Método de control para un sistema de dirección.
Método para controlar un dispositivo de dirección con medios (7,
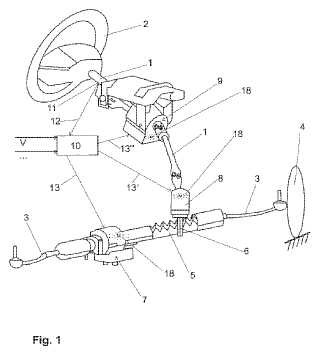
8, 9) de dirección asistida para un vehículo automóvil con al menos una rueda dirigible (4), comprendiendo el dispositivo de dirección:
- un árbol (1) de dirección con un primer extremo para adoptar un volante (2) y con un segundo extremo que está acoplado a un piñón (6), en el que dicho piñón (6) está aplicado en una cremallera (5), en el que dicha cremallera (5) es ajustable, en su dirección longitudinal, a diferentes posiciones, mediante lo cual gira dicha al menos una rueda (4), mediante lo cual, en una posición media (R0) de dicha cremallera, dicha rueda (4) está girada como para dirigir el vehículo en una dirección recta hacia delante,
- un dispositivo (10) de control que controla dichos medios (7, 8, 9) de asistencia,
- medios (11) de detección que detectan el par torsor introducido en dicho árbol (1) de dirección,
- medios de detección que detectan la velocidad (V) del vehículo,
- medios para determinar dicha posición (R) de la cremallera, y
- un dispositivo para determinar la carga instantánea (FR) de cremallera en su dirección longitudinal, que es introducida por dicha rueda dirigible (4);
caracterizado por los siguientes pasos:
- se determina la diferencia entre dicha posición media (R0) y la posición instantánea (R) de la cremallera,
- si la diferencia es inferior a un valor () de umbral y si la velocidad (V) del vehículo es superior a un valor (Vmin) de umbral, el valor instantáneo de la carga (FR) de cremallera se almacena en el dispositivo (10, 16) de control como valor de desviación que se usa para calcular la carga compensada de cremallera.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10000792.
Solicitante: THYSSENKRUPP PRESTA AG.
Nacionalidad solicitante: Liechtensein.
Dirección: 9492 Eschen LIECHTENSTEIN.
Inventor/es: BENYO,IRME, ARÁNYI,MIKLÓS, SZEPESSY,IMRE, SZABOLCS,DÓRA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
- B62D6/04 B62D […] › B62D 6/00 Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00). › reaccionando únicamente a las fuerzas que perturban la dirección deseada del vehículo, p. ej. fuerzas que actúan transversalmente a la dirección de desplazamiento del vehículo.
PDF original: ES-2404606_T3.pdf
Fragmento de la descripción:
Método de control para un sistema de dirección.
La invención trata de un dispositivo y de un método para controlar un dispositivo de dirección con medios de dirección asistida para un vehículo automóvil con al menos una rueda dirigible, que comprende:
- un árbol de dirección con un primer extremo para adoptar un volante y con un segundo extremo que está acoplado con un piñón, en el que dicho piñón está aplicado en una cremallera, en el que dicha cremallera es ajustable, en su dirección longitudinal, a diferentes posiciones, por lo que la dicha al menos una rueda gira, por lo que, en una posición media de dicha cremallera, dicha rueda gira como para dirigir el vehículo en una dirección recta hacia delante;
- un dispositivo de control que controla dichos medios de asistencia;
- medios de detección que detectan el par torsor introducido en dicho árbol de dirección;
- medios de detección que detectan la velocidad del vehículo;
- medios para determinar dicha posición de dicha cremallera.
Un problema básico en tales dispositivos de dirección es evitar perturbaciones en la sensación del conductor en casos de viento lateral o de inclinación transversal de la calzada. El problema se soluciona generalmente mediante una "compensación de deriva de arrastre".
Descripción de técnica relacionada El documento EP 1930229 A2 describe una solución para compensar tales perturbaciones. De acuerdo con la descripción, el par torsor del volante se reduce mediante un valor de compensación que se integrará por un tiempo determinado. El valor integrado se usa como valor de compensación para compensar las fuerzas introducidas por viento lateral o por inclinación transversal de la calzada.
Un problema de tal solución consiste en la lenta funcionalidad de este método de compensación. Además, el valor de compensación depende de la duración de tiempo de las perturbaciones, y el valor varía en el tiempo. Esto puede dar como resultado una discrepancia entre las expectativas y la sensación de la dirección en el conductor.
El documento DE 102006017010 A1 describe un método para compensar las fuerzas estáticas de dirección en una dirección, por ejemplo, las resultantes por un viento lateral o por una inclinación transversal de la calzada. La descripción propone aumentar o disminuir la potencia del motor eléctrico que es responsable de la fuerza de servodirección. Este documento no describe cómo se controla el aumento o la disminución de potencia del motor eléctrico. Además, el método necesita un tiempo para detectar el estado estático del sistema.
El documento EP 1860018 A2 describe un método de estabilización del comportamiento del vehículo realizando un servo-control de modo que el verdadero par torsor de auto-alineamiento siga un estándar de par torsor de autoalineamiento focalizando la atención en el par torsor de auto-alineamiento del vehículo. El documento propone solucionar el problema detectando o estimando un valor de par torsor de auto-alineamiento y calcula un valor de par torsor de auto-alineamiento estándar basado en un ángulo de dirección y en la velocidad del vehículo, y corrige el valor nominal actual. Este método no es adecuado para mejorar el comportamiento de conducción en caso de viento lateral o de inclinación lateral de la calzada.
El documento EP 1932745 A2 describe el preámbulo de la reivindicación 1.
Sumario de la invención La invención ha sido implementada en vista de las circunstancias anteriormente descritas y es un objeto de la invención proporcionar un método de control de la dirección y un dispositivo de dirección que puedan mejorar el comportamiento de un vehículo en los casos de viento lateral o de inclinación transversal de la calzada.
El objeto de la invención se consigue mediante un método de acuerdo con la reivindicación 1 y mediante un dispositivo con las características de la reivindicación 10. Las reivindicaciones dependientes describen aspectos ventajosos de la invención.
La solución del objeto consiste en un método de control en el que el dispositivo de dirección comprende adicionalmente un dispositivo para determinar la carga instantánea de cremallera en su dirección longitudinal, que se introduce mediante dicha rueda dirigible, y se determina la diferencia entre las mencionadas posición media y posición instantánea de la cremallera; si la diferencia es inferior a un valor de umbral y la velocidad del vehículo es superior a un valor de umbral, el valor instantáneo de carga de cremallera se almacena dentro del dispositivo de control como un valor de desviación.
Adicionalmente, la solución del objeto consiste en un dispositivo de dirección en el que el dispositivo comprende un dispositivo para determinar la carga instantánea de cremallera en su dirección longitudinal, que se introduce mediante dicha rueda dirigible; y unos medio de cálculo de la diferencia para calcular la diferencia entre dicha posición media y dicha posición instantánea de la cremallera; unos primeros medios de comprobación para comprobar si la diferencia es inferior a un valor de umbral; unos segundos medios de comprobación para comprobar si la velocidad del vehículo es superior a un valor de umbral; y unos medios de emisión, que emiten la carga instantánea de cremallera al dispositivo de almacenamiento como un valor de desviación, si los resultados de los primeros y de los segundos medios son verdaderos.
El valor virtual de carga de cremallera, que se usa para controlar el dispositivo de dirección, es igual a la carga instantánea medida o calculada de cremallera reducida mediante el valor determinado de desviación o de una parte del valor determinado de desviación, que se calculan y almacenan como se describió anteriormente, si los resultados de los primeros y segundos medios son verdaderos. El par torsor de apoyo de dirección se calcula en base a este valor virtual de carga de cremallera (= carga compensada de cremallera) .
Un aspecto de la invención consiste en el nivel de compensación. Podría ser favorable compensar la deriva de arrastre sólo en parte. Tal parte podría ser desde 0% del valor de compensación de carga instantánea calculada de cremallera hasta 100% del valor de compensación de carga instantánea calculada de cremallera. En una realización preferida, la parte es 0% en caso de que el vehículo esté en posición de marcha recta hacia delante o en caso de que el valor de compensación de carga instantánea calculada de cremallera sea menor que un valor (0, 5 Nm, por ejemplo) de umbral. La compensación podría alcanzar el 100% si el valor de compensación de carga instantánea calculada de cremallera es mayor que otro valor (3 Nm, por ejemplo) de umbral.
Como resultado de la aplicación de tales dispositivo y/o método, las perturbaciones temporales, como viento lateral o inclinación transversal de calzada, se compensan. El conductor no tiene que compensar él mismo tales perturbaciones. La compensación de acuerdo con la invención tiene una alta agilidad. Para evitar vibraciones, el procedimiento de cálculo, en una realización preferida, se filtra con un filtro de paso bajo. En una realización preferida adicional, el tiempo constante para la función de filtro es 5 segundos, o, más preferida, 3 segundos. Mediante tales tiempos de integración, el conductor obtiene la sensación de un viento lateral o de una inclinación transversal de calzada y una rápida compensación de tales perturbaciones. No obstante sea una situación crítica de conducción, para la que se considera se tiene aproximadamente la misma reacción que, por ejemplo, a un bache, no se introduce un valor erróneo de desviación para el valor de carga de cremallera.
Otro aspecto de la invención consiste en los valores límites de umbral para comenzar el procedimiento de ajuste para el valor de desviación de carga de cremallera. En una realización preferida de la invención, el valor instantáneo de carga de cremallera se almacena en el dispositivo de control como un valor de desviación sólo si el valor instantáneo de carga de cremallera es superior al valor de umbral. Haciendo referencia a este aspecto de la invención, el dispositivo de dirección comprende adicionalmente unos terceros medios de comprobación para comprobar si el valor instantáneo de la carga de cremallera es superior a un valor de umbral del valor instantáneo, y los medios de emisión emiten la carga instantánea de cremallera al dispositivo de almacenamiento como un valor de desviación, si el resultado de los primeros, los segundos y dichos terceros medios de comprobación fueran verdaderos.
En una realización preferida de la invención, el valor de umbral para la velocidad... [Seguir leyendo]
Reivindicaciones:
1. Método para controlar un dispositivo de dirección con medios (7, 8, 9) de dirección asistida para un vehículo automóvil con al menos una rueda dirigible (4) , comprendiendo el dispositivo de dirección:
- un árbol (1) de dirección con un primer extremo para adoptar un volante (2) y con un segundo extremo que está acoplado a un piñón (6) , en el que dicho piñón (6) está aplicado en una cremallera (5) , en el que dicha cremallera (5) es ajustable, en su dirección longitudinal, a diferentes posiciones, mediante lo cual gira dicha al menos una rueda (4) , mediante lo cual, en una posición media (R0) de dicha cremallera, dicha rueda (4) está girada como para dirigir el vehículo en una dirección recta hacia delante,
- un dispositivo (10) de control que controla dichos medios (7, 8, 9) de asistencia,
- medios (11) de detección que detectan el par torsor introducido en dicho árbol (1) de dirección,
- medios de detección que detectan la velocidad (V) del vehículo,
- medios para determinar dicha posición (R) de la cremallera, y
- un dispositivo para determinar la carga instantánea (FR) de cremallera en su dirección longitudinal, que es introducida por dicha rueda dirigible (4) ;
caracterizado por los siguientes pasos:
- se determina la diferencia entre dicha posición media (R0) y la posición instantánea (R) de la cremallera,
2. Método para controlar un dispositivo de dirección de acuerdo con la reivindicación 1, caracterizado porque el valor instantáneo de la carga (FR) de cremallera se almacena en el dispositivo (10, 16) de control como valor de desviación si, adicionalmente, el valor instantáneo medido o determinado de carga de cremallera es superior a un valor de umbral.
3. Método para controlar un dispositivo de dirección de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el valor de desviación se usa parcialmente o al 100% en el dispositivo (10, 16) de control para calcular una desviación para un par torsor o momento de asistencia para reducir el par torsor manual de volante para el conductor.
4. Método para controlar un dispositivo de dirección de acuerdo con la reivindicación 3, caracterizado porque el valor de desviación se añade parcialmente o al 100% al par torsor o momento de asistencia.
5. Método para controlar un dispositivo de dirección de acuerdo con las reivindicaciones 3-4, caracterizado porque el valor de desviación se usa sólo a velocidades (V) de vehículo de entre, e incluyéndolas, 30 km/h y 200 km/h.
6. Método para controlar un dispositivo de dirección de acuerdo con las reivindicaciones 3-5, caracterizado porque el valor de desviación se usa sólo en desplazamientos de cremallera de más de 0, 1 mm a partir de la posición central o media, preferiblemente de más de 1 mm, y especialmente de más de 5 mm.
7. Método para controlar un dispositivo de dirección de acuerdo con las reivindicaciones 3-6, caracterizado porque el valor de desviación se usa sólo por debajo de cargas máximas de cremallera definidas por pares torsores de columna de dirección de menos de 20 Nm, preferiblemente de menos de 10 Nm.
8. Método para controlar un dispositivo de dirección de acuerdo con las reivindicaciones 3-7, caracterizado porque el valor de desviación se usa sólo por encima de cargas mínimas de cremallera definidas por pares torsores de columna de dirección de más de 2 Nm, preferiblemente de más de 1 Nm, y especialmente más de 0, 1 Nm.
9. Método para controlar un dispositivo de dirección de acuerdo con las reivindicaciones 3-8, caracterizado porque la carga (FR) mínima y máxima de cremallera y la velocidad (V) mínima y máxima de vehículo son comprobadas antes de comenzar el procedimiento de ajuste para el valor de desviación de carga de cremallera.
10. Dispositivo de dirección con medios (7, 8, 9) de dirección asistida para un vehículo automóvil con al menos una rueda dirigible (4) , que comprende:
- un árbol (1) de dirección con un primer extremo para adoptar un volante (2) y con un segundo extremo acoplado con un piñón (6) , en el que dicho piñón (6) está aplicado en una cremallera (5) , en el que dicha cremallera (5) es ajustable, en su dirección longitudinal, a diferentes posiciones, mediante lo cual gira dicha al menos una rueda (4) , mediante lo cual, en una posición media de dicha cremallera (5) , dicha rueda (4) está girada como para dirigir el
vehículo en una dirección recta hacia delante;
- un dispositivo (10, 16) de control que controla dichos medios (7, 8, 9) de asistencia, que comprende un dispositivo de almacenamiento,
- medios (11) de detección que detectan el par torsor (12) introducido en dicho árbol (1) de dirección, 5 - medios de detección que detectan la velocidad (V) del vehículo, y
- medios para determinar dicha posición (R) de la cremallera (5) ; caracterizado porque:
- el dispositivo de dirección comprende adicionalmente un dispositivo para determinar la carga instantánea (FR) de cremallera en su dirección longitudinal, que es introducida por dicha rueda dirigible,
- unos medios de cálculo de diferencia para calcular una diferencia entre dicha posición media (R0) y una posición instantánea (R) de la cremallera (5) ,
- unos segundos medios de comprobación para comprobar si la velocidad (V) del vehículo es superior a un valor de umbral de velocidad, y
-unos medios de emisión, que emiten la carga instantánea (FR) de cremallera al dispositivo de almacenamiento como un valor de desviación que se usa para calcular la carga compensada de cremallera, si los resultados de los primeros, segundos y terceros medios de comprobación son verdaderos.
11. Dispositivo de dirección de acuerdo con la reivindicación 10, caracterizado porque el dispositivo de dirección comprende adicionalmente unos terceros medios de dirección para comprobar si el valor instantáneo de carga (FR)
de cremallera es superior a un valor de umbral y porque los medios de emisión emiten la carga instantánea (FR) de cremallera al dispositivo de almacenamiento como valor de desviación, si el resultado de los terceros medios de comprobación es también verdadero.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]