Escalera articulada o plataforma elevable con control de trayectoria de posición y amortiguación de vibración activa.
Escalera orientable o similar, con una unidad de escalera telescópica y,
acoplado en el extremo de la unidad deescalera, un brazo articulado que porta una jaula, escalera orientable que contiene un control para mover lassecciones de escalera, estando la escalera orientable caracterizada por que, durante el desplazamiento de la jaula,se suprimen las vibraciones de las secciones de escalera, mediante la realimentación de por lo menos una de lassiguientes variables medidas, la flexión de la unidad de escalera en la dirección horizontal y vertical, el ángulo deelevación, el ángulo de rotación, la longitud de extensión y la torsión de la unidad de escalera por medio de uncontrolador a las variables de control para las unidades de accionamiento y para las cuales se proporciona uncontrol de piloto que representa el comportamiento de movimiento idealizado de la escalera durante eldesplazamiento de la jaula en un modelo dinámico, basado en ecuaciones diferenciales y calcula las variables decontrol idealizadas para las unidades de accionamiento de sección de escalera a partir del modelo dinámico para unmovimiento esencialmente libre de vibraciones de la escalera en la que se usan galgas extensométricas comosensores de medición para la flexión de la unidad de escalera en la dirección horizontal y vertical y para su torsión, yen la que los grados elásticos de libertad que pertenecen al brazo articulado se desprecian
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06119983.
Solicitante: IVECO MAGIRUS AG.
Nacionalidad solicitante: Alemania.
Dirección: NICOLAUS-OTTO-STRASSE 25-27 D-89079 ULM ALEMANIA.
Inventor/es: SAWODNY, OLIVER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66F11/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 11/00 Dispositivos de elevación adaptados especialmente a fines especiales, no previstos en otro lugar (dispositivos sobre los vehículos, que toman contacto con el suelo para soportar, elevar o maniobrar el vehículo B60S 9/00). › para plataformas o cabinas móviles, p. ej. sobre vehículos, que permiten a los obreros ocupar cualquier posición conveniente para ejecutar los trabajos requeridos (plataformas para limpiar las ventanas A47L 3/02; dispositivos para rescatar personas de los edificios de construcción A62B 1/02; bajo el aspecto vehículo en lo que se refiere a vehículos utilitarios B60P 3/14; pasarelas para el mantenimiento de puentes E01D 19/10; andamiajes sobre basamentos extensibles E04G 1/22; plataformas susceptibles de ser elevadas o bajadas, utilizables sobre escalas E06C 7/16).
- E06C5/06 CONSTRUCCIONES FIJAS. › E06 PUERTAS, VENTANAS, POSTIGOS O CORTINAS METALICAS ENROLLABLES, EN GENERAL; ESCALERAS. › E06C ESCALERAS (E04F 11/00 tiene prioridad; taburetes con peldaños A47C 12/00; adaptación de las escaleras para su utilización en los buques B63B, para utilización en aviones B64; andamiajes E04G). › E06C 5/00 Escaleras caracterizadas por el hecho de poder ser montadas sobre plataformas móviles o vehículos; Fijación de las mismas sobre vehículos (escaleras provistas de ruedas, rodillos o discos E06C 1/397). › por pistón y cilindro o por medios equivalentes que funcionan por un medio bajo presión.
- E06C5/36 E06C 5/00 […] › Dispositivos de seguridad contra el deslizamiento o la caída de las escaleras; Dispositivos de seguridad contra la sobrecarga.
- E06C5/44 E06C 5/00 […] › Otros accesorios para escaleras, p. ej. dispositivos de señalización acústica, tableros móviles de conmutación.
PDF original: ES-2427563_T3.pdf
Fragmento de la descripción:
Escalera articulada o plataforma elevable con control de trayectoria de posición y amortiguación de vibración activa
Campo de la invención [0001] La invención se refiere a una escalera orientable o similar, con una unidad de escalera telescópica y, acoplado en el extremo de la unidad de escalera, un brazo articulado que porta una jaula.
Técnica anterior
Las escaleras orientables, por ejemplo las escaleras de bomberos o dispositivos similares, tal como plataformas sobre mástil articuladas o telescópicas y dispositivos elevadores de rescate, están montadas en general sobre un vehículo de tal modo que estas pueden girarse o elevarse. En el caso especial de una escalera articulada,
se proporciona adicionalmente un brazo articulado inclinable que puede ser, además, telescópico con otro eje. El control es un control de trayectoria de posición que mantiene la jaula o plataforma en una trayectoria de posición especificada en el área de funcionamiento de la escalera orientable o plataforma elevable. De ese modo, las vibraciones y los movimientos oscilatorios de la jaula o plataforma elevadora se amortiguan de forma activa.
Cada una de las especificaciones de patente de Alemania DE 100 16 136 C2 y DE 100 16 137 C2 dan a conocer unas escaleras orientables que están provistas de un mando o control para mover las secciones de escalera. De acuerdo con el documento DE 100 16 136 C2, las vibraciones de las secciones de escalera se evitan mediante la realimentación de por lo menos una de las variables medidas: la flexión de la escalera en la dirección horizontal y vertical, el ángulo de elevación de la escalera, el ángulo de rotación, la longitud de extensión y la masa de la jaula, por medio de un controlador a las variables de control para las unidades de accionamiento. Un control de piloto reproduce el comportamiento de movimiento idealizado de la escalera en un modelo dinámico, basado en ecuaciones diferenciales, y calcula las variables de control idealizadas para las unidades de accionamiento de las secciones de escalera, con el fin de posibilitar un movimiento esencialmente libre de vibraciones de la escalera.
Tales escaleras orientables se controlan de forma hidráulica o electro-hidráulica mediante unas palancas de mano. En el caso de un control puramente hidráulico, la desviación de la palanca de mano se convierte directamente por el circuito de control hidráulico en una señal de control proporcional para el bloque de control diseñado como una válvula proporcional. Los elementos de amortiguación en el circuito de control hidráulico pueden usarse para hacer los movimientos menos trepidantes y más suaves durante la transición. No obstante, estos no pueden adaptarse de forma satisfactoria a la totalidad del intervalo de funcionamiento de las longitudes de extensión y los ángulos de elevación. Además, a menudo esto conduce a unas posiciones sumamente amortiguadas con un comportamiento de respuesta lento.
En el flujo de señales, los controles electrohidráulicos en primer lugar convierten la desviación de la palanca de mano en una señal eléctrica que se procesa adicionalmente en un dispositivo de control con un microprocesador. Por lo tanto, la señal, de acuerdo con el estado de la técnica, se amortigua mediante unas funciones rampa de tal modo que los movimientos de la escalera orientable o plataforma de trabajo son menos trepidantes y más suaves. La señal eléctrica procesada se pasa entonces a la válvula proporcional hidráulica. La pendiente de la función rampa limita el efecto de la amortiguación y es una medida del comportamiento de respuesta.
Mientras que la amortiguación de la vibración o los movimientos oscilatorios de las escaleras orientables simples convencionales, que portan la jaula en el extremo de su unidad de escalera telescópica, es posible de forma satisfactoria por medio del control que se ha descrito anteriormente, el guiado libre de vibraciones de las escaleras orientables con un brazo articulado en el extremo de una unidad de escalera telescópica, que además puede ser telescópico él mismo, da lugar a problemas significativos debido a que, en este caso, han de considerarse grados de libertad y componentes de vibración adicionales. Esto sobrepasa las capacidades de los sistemas de mando y de control conocidos, de acuerdo con el estado de la técnica, de tal modo que la totalidad del sistema de escalera puede degenerar en unos estados de funcionamiento críticos durante el despliegue, lo que puede conducir a situaciones peligrosas.
El documento EP 1 536098 A1 da a conocer una escalera orientable de acuerdo con el preámbulo de la reivindicación 1.
Sumario de la invención [0008] El objetivo de la invención es equipar una escalera orientable, que tiene un brazo articulado, con un control de trayectoria de posición que amortigua de forma activa las vibraciones.
El presente objetivo se consigue de acuerdo con la invención por medio de una escalera orientable que tiene 65 un brazo articulado y un brazo telescópico con un control de trayectoria de posición con amortiguación de vibración activa de acuerdo con la reivindicación 1.
Las realizaciones preferibles de la escalera orientable de acuerdo con la invención resultan de las reivindicaciones dependientes.
Las reivindicaciones adjuntas se consideran una parte integral de la presente descripción.
El control de trayectoria de posición con amortiguación de vibración activa se basa en el principio de describir el comportamiento dinámico de los sistemas mecánicos e hidráulicos de la escalera orientable en primer lugar como un modelo dinámico basado en ecuaciones diferenciales.
Basándose en este modelo dinámico, puede diseñarse un control de piloto que, bajo las condiciones idealizadas del modelo dinámico, no genera vibraciones de la unidad de escalera cuando se mueven los ejes de la escalera articulada y guía la jaula exactamente sobre la trayectoria de posición especificada. A diferencia de las escaleras orientables simples, a causa del brazo articulado recogido, en el caso de las escaleras articuladas tienen lugar vibraciones de torsión adicionales, que también han de amortiguarse mediante el accionamiento giratorio.
Además, ha de tenerse en cuenta el eje telescópico del brazo articulado. Estos ejes adicionales han de considerarse en el planificador de trayectoria de posición.
El prerrequisito para el control de piloto es, en primer lugar, la generación de la trayectoria de posición en el área de funcionamiento que ha de asumirse por el módulo de planificación de trayectoria de posición. El módulo de planificación de trayectoria de posición genera la trayectoria de posición que se da al control de piloto en forma de funciones del tiempo para la posición de la jaula, la velocidad y la aceleración, la sobreaceleración (jerking, tasa de variación de la aceleración) y, si es necesario, la derivada con respecto al tiempo de la sobreaceleración, a partir del requisito de entrada de la velocidad de referencia proporcional a la desviación de la palanca de mano en el caso de un funcionamiento semiautomático o de puntos objetivo en el caso de un funcionamiento completamente automático.
Debido a que, sin embargo, pueden surgir vibraciones o desviaciones con respecto a la trayectoria de posición de referencia, el sistema del control de piloto y el módulo de planificación de trayectoria de posición está soportado por un controlador de estados durante las fuertes desviaciones con respecto al modelo dinámico idealizado (por ejemplo, a través de perturbaciones) . Este realimenta por lo menos una de las variables medidas: el
ángulo de elevación, la longitud de extensión, el ángulo de rotación, el ángulo de articulación, la flexión de la escalera en la dirección horizontal y vertical o la torsión de forma respectiva.
Breve descripción de los dibujos [0016] La invención se ejemplificará posteriormente con la ayuda de los dibujos, en los que:
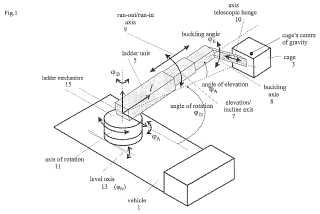
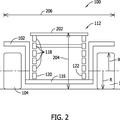
la figura 1 muestra la estructura mecánica básica de una escalera orientable a modo de ejemplo la figura 2 muestra grados rígidos y elásticos de libertad del sistema la figura 3 muestra la interacción del control hidráulico y el control de trayectoria de posición la figura 4 muestra la totalidad de la estructura del control de trayectoria de posición la figura 5 muestra el funcionamiento semiautomático y completamente automático del módulo de planificación de trayectoria de posición la figura 6 muestra el modelado como un sistema con masas equivalentes y elementos amortiguadores de resorte 45 la figura 7 muestra la estructura del controlador de eje para el eje de rotación la figura 8 muestra el controlador de eje para... [Seguir leyendo]
Reivindicaciones:
1. Escalera orientable o similar, con una unidad de escalera telescópica y, acoplado en el extremo de la unidad de escalera, un brazo articulado que porta una jaula, escalera orientable que contiene un control para mover las 5 secciones de escalera, estando la escalera orientable caracterizada por que, durante el desplazamiento de la jaula, se suprimen las vibraciones de las secciones de escalera, mediante la realimentación de por lo menos una de las siguientes variables medidas, la flexión de la unidad de escalera en la dirección horizontal y vertical, el ángulo de elevación, el ángulo de rotación, la longitud de extensión y la torsión de la unidad de escalera por medio de un controlador a las variables de control para las unidades de accionamiento y para las cuales se proporciona un 10 control de piloto que representa el comportamiento de movimiento idealizado de la escalera durante el desplazamiento de la jaula en un modelo dinámico, basado en ecuaciones diferenciales y calcula las variables de control idealizadas para las unidades de accionamiento de sección de escalera a partir del modelo dinámico para un movimiento esencialmente libre de vibraciones de la escalera en la que se usan galgas extensométricas como sensores de medición para la flexión de la unidad de escalera en la dirección horizontal y vertical y para su torsión, y
en la que los grados elásticos de libertad que pertenecen al brazo articulado se desprecian.
2. Escalera orientable de acuerdo con la reivindicación 1, caracterizada por que el brazo articulado es telescópico y por que un controlador de eje para telescopar el brazo articulado está provisto de un control en cascada con un lazo de servo externo para la posición y uno interno para la celeridad.
3. Escalera orientable de acuerdo con la reivindicación 1 o 2, caracterizada por que un módulo de planificación de trayectoria de posición se encuentra disponible para la generación de la trayectoria de posición de movimiento de escalera en el área de funcionamiento que suministra la trayectoria de posición de movimiento en forma de funciones del tiempo para la posición de la jaula, la celeridad de la jaula, la aceleración de la jaula, la sobreaceleración de la jaula y, si es necesario, la derivada de la sobreaceleración de la jaula a un bloque de control de piloto que controla las unidades de accionamiento de sección de escalera.
4. Escalera orientable de acuerdo con la reivindicación 3, caracterizada por que el módulo de planificación de trayectoria de posición permite la entrada de restricciones cinemáticas para las funciones del tiempo de la posición 30 de la jaula, la celeridad de la jaula, la aceleración de la jaula y la sobreaceleración de la jaula.
5. Escalera orientable de acuerdo con la reivindicación 4, caracterizada por que el módulo de planificación de trayectoria de posición también genera la función del tiempo para la derivada de la sobreaceleración.
6. Escalera orientable de acuerdo con la reivindicación 4 y 5, caracterizada por que el módulo de planificación de trayectoria de posición contiene unos limitadores de inclinación para tener en cuenta las restricciones cinemáticas.
7. Escalera orientable de acuerdo con la reivindicación 6, caracterizada por que el módulo de planificación de trayectoria de posición genera unas funciones de sobreaceleración continuas y a partir de estas determina, a través de integración, las funciones del tiempo para la aceleración de la jaula, la celeridad de la jaula y la posición de la jaula.
8. Escalera orientable de acuerdo con una de las reivindicaciones 1 a 7, caracterizada por que la flexión de la unidad de escalera en la dirección horizontal y vertical y su torsión puede reconstruirse a partir de las señales de 45 presión de las unidades de accionamiento hidráulico de las secciones de escalera.
9. Escalera orientable de acuerdo con una de las reivindicaciones anteriores, caracterizada por un módulo de observador de perturbación para corregir el desfase de las señales de medición de la flexión de la unidad de escalera en la dirección horizontal y vertical y la torsión y para eliminar la porción de frecuencia de las señales 50 respectivas que se corresponden con los armónicos más altos de la unidad de escalera.
10. Escalera orientable de acuerdo con una de las reivindicaciones anteriores, caracterizada por que el controlador está diseñado para ponderar los valores de medición de realimentación con una ganancia de control y para reducir la ganancia de control para eliminar los armónicos más altos de la unidad de escalera.
Patentes similares o relacionadas:
Plataforma de trabajo con protección contra funcionamiento involuntario sostenido, del 27 de Mayo de 2020, de JLG INDUSTRIES,INC.: Una plataforma de trabajo combinada y un sistema para detectar obstáculos próximos, la plataforma de trabajo incluye un panel de […]
Una plataforma aérea autopropulsada, del 13 de Mayo de 2020, de Magni Telescopic Handlers S.r.l: Una plataforma aérea autopropulsada que incluye una plataforma de trabajo proporcionada en el extremo de un brazo operativo que está soportado […]
Dispositivo de protección contra caídas, del 6 de Mayo de 2020, de IVECO MAGIRUS AG: Dispositivo de protección contra caídas , que comprende un módulo con un adaptador para unir de manera extraíble el módulo en el extremo de un aparato […]
Sistema que comprende una plataforma de trabajo giratoria, del 1 de Abril de 2020, de Scanclimber Oy: Sistema que comprende: una estructura de mástil sustancialmente vertical; una estructura de armazón que está conectada a la estructura […]
 Método y sistema para un dispositivo de elevación de baja altura, del 25 de Marzo de 2020, de Xtreme Manufacturing, LLC: Un vehículo elevador de tijera que comprende:
un carro que comprende una pluralidad de ruedas dirigibles de manera independiente configuradas para acoplarse […]
Método y sistema para un dispositivo de elevación de baja altura, del 25 de Marzo de 2020, de Xtreme Manufacturing, LLC: Un vehículo elevador de tijera que comprende:
un carro que comprende una pluralidad de ruedas dirigibles de manera independiente configuradas para acoplarse […]
Un equipo de carga para máquinas de trabajo, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un equipo de carga destinado a ser utilizado con máquinas de trabajo como manipuladores telescópicos, plataformas de trabajo aéreo o similares, […]
Sistema de detección de obstáculos para una plataforma de trabajo aérea, del 19 de Febrero de 2020, de JLG INDUSTRIES,INC.: Un conjunto de plataforma que comprende: una plataforma de trabajo que incluye un piso de la plataforma y un riel de seguridad que se extiende […]
ESTRUCTURA DOTADA DE PLATAFORMA ELEVADORA PARA MONTAJE EN EL INTERIOR DEL HUECO DEL ASCENSOR, del 12 de Febrero de 2020, de INGENIERÍA SAMAT, S.L: 1. Estructura dotada de plataforma elevadora para montaje en el interior del hueco de ascensor caracterizado por comprender; - un suelo fijo dotado de unos medios […]