su uso con ella, del 1 de Agosto de 2012, de CATERPILLAR INC.: Una oruga para un conjunto de oruga para una máquina , quecomprende:
un primer conjunto (18a, 218a, 318a, 518a, […]
UNIDAD DE DESPLAZAMIENTO TIPO ORUGA, del 6 de Febrero de 2012, de KUBOTA CORPORATION: Una unidad de desplazamiento tipo oruga que comprende: una caja del eje trasero de un cuerpo de la máquina de desplazamiento ; un tren de rodaje de la oruga […]
VEHÍCULO DE TRABAJO DE TIPO SEMIORUGA, del 11 de Marzo de 2011, de KUBOTA CORPORATION: Vehículo de trabajo de tipo semioruga que tiene un cuerpo de vehículo , una rueda de control de dirección delantera dispuesta en una posición delantera […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 VEHÍCULO DE TRABAJO DE TIPO SEMIORUGA, del 11 de Marzo de 2011, de KUBOTA CORPORATION: Vehículo de trabajo de tipo semioruga que tiene un cuerpo de vehículo , una rueda de control de dirección delantera dispuesta en una posición delantera […]
VEHÍCULO DE TRABAJO DE TIPO SEMIORUGA, del 11 de Marzo de 2011, de KUBOTA CORPORATION: Vehículo de trabajo de tipo semioruga que tiene un cuerpo de vehículo , una rueda de control de dirección delantera dispuesta en una posición delantera […]