Método y dispositivo para detectar el movimiento de vehículos.
Procedimiento para la captación del movimiento de vehículos (3) mediante un sistema de sensores devigilancia de superficies que determine la distancia entre puntos de medición individuales en al menos dos planos demedición (9,
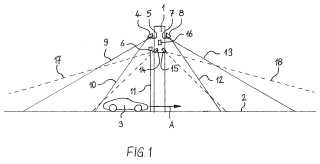
10, 11, 12, 13), cortando los planos de medición (9, 10, 11, 12, 13) una vía de circulación (2),distanciados entre sí y prependicularmente a la dirección de circulación (A), siendo determinada la dirección decirculación y la velocidad del vehículo, y generándose de ahí los datos de trayectoria, a través de la detección de laentrada del vehículo (3) en al menos dos planos de medición (9, 10, 11, 12, 13) y/o las salida del vehículo (3) de almenos dos planos de medición (9, 10, 11, 12, 13).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08022537.
Solicitante: VITRONIC DR.-ING. STEIN BILDVERARBEITUNGSSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HASENGARTENSTRASSE 14 65189 WIESBADEN ALEMANIA.
Inventor/es: SCHMUNDT,DOMINIK, DIETER,JOCHEN, KOY-OBERTHÜR,REINHARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G1/017 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › por identificación de los vehículos (G08G 1/015, G08G 1/054 tienen prioridad).
- G08G1/04 G08G 1/00 […] › que utilizan detectores ópticos o ultrasónicos.
- G08G1/052 G08G 1/00 […] › con disposiciones para determinar la velocidad o el exceso de velocidad.
PDF original: ES-2402677_T3.pdf
Fragmento de la descripción:
Método y dispositivo para detectar el movimiento de vehículos.
La invención se refiere a un procedimiento, así como a un dispositivo para la captación del movimiento de vehículos mediante un sistema de sensores de vigilancia múltiple de superficies.
Un procedimiento de ese tipo, y un dispositivo análogo son conocidos del documento DE 101 48 289 A1. En este caso se utiliza un sistema de sensores con un sensor de medición por láser de vigilancia múltiple de superficies, extendiéndose el sistema de sensores sobre un plano de medición en forma de abanico, el cual configura una línea de intersección con la vía de circulación, aproximadamente a lo largo de la dirección de la vía de circulación. El plano de medición está además inclinado hacia el plano de la vía de circulación. A través de esto, un vehículo puede ser seguido tras la entrada en el plano de medición configurado por el sensor de medición por láser, hasta que el vehículo salga nuevamente del plano de medición. En este caso, el vehículo se desplaza continuamente en el plano de medición, de forma que, basándose en los datos de medición captados, se puede estimar la posición, la velocidad y la geometría del vehículo. Tras la salida del plano de medición, el vehículo pasa a través de un pórtico en el cual está previsto, junto al sensor de medición por láser citado al principio, otro sensor de medición por láser, el cual extiende un plano de medición transversalmente a la dirección de la vía de circulación, estando alineado el plano de medición en posición vertical y aproximadamente perpendicular a la vía de circulación. Ese sensor de medición por láser capta entonces el contorno exacto del vehículo, a fin de poder clasificar el mismo, y poder diferenciar por ejemplo a los vehículos obligados a abonar peaje de los no obligados a pagar peaje.
No obstante, es un inconveniente que los vehículos pequeños puedan circular entre los planos de medición de los distintos sensores de medición por láser, sin que sean captados, o bien sólo sean captados insuficientemente por los sensores de medición por láser.
El documento US 2005/0285738 A1 publica un procedimiento para la captación de vehículos mediante rayos láser, los cuales detectan la distancia entre diferentes puntos de medición en varios puntos de medición. Para ello se divide un rayo láser en varios rayos láser individuales. El rayo laser se divide sobre dos conductores de ondas de luz mediante un "splitter". Los dos rayos láser son conducidos entonces a través de orificios a un espejo y a través de una lente, hasta que alcanzan la superficie de la carretera.
El documento US 6 304 321 B1 publica un procedimiento para la clasificación y para la realización de un perfil 3D de vehículos mediante un sistema de sensores de vigilancia de superficies, el cual determina la distancia entre distintos puntos de medición en al menos dos planos de medición. Los dos planos de medición están situados distanciados entre sí, y cortan a la vía de circulación perpendicularmente a la dirección de circulación. Se detecta la entrada de un vehículo en los dos planos de medición, y de determina de aquí la velocidad. Además, los planos de medición sirven para realizar un perfil tridimensional en tres dimensiones de un vehículo que pasa por ahí. A través de ello pueden dividirse los vehículos en distintas clases de vehículos, como por ejemplo automóviles, camiones y motocicletas.
La publicación de Gilbert, R. K. et al. "Measurement of Vehicle Trajectories using 3-D Laser Radar" publica un procedimiento para la captación del movimiento de vehículos mediante varios sistemas de sensores que vigilan el espacio, los cuales determinan la distancia de puntos de medición individuales en al menos un espacio de medición. Los espacios de medición tridimensionales están dirigidos sobre una vía de circulación, siendo detectada la entrada y la salida de un vehículo en el espacio de medición. Además un vehículo es seguido en cuanto entra en un espacio de medición, hasta que ha salido nuevamente del espacio de medición. A través del seguimiento del vehículo se puede determinar la dirección de circulación y la velocidad del mismo, y de aquí generar los datos de trayectoria.
El objetivo de la presente invención es por tanto el poner a disposición un procedimiento de medición más tupido y flexible, y un dispositivo correspondiente.
El objetivo se alcanza, según la invención, a través de un procedimiento para la captación del movimiento de vehículos mediante un sistema de sensores de vigilancia de superficies que determine la distancia entre puntos de medición individuales en al menos dos planos de medición, cortando los planos de medición una vía de circulación, distanciados entre sí y prependicularmente a la dirección de circulación, siendo determinada la dirección de circulación y la velocidad del vehículo a través de la detección de la entrada del vehículo en los planos de medición y/o las salida del vehículo de los planos de medición.
Los planos de medición están dispuestos perpendicularmente a la dirección de la vía de circulación, es decir, la línea respectiva de corte de un plano de medición con la vía transcurre en un ángulo respecto a la dirección de la vía de circulación, y con ello se desvía de la dirección de la vía de circulación. Las líneas de corte de los planos de medición con la vía de circulación pueden transcurrir en ello perpendicularmente a la dirección de la vía de circulación. A través de la disposición de los planos de medición perpendicularmente a la dirección de la vía de circulación se asegura que cada vehículo ha de atravesar los planos de medición. Con ello se garantiza que se detectan también los vehículos pequeños. Debido a que al menos dos planos de medición están dispuestos de forma que cortan distanciados entre sí a la vía de circulación, y con ello están dispuestos uno tras otro vistos en la dirección de la vía de circulación, puede determinarse fácilmente la velocidad, por ejemplo a través de la determinación del momento de la entrada en los dos planos de medición. Además se determinan las posiciones en las que el vehículo penetra en los planos de medición respectivos, de forma que puede deducirse también la dirección de circulación al pasar por al menos dos planos de medición.
En una configuración concreta está previsto que la entrada de un vehículo en el primer plano de medición y/o la salida del vehículo del primer plano de medición sea detectada mediante el sistema de sensores de vigilancia de superficies, que la entrada de un vehículo en el segundo plano de medición y/o la salida del vehículo del segundo plano de medición sea detectada mediante el sistema de sensores de vigilancia de superficies, y que de aquí se determine la dirección de circulación y la velocidad del vehículo, sobre la base de los datos de medición, y de allí se generen los datos de trayectoria para el procesamiento posterior. El primer y el segundo plano de medición, los cuales son utilizados para la determinación de la dirección de circulación y la velocidad, pueden ser en principio cualquiera de los planos de medición del conjunto de los planos de medición. No obstante se utilizan preferentemente los planos de medición que son atravesados en primer lugar por el vehículo.
Al detectar la entrada en uno de los planos de medición y/o la salida de uno de los planos de medición, se determinan el respectivo momento y el respectivo lugar de la entrada y/o de la salida, y se ponen a disposición como datos de medición, por ejemplo a una unidad de cálculo.
En particular, está previsto preferentemente que la entrada de un vehículo en el primer plano de medición sea detectada, y los primeros datos de entrada sean enviados a una unidad central de control, que la entrada de un vehículo en el segundo plano de medición sea detectada, y los segundos datos de entrada sean enviados a una unidad central de control, que la salida del vehículo del segundo plano de medición sea detectada, y los segundos datos de salida sean enviados a una unidad central de control, y que los datos de la trayectoria del vehículo sean determinados a través de la estimación de la velocidad y de la dirección de circulación del vehículo, sobre la base de los datos de entrada y de los datos de salida. Cuando estén previstos más de dos planos de medición, se determinan correspondientemente más datos de entrada y más datos de salida. La sucesión en el tiempo puede ser por supuesto variable. Los planos de medición pueden estar tan distanciados entre sí que un vehículo salga del primer plano de medición y a continuación de ello entre en el segundo plano... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la captación del movimiento de vehículos (3) mediante un sistema de sensores de vigilancia de superficies que determine la distancia entre puntos de medición individuales en al menos dos planos de medición (9, 10, 11, 12, 13) , cortando los planos de medición (9, 10, 11, 12, 13) una vía de circulación (2) , distanciados entre sí y prependicularmente a la dirección de circulación (A) , siendo determinada la dirección de circulación y la velocidad del vehículo, y generándose de ahí los datos de trayectoria, a través de la detección de la entrada del vehículo (3) en al menos dos planos de medición (9, 10, 11, 12, 13) y/o las salida del vehículo (3) de al menos dos planos de medición (9, 10, 11, 12, 13) .
2. Procedimiento según la reivindicación 1, caracterizado porque la entrada de un vehículo (3) en el primer plano (9) de medición y/o la salida del vehículo (3) del primer plano (9) de medición es detectada mediante el sistema de sensores de vigilancia de superficies, porque la entrada del vehículo (3) en el segundo plano (10) de medición, de los al menos dos planos de medición, y/o la salida del vehículo (3) del segundo plano de medición (10) es detectada mediante el sistema de sensores de vigilancia de superficies, y que de aquí se estime la dirección de circulación y la velocidad del vehículo (3) , sobre la base de los datos de medición de los dos planos de medición (9, 10) .
3. Procedimiento según una de las reivindicaciones 1 o 2, caracterizado porque al detectar la entrada en uno de los planos de medición (9, 10, 11, 12, 13) y/o la salida de uno de los planos de medición (9, 10, 11, 12, 13) , se determina el momento y el lugar de la entrada y/o de la salida, los cuales sirven de base para la determinación de los datos de trayectoria.
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque la entrada de un vehículo (3) en un primer plano de medición (9) , de los al menos dos planos de medición, es detectada, y los primeros datos de entrada son enviados a una unidad central de control, que la salida del vehículo (3) del primer plano de medición (9) es detectada, y los primeros datos de salida son enviados a una unidad central de control, que la entrada del vehículo (3) en un segundo plano de medición (10) , de los al menos dos planos de medición, es detectada, y los segundos datos de entrada son enviados a una unidad central de control, que la salida del vehículo (3) del segundo plano de medición (10) es detectada, y los segundos datos de salida son enviados a una unidad central de control, y que los datos de la trayectoria del vehículo (3) son determinados a través de la estimación de la velocidad y de la dirección de circulación del vehículo, sobre la base de los datos de entrada y de los datos de salida.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque los datos de geometría del vehículo (3) son captados en un plano de medición (11) de captación de contornos del sistema de sensores, y porque los datos de geometría son asignados a los datos de trayectoria del vehículo (3) .
6. Procedimiento según la reivindicación 5, caracterizado porque el sistema de sensores comprende al menos tres planos de medición (9, 10, 11, 12, 13) siendo captados los datos de trayectoria en al menos dos de los planos de medición (9, 10, 11, 12, 13) , y los datos de geometría en al menos uno de los planos de medición (11) .
7. Procedimiento según la reivindicación 5 ó 6, caracterizado porque uno de los planos de medición (11) está alineado verticalmente respecto a la vía (2) de circulación, siendo captados los datos de geometría al menos en el plano de medición (11) alineado verticalmente.
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado porque son captadas imágenes del vehículo (3) , especialmente del número de matrícula del vehículo 3, y porque las imágenes son asignadas a los datos de trayectoria del vehículo.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado porque se realiza un intercambio de datos de comunicación entre una instalación de comunicación (16) y una unidad de comunicación prevista en el vehículo (3) , y porque los datos de comunicación son asignados a los datos de trayectoria del vehículo (3) .
10. Dispositivo para la captación de la geometría y del movimiento de vehículos, comprendiendo: al menos un sistema de sensores de vigilancia de superficies que determina la distancia entre distintos puntos de medición en al menos dos planos de medición (9, 10, 11, 12, 13) , cortando los planos de medición (9, 10, 11, 12, 13) a una vía de circulación (2) a cierta distancia entre sí y perpendicularmente a la dirección (A) de la vía de circulación, así como una unidad de cálculo mediante la cual, a través de la detección de la entrada de un vehículo (3) en al menos dos de los planos de medición (9, 10, 11, 12, 13) y/o la salida del vehículo de al menos dos de los planos de medición (9, 10, 11, 12, 13) , se detemina la dirección de circulación y la velocidad del vehículo.
11. Dispositivo según la reivindicación 10, caracterizado porque el sistema de sensores comprende al menos dos sensores de vigilancia de superficies, (4, 5, 6, 7, 8) los cuales determinan respectivamente la distancia entre los distintos puntos de medición.
12. Dispositivo según una de las reivindicaciones 10 a 11, caracterizado porque el sistema de sensores está configurado de tal manera que los planos de medición (9, 10, 11, 12, 13) están inclinados de forma diferente respecto a la vía (2) de circulación.
13. Dispositivo según una de las reivindicaciones 10 a 12, caracterizado porque está previsto al menos un sensor (6) que determina el contorna de los vehículos (3) .
14. Dispositivo según una de las reivindicaciones 10 a 13, caracterizado porque el sistema de sensores está configurado de tal manera que dos planos de medición (9, 10) están orientados de forma inclinada respecto a la vía
(2) de circulación, en la dirección de la vía de circulación, un plano de medición (11) verticalmente a la misma, y dos planos de medición (12, 13) están orientados de forma inclinada respecto a la vía de circulación, en contra de la dirección de la vía de circulación.
15. Dispositivo según una de las reivindicaciones 10 a 14, caracterizado porque está previsto al menos un sensor (14, 15) que proporciona imágenes para la captación de una imagen del vehículo (3) , especialmente el 10 número de matrícula del vehículo (3) .
16. Dispositivo según la reivindicación 15, caracterizado porque el sensor (14, 15) que proporciona imágenes y el sistema de sensores están acoplados de tal forma que, a través de la detección de la entrada de un vehículo (3) en el primer plano de medición (9) , se dispara el sensor (14, 15) que proporciona imágenes.
17. Dispositivo según una de las reivindicaciones 10 a 16, caracterizado porque está previsto exactamente un
pórtico (1) que se extiende sobre la vía (2) de circulación perpendicularmente a la dirección (A) de la circulación, y sobre el que está colocado el sistema de sensores sobre la vía de circulación.
Patentes similares o relacionadas:
Sistema y dispositivo de señales para la entrada y salida de vehículos de un aparcamiento, del 17 de Diciembre de 2019, de RODRIGUEZ BARROS, ALEJANDRO: Sistema de señales para la entrada y salida de vehículos de un aparcamiento, comprende dispositivos activos asociados a unos elementos pasivos (P1), (BL2), (RU) y a un […]
 Identificación de vehículo, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un método para identificar un transmisor alojado en vehículo que emite una señal de interferencia sobre una banda de frecuencia predefinida, comprendiendo el método
monitorizar […]
Identificación de vehículo, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un método para identificar un transmisor alojado en vehículo que emite una señal de interferencia sobre una banda de frecuencia predefinida, comprendiendo el método
monitorizar […]
Interfaz de búsqueda y reproducción de vídeo para la supervisión de vehículos, del 6 de Mayo de 2019, de HONEYWELL INTERNATIONAL INC.: Un procedimiento, que comprende: grabar fragmentos de vídeo respectivos de un área supervisada a partir de cada una cámara de una pluralidad de cámaras; proporcionar […]
Un sistema para uso en puestos de peajes de carretera, del 21 de Febrero de 2019, de KAPSCH TRAFFICCOM AB: Un sistema para su uso en puestos de peajes de carretera, que comprende un primer aparato óptico para grabar imágenes de una calzada y un segundo […]
Identificadores de comunicación de vehículos en base a la información de la placa de matrícula, del 14 de Febrero de 2019, de Nokia Technologies OY: Un procedimiento que comprende: recibir, desde un sensor, una imagen de un vehículo que incluye información de identificación del vehículo ; […]
Sistema de identificación y/o monitorización de vehículo, del 23 de Octubre de 2018, de Licensys Australasia Pty Ltd: Un aparato el cual puede funcionar para detectar e identificar vehículos, donde los vehículos individuales tienen cada uno al menos un dispositivo de comunicación RFID con una […]
Sistema mejorado para identificar un vehículo, del 17 de Octubre de 2018, de I.CAR S.r.l. (100.0%): Un sistema de identificación para un vehículo, que comprende: - al menos un elemento de identificación accesible para ser aplicado, […]
Procedimiento para la asignación de un emisor a un objeto a detectar, en la comunicación de vehículo a vehículo, y vehículo, del 23 de Mayo de 2018, de AUDI AG: Procedimiento para la asignación de un emisor, el cual transmite al menos una información de comunicación en una comunicación de vehículo a vehículo, a un objeto descrito mediante […]