Manipulador de conducción de un vehículo.
Manipulador de conducción de un vehículo que comprende :
- un dispositivo de tratamiento (56) de hombre muerto automático por control de mantenimiento de apoyo ;
- un brazo de palanca (20) capaz de desplazarse según una dirección de accionamiento predeterminada (16, 18) ;
- un mango (24) dispuesto en un extremo (26) del brazo (20) y de forma externa adaptada a la forma de la palma de una mano ; comprendiendo el mango (24) : una base (28) generalmente tubular que se extiende según el eje del brazo (20), una cabeza (30), dispuesta por encima de la base (28), de forma ovoide y de eje mayor inclinado con respecto a la base (28), una cara superior (40) situada en la cabeza (30) y en la parte opuesta del brazo de palanca (20) con respecto al mango (24), al menos una cara lateral (42, 44, 46, 48) globalmente perpendicular a la cara superior (40), y una tecla táctil (32) conectada eléctricamente al dispositivo de tratamiento (56) de hombre muerto automático por control de mantenimiento de apoyo y dispuesta al nivel de una cara lateral (46, 48) paralela al plano (P) de accionamiento que contiene la dirección de accionamiento (16, 18) y el eje mayor de la cabeza (30), caracterizado por el hecho de que la tecla táctil (32) está situada en la cabeza (30) de forma ovoide.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09166105.
Solicitante: ALSTOM TRANSPORT SA.
Nacionalidad solicitante: Francia.
Dirección: 3, AVENUE ANDRE MALRAUX 92300 LEVALLOIS-PERRET FRANCIA.
Inventor/es: MIGLIANICO, DENIS, DELEMOTTE,JEAN-MICHEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05G9/047 FISICA. › G05 CONTROL; REGULACION. › G05G DISPOSITIVOS O SISTEMAS DE CONTROL EN LA MEDIDA EN QUE SUS CARACTERISTICAS SON UNICAMENTE MECANICAS ("mecanismos "Bowden" o similares F16C 1/10; engranajes o mecanismos no especializados con este fin F16H; mecanismos de cambio de velocidad o de inversión para transmisiones que transmiten movimientos rotativos F16H 59/00 - F16H 63/00). › G05G 9/00 Mecanismos de control maniobrados a mano equipados de un solo órgano de control que trabajan con varios órganos controlados, p. ej. selectivamente, simultáneamente. › pudiendo ser accionado a mano el órgano de control alrededor de ejes ortogonales, p. ej. palancas de mando ("joysticks").
- H01H9/06 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 9/00 Detalles de los dispositivos de conmutación no cubiertos por H01H 1/00 - H01H 7/00. › Envolturas de interruptor constituido por un mango que tiene otro propósito que el de accionar el interruptor, p. ej. por el mango de un aspirador.
PDF original: ES-2441965_T3.pdf
Fragmento de la descripción:
Manipulador de conducción de un vehículo [0001] La invención se refiere a un manipulador de conducción de un vehículo, en especial un vehículo ferroviario, y el procedimiento de maniobra correspondiente, comprendiendo el manipulador de conducción un elemento integrado de control de hombre muerto Automático por control de mantenimiento de apoyo (VACMA) .
Clásicamente, los dispositivos de conducción de trenes o de tranvías instalados a bordo de las cabinas de pilotaje comprenden un sistema VACMA de hombre muerto automático por control de mantenimiento de apoyo mediante el cual se controla regularmente la vigilancia del conductor.
El conductor se ve obligado a mantener presionado un elemento de control, en forma de botón manual o de pédale durante una duración comprendida entre 15 y 60 segundos, y luego soltarlo regularmente durante una duración típicamente de 2 segundos a 5 segundos, para verificar que el conductor no se ha dormido o incluso muerto y en activar en el caso de un fallo de vigilancia una parada de urgencia del vehículo.
Es conocido que esta obligación conlleva restricciones de fatiga física y psíquica para el conductor durante la conducción.
Con la finalidad de mejorar la ergonomía ligada a la conducción del vehículo y a la activación de la orden de hombre muerto automático, el documento EP 169 0820 A propone integrar la orden de hombre muerto automática en el mango de conducción en tracción y en frenado en la forma de una tecla táctil.
Sin embargo, el documento no describe una arquitectura geométrica detallada del conjunto mango de conducción / tecla táctil de control de hombre muerto que garantice una ergonomía de calidad, es decir que implique un esfuerzo de tensión / flexión muscular mínima para el conductor.
El estado de la técnica más cercano es el documento EP 1 400 426 que describe un manipulador de conducción según el preámbulo de la reivindicación 1.
El problema técnico es determinar una arquitectura geométrica del conjunto constituido por el mango de conducción y la tecla táctil que sea ergonómico para un sistema VACMA.
A tal efecto, la invención tiene por objeto un manipulador de conducción de un vehículo que comprende un dispositivo de tratamiento de hombre muerto automático por control de mantenimiento de apoyo y un brazo de palanca capaz de desplazarse según una dirección de accionamiento predeterminada con, dispuesto en un extremo del brazo, un mango, de forma externa adaptada a la forma de la palma de una mano según la reivindicación 1.
Según unos modos particulares de realización, el manipulador de conducción comprende una o varias de las características siguientes :
- el mango es simétrico con respecto a un plano de simetría que contiene la dirección de accionamiento y la distancia de la tecla táctil al plano de simetría es inferior a 25 mm ;
- el manipulador comprende un elemento de soporte con respecto al cual el mango es móvil y el mango presenta una posición de referencia en la cual el brazo de palanca está dispuesto normal con respecto al plano del elemento de soporte y, en la posición de referencia, la distancia de la tecla táctil al elemento de soporte es inferior o igual a 95 mm ;
- la tecla táctil es sensible al tacto ;
- el ángulo a formado por el plano de extensión del elemento soporte y el eje mayor de la cabeza está comprendido entre 5 grados y 85 grados ;
- el mango es hueco y la tecla táctil puede ser conectada eléctricamente en el interior del mango por un cable eléctrico ;
- el brazo de palanca es hueco para suministrar un paso a un cable eléctrico conectado a la tecla táctil, siendo el paso inaccesible desde el exterior ;
- el dispositivo de tratamiento comprende un relé electromecánico o un elemento electrónico capaz de detectar un paso de corriente durante un apoyo sobre la tecla táctil ; y
- el dispositivo de tratamiento comprende un relé electromecánico o un elemento electrónico capaz de detectar un corte de corriente durante un apoyo sobre la tecla táctil.
La invención se comprenderá mejor con la lectura de la descripción de una única forma de realización siguiente, ofrecida únicamente a título de ejemplo y hecha haciendo referencia a los dibujos en los cuales :
- la figura 1 es una vista en perspectiva de un manipulador de conducción según la invención, -la figura 2 es una vista lateral izquierda del manipulador de conducción de la figura 1, -la figura 3 es una vista trasera del manipulador de conducción de la figura 1, -la figura 4 es una vista del posicionamiento de una mano de un conductor en posición sentada que agarra el manipulador durante una maniobra de accionamiento o en ausencia de maniobra, -la figura 5 es una vista del posicionamiento de una mano de un conductor en posición de pie que agarra el manipulador durante una maniobra de accionamiento hacia atrás, -la figura 6 es una vista del posicionamiento de una mano de un conductor en posición de pie que agarra el manipulador durante una maniobra de accionamiento hacia delante o en ausencia de maniobra.
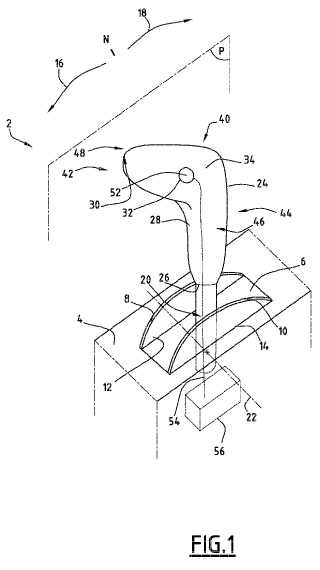
Un manipulador de conducción 2 según las figuras 1, 2 y 3 está instalado móvil con respecto a un elemento soporte 4 plano de un pupitre de conducción instalado a bordo de una cabina de pilotaje.
El manipulador de conducción 2 es capaz de ser desplazado según un movimiento de rotación en los dos sentidos de reducida amplitud contenido en un plano de carrera de extensión P definido por una corredera 6.
La corredera 6 está delimitada por dos paredes 8, 10 que forman cada una una porción de disco. Cada pared 8, 10 comprende respectivamente un tramo 12, 14 rectilíneo que forma una cuerda de la porción de disco asociada y que descansa sobre el elemento de soporte 4.
Un sentido de movimiento hacia delante, respectivamente hacia atrás, representado por la flecha 16, respectivamente la flecha 18 corresponde a un sentido de accionamiento del manipulador en tracción del vehículo, respectivamente de frenado del vehículo, definiéndose una posición neutra N intermedia y correspondiente a una ausencia de control de conducción.
El manipulador de conducción 2 comprende un brazo de palanca 20 capaz de pivotar alrededor de un eje 22 con respecto al elemento de soporte 4, y un mango 24, acoplado en un extremo 26 del brazo de palanca 20 situado del lado de las dos paredes 8, 10 de la corredera 8.
El mango 24 comprende una base 28 generalmente cilíndrica que se extiende según el eje del brazo de palanca 20 en la cual está acoplado el extremo 26. Comprende además una cabeza 30 de forma ovoide dispuesta por encima de la base e inclinada con respecto a esta, y una tecla táctil sensible al tacto 32.
El ángulo a, representado en la figura 2, formado por el plano de extensión del elemento soporte 4 y el eje mayor de la cabeza 30 de forma ovoide está comprendido entre 5 grados y 85 grados.
El mango 24 comprende una carcasa sólida 34 con cinco caras 40, 42, 44, 46, 48 entre las cuales una cara superior 40 de la cabeza 30, una cara lateral delantera 42 orientada hacia el sentido de desplazamiento hacia delante 16, una cara lateral trasera 44 orientada hacia el sentido de desplazamiento hacia atrás 18, una cara lateral izquierda 46 situada hacia la izquierda mirando hacia delante 16, una cara lateral derecha 48 situada hacia la derecha mirando hacia delante 16.
Las caras laterales izquierda y derecha 46, 48 son simétricas con respecto a un plano de simetría Q paralelo al plano de desplazamiento P y aquí confundido con este último.
Las caras 40, 42, 44, 46, 48 son unas superficies regulares unidas de manera lisa por unos redondeados.
La cara superior 40 de la cabeza es por su forma capaz de ser tocada en plano por la palma de una mano y de ser enrollada sobre su parte unida a la cara lateral delantera 42 por los dedos de la misma mano, en especial el índice, el corazón y el meñique.
La cara trasera 44 es por su forma sobre su parte de cabeza 30 unida a la cara superior 40 capaz de ser empujada hacia delante por la palma de mano.
La cara delantera 42 es capaz por su forma sobre su parte de cabeza 30 unida a la cara superior 40 de ser estirada por los dedos en especial el índice hacia atrás y capaz de ser enrollada sobre su parte base 28 por los dedos en especial el corazón y el meñique.
La tecla táctil 32 sensible al tacto está dispuesta en un agujero 50 perforado en la carcasa 34 sólida que forma la estructura portante del mango 24 y fijada de manera inamovible a la carcasa 34.
La tecla táctil 32 comprende una superficie táctil 52 fija que sobresale al nivel del borde... [Seguir leyendo]
Reivindicaciones:
1. Manipulador de conducción de un vehículo que comprende :
- un dispositivo de tratamiento (56) de hombre muerto automático por control de mantenimiento de apoyo ;
- un brazo de palanca (20) capaz de desplazarse según una dirección de accionamiento predeterminada (16, 18) ;
- un mango (24) dispuesto en un extremo (26) del brazo (20) y de forma externa adaptada a la forma de la palma de una mano ; comprendiendo el mango (24) : una base (28) generalmente tubular que se extiende según el eje del brazo (20) , una cabeza (30) , dispuesta por encima de la base (28) , de forma ovoide y de eje mayor inclinado con respecto a la base (28) , una cara superior (40) situada en la cabeza (30) y en la parte opuesta del brazo de palanca
(20) con respecto al mango (24) , al menos una cara lateral (42, 44, 46, 48) globalmente perpendicular a la cara superior (40) , y una tecla táctil (32) conectada eléctricamente al dispositivo de tratamiento (56) de hombre muerto automático por control de mantenimiento de apoyo y dispuesta al nivel de una cara lateral (46, 48) paralela al plano
(P) de accionamiento que contiene la dirección de accionamiento (16, 18) y el eje mayor de la cabeza (30) , caracterizado por el hecho de que la tecla táctil (32) está situada en la cabeza (30) de forma ovoide.
2. Manipulador de conducción según la reivindicación 1, caracterizado por el hecho de que un eje que atraviesa a la tecla táctil (32) perpendicularmente a la cara lateral (46, 48) al nivel de la cual está dispuesta corta el plano de accionamiento (P) en un punto cercano o que pertenece al eje mayor de la cabeza (30) .
3. Manipulador de conducción según cualquiera de las reivindicaciones 1 a 2, caracterizado por el hecho de que el mango (24) es simétrico con respecto a un plano de simetría (Q) que contiene la dirección de accionamiento (16, 18) y la distancia (L) de la tecla táctil (32) al plano de simetría (Q) es inferior a 25 mm.
4. Manipulador de conducción según cualquiera de las reivindicaciones 1 a 3, caracterizado por el hecho de que la tecla táctil (32) es sensible al tacto.
5. Manipulador de conducción según cualquiera de las reivindicaciones 1 a 4, caracterizado por el hecho de que comprende un elemento de soporte (4) con respecto al cual el mango es móvil y el mango (24) presenta una posición de referencia en la cual el brazo de palanca está dispuesto normal con respecto al plano del elemento de soporte (4) y por el hecho de que, en la posición de referencia, la distancia (H) de la tecla táctil (32) al elemento de soporte (6) es inferior o igual a 95 mm.
6. Manipulador de conducción según la reivindicación 5, caracterizado por el hecho de que por el plano de extensión del elemento soporte (4) y el eje mayor de la cabeza (30) está comprendido entre 5 grados y 85 grados.
7. Manipulador de conducción según cualquiera de las reivindicaciones 1 a 6, caracterizado por el hecho de que el mango (24) es hueco y la tecla táctil (32) puede ser conectada eléctricamente en el interior del mango (24) por un cable eléctrico (54) .
8. Manipulador según cualquiera de las reivindicaciones 1 a 7, caracterizado por el hecho de que el brazo de palanca (20) es hueco para suministrar un paso a un cable eléctrico conectado a la tecla táctil, siendo el paso inaccesible desde el exterior.
9. Manipulador según cualquiera de las reivindicaciones 1 a 8, caracterizado por el hecho de que el dispositivo de tratamiento (56) comprende un relé electromecánico o un elemento electrónico capaz de detectar un paso de corriente durante un apoyo sobre la tecla táctil (32) .
10. Manipulador según cualquiera de las reivindicaciones 1 a 8, caracterizado por el hecho de que el dispositivo de tratamiento (56) comprende un relé electromecánico o un elemento electrónico capaz de detectar un corte de corriente durante un apoyo sobre la tecla táctil (32) .
Patentes similares o relacionadas:
 Botón de comando para mando de juegos y mando de juegos provisto de tal botón, del 29 de Julio de 2020, de Playrapid: Botón de comando para mando de juegos, materializado en forma de una palanca de mando y determinado exactamente por dos elementos:
- […]
Botón de comando para mando de juegos y mando de juegos provisto de tal botón, del 29 de Julio de 2020, de Playrapid: Botón de comando para mando de juegos, materializado en forma de una palanca de mando y determinado exactamente por dos elementos:
- […]
PALANCA DE MANDO PARA DISPOSITIVOS DE CONTROL DE ACCIONAMIENTO MANUAL, del 14 de Febrero de 2020, de ALIAGA MORENO, Victor: 1. Palanca de mando para dispositivos de control de accionamiento manual que, aplicable para formar parte de un dispositivo de control de accionamiento manual, acoplada a […]
Elemento de mando accionable por presión y por giro para un automóvil, del 14 de Agosto de 2019, de LEOPOLD KOSTAL GMBH & CO. KG: Elemento de mando accionable por presión y por giro para un automóvil, especialmente un elemento de mando de volante, con un elemento de entrada […]
Cardán compacto de dos ejes para palanca de control, del 24 de Abril de 2019, de Woodward MPC, Inc: Una palanca de control compacta de dos ejes que comprende: un dispositivo de entrada piloto que puede pivotar alrededor de un eje de cabeceo […]
Unidad de equilibrado, del 25 de Abril de 2018, de BAE SYSTEMS PLC: Una unidad de equilibrado mediante amortiguación de las vibraciones para un aparato de dispositivo de control, contrarrestando dicha unidad […]
Sistema de control y método para controlar el movimiento de un aparato aéreo, del 27 de Diciembre de 2017, de IVECO MAGIRUS AG: Sistema de control para controlar el movimiento de un aparato aéreo, en particular para controlar una escalera giratoria de un vehículo de lucha contra incendios, que […]
Mando de control articulado, del 13 de Septiembre de 2017, de CLARK EQUIPMENT COMPANY: Un vehículo de construcción que tiene un cuerpo y un puesto de operario , que incluye un asiento apoyado en un bastidor […]
Dispositivo de control para maquinaria industrial, del 16 de Agosto de 2017, de ANGEL IGLESIAS, S.A.: Dispositivo de control para maquinaria industrial que comprende: una mini-palanca de mando que comprende un eje de accionamiento (1a), y una […]