Procedimiento para determinar la posición angular absoluta del volante de un vehículo automóvil.
Procedimiento para la determinación absoluta de un ángulo de giro,
en particular de la posición angular delvolante de un vehículo automóvil por medio de una unidad emisora-receptora que comprende una fuenteluminosa y una ordenación de sensores (1), que presenta una pluralidad de elementos convertidoresoptoelectrónicos, así como un portador de código dispuesto de manera giratoria con respecto a ésta quepresenta una codificación de pista única, unívoca de los valores de ángulo, reproduciéndose en laordenación de sensores (1) un segmento continuo de la codificación, y la señal de salida de la ordenaciónde sensores (1) se evalúa para la determinación de una palabra clave correspondiente al valor de ánguloactual, caracterizado porque en un filtro de correlación (3), a partir de la señal de salida (2) de laordenación de sensores (1) y una señal de referencia (4) que representa toda información angular de lacodificación, se constituye una función de correlación (6), porque para la determinación de la posición de lamejor coincidencia de la señal de salida (2) y la señal de referencia (4) se determina en un filtro de valormáximo (7) el valor máximo (8) de la función de correlación (6) y se compara en un filtro de decisión (9) conun valor umbral de correlación (10) fijado, y porque sólo cuando se supera el valor umbral de correlación(10) por el valor máximo (8) se marca la correspondiente palabra clave para el valor de ángulo como valorválido y se emite como palabra clave actual.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06014319.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WIESENSTRASSE 47 58507 LÜDENSCHEID ALEMANIA.
Inventor/es: BORGMANN, UWE, DR., KOSTER,MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
- G01D5/249 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando código de pulsos.
- G01D5/347 G01D 5/00 […] › que utilizan escalas de codificación de desplazamiento.
PDF original: ES-2415875_T3.pdf

Fragmento de la descripción:
Procedimiento para determinar la posición angular absoluta del volante de un vehículo automóvil.
La invención se refiere a un procedimiento para la determinación absoluta de un ángulo de giro, en particular de la posición angular del volante de un vehículo automóvil por medio de una unidad emisora-receptora que comprende una fuente luminosa y una ordenación de sensores, que presenta una pluralidad de elementos convertidores optoelectrónicos, así como un portador de código dispuesto de manera giratoria con respecto a ésta que presenta una codificación de pista única, unívoca de los valores de ángulo, en el que se reproduce en la ordenación de sensores un segmento continuo de la codificación, y la señal de salida de la ordenación de sensores se evalúa para determinar una palabra clave correspondiente al valor de ángulo actual.
La posición angular absoluta del volante, también designada ángulo de volante, se necesita en los vehículos automóviles para que este valor pueda ser suministrado, por ejemplo, a un sistema de regulación de la dinámica de movimiento del vehículo. Un sistema de regulación de la dinámica de movimiento del vehículo de este tipo obtiene junto al mencionado valor de ángulo de volante otros datos de medición, por ejemplo la velocidad de giro de la rueda o el giro del vehículo automóvil alrededor de su eje vertical. Por un lado se necesitan el ángulo de giro de volante absoluto y por el otro la velocidad de volante, para que estos valores puedan evaluarse junto con los otros datos adquiridos por el sistema de regulación de la dinámica de movimiento del vehículo y puedan transformarse para controlar los actuadores, por ejemplo de los frenos y/o de la gestión del motor.
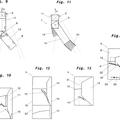
Del documento DE 40 22 837 A1 se conoce un sensor de ángulo de volante optoelectrónico adecuado para ejecutar un procedimiento de este tipo. El sensor de ángulo de volante descrito en este documento comprende una unidad de control electrónica así como una unidad de sensor, compuesta de dos elementos, paralelos y dispuestos distanciados uno de otro - una fuente luminosa y un sensor de líneas - y un disco de código dispuesto entre la fuente luminosa y el sensor de líneas, que está unido con el eje de la dirección sin posibilidad de giro. Como sensor de líneas sirve una línea de sensor CCD. La codificación prevista en este disco de código es una hendidura de luz que se extiende 360º, configurada como una espiral de Arquímedes. A través de la exposición de los correspondientes elementos convertidores del sensor de líneas en un determinado giro de volante puede captarse información sobre la posición real de ángulo de volante. La espiral de Arquímedes utilizada como codificación está configurada con un desarrollo continuo, de modo que ésta puede utilizarse como codificación analógica. No obstante, con la misma disposición también puede leerse igual de bien una codificación digital sobre el disco de código.
Del documento DE 197 58 104 A1 se conoce un procedimiento para la determinación absoluta de un ángulo de giro según el preámbulo de la reivindicación 1. En este procedimiento conocido de antemano, la señal de salida de la ordenación de sensores, mediante la evaluación de las variaciones de señal bruscas, en general también designadas flancos, se convierte en una diferencia de contraste. Las diferencias de contraste se descodifican por medio de un microcontrolador, al compararlas con un patrón en blanco y negro que representa la información angular.
Si bien este procedimiento conocido de antemano podía solucionar en principio el objetivo de determinar el valor de ángulo buscado, reacciona sin embargo de manera muy sensible a todo tipo de perturbaciones de señal. Así por ejemplo la suciedad del sistema óptico puede generar proyecciones de sombras adicionales, que se manifiestan igual como flancos en la señal de salida eléctrica y con ello causa diferencias de contraste adicionales que no corresponden a la codificación. Particularmente en la utilización en un automóvil aparecen también perturbaciones electromagnéticas que generan flancos adicionales en la señal de salida de la ordenación de sensores. Pero dado que el procedimiento de evaluación se basa justamente en el reconocimiento y evaluación de este tipo de flancos o de las diferencias de contraste derivadas de éstos, este tipo de impulsos perturbadores llevan a correspondientes mediciones erróneas. Si bien las mediciones erróneas de este tipo pueden reconocerse por medio de desarrollos correspondientemente diseñados para la verificación de la plausibilidad de los resultados de medición que resultan de ellas, no es posible sin embargo una corrección de estos resultados de medición.
El documento DE 34 24 806 A1 muestra un dispositivo de nivelación con un aparato de nivelación para leer un código de barras aplicado sobre una mira dispuesta lejos. El código de barras leído se compara por medio de un procedimiento de correlación cruzada con un código de referencia, para determinar a partir de ello la posición de lectura.
La publicación para información de solicitud de patente US 2005/0078015 A1 muestra un encoder incremental, en el que una escala que presenta una sucesión regular de marcas del mismo tamaño claras y oscuras así como una marca de índice oscura algo más gruesa se explora por una ordenación de sensores. En dos filtros de correlación que trabajan en paralelo se compara el patrón leído, por un lado con el patrón claro-oscuro regular, y por otro lado con una marca de índice posicionada en el medio de la ventana de exploración.
Partiendo de este estado de la técnica discutido, la invención se basa por tanto en el objetivo de perfeccionar un procedimiento del tipo mencionado al principio de tal forma que se consiga una insensibilidad considerablemente aumentada frente a influencias externas, en particular por suciedad o impulsos perturbadores electromagnéticos.
Este objetivo se soluciona según la invención porque en un filtro de correlación, a partir de la señal de salida de la ordenación de sensores y una señal de referencia que representa toda la información angular de la codificación, se constituye una función de correlación, porque para determinar la posición de la mejor coincidencia de la señal de salida y señal de referencia se determina en un filtro de valor máximo el valor máximo de la función de correlación y se compara en un filtro de decisión con un valor umbral de correlación fijado, y porque sólo cuando se supera el valor umbral de correlación por el valor máximo se marca la correspondiente palabra clave para el valor de ángulo como valor válido y se emite como palabra clave actual.
Dado que en el procedimiento según la invención, en contraposición con el estado de la técnica conocido de antemano, no sólo se utilizan fragmentos cortos de la señal de salida, sino que se recurre más o menos a toda la señal de salida al mismo tiempo para evaluarla, está garantizado que perturbaciones locales, como las que por ejemplo pueden generarse por partículas de suciedad, no repercuten tan fuertemente en el resultado de la evaluación.
Ventajas y diseños de la invención forman parte de las reivindicaciones dependientes así como de la descripción que sigue de un ejemplo de realización con referencia a la única figura adjunta, que muestra un diagrama de bloques del desarrollo del procedimiento.
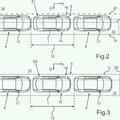
En el presente ejemplo de realización se parte de una disposición de sensor de ángulo en la que un portador de código, que presenta una pista de código que representa una codificación digital de los valores de ángulo, está colocado de manera giratoria con respecto a una unidad emisora-receptora optoelectrónica. La pista de código representa a este respecto una codificación unívoca de los valores de ángulo de desde 0 hasta 360º, y el receptor de la unidad emisora-receptora está constituido por un sensor de líneas constituido a partir de una pluralidad de fotodiodos, una denominada matriz de fotodiodos (PDA) . En el presente ejemplo se utiliza una PDA que presenta 128 fotodiodos individuales, también designados como píxeles. Esta PDA se expone a través del emisor de luz asignado a la misma, por ejemplo un diodo emisor de luz (LED) a través del portador de código que contiene la codificación. A este respecto la codificación está realizada por ejemplo por una sucesión de perforaciones que permiten el paso de la luz en el portador de código compuesto de un material opaco. En el caso de un paso de luz radial a través de esta codificación, se realiza como pista circulatoria sobre una superficie envolvente de cilindro de un portador de código correspondiente, en el caso de un paso de luz axial como una pista... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación absoluta de un ángulo de giro, en particular de la posición angular del volante de un vehículo automóvil por medio de una unidad emisora-receptora que comprende una fuente 5 luminosa y una ordenación de sensores (1) , que presenta una pluralidad de elementos convertidores optoelectrónicos, así como un portador de código dispuesto de manera giratoria con respecto a ésta que presenta una codificación de pista única, unívoca de los valores de ángulo, reproduciéndose en la ordenación de sensores (1) un segmento continuo de la codificación, y la señal de salida de la ordenación de sensores (1) se evalúa para la determinación de una palabra clave correspondiente al valor de ángulo 10 actual, caracterizado porque en un filtro de correlación (3) , a partir de la señal de salida (2) de la ordenación de sensores (1) y una señal de referencia (4) que representa toda información angular de la codificación, se constituye una función de correlación (6) , porque para la determinación de la posición de la mejor coincidencia de la señal de salida (2) y la señal de referencia (4) se determina en un filtro de valor máximo (7) el valor máximo (8) de la función de correlación (6) y se compara en un filtro de decisión (9) con un valor umbral de correlación (10) fijado, y porque sólo cuando se supera el valor umbral de correlación (10) por el valor máximo (8) se marca la correspondiente palabra clave para el valor de ángulo como valor válido y se emite como palabra clave actual.
2. Procedimiento según la reivindicación 1, caracterizado porque la constitución de la función de correlación 20 (6) se produce mediante convolución de la señal de salida (2) con la señal de referencia (4) .
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque el valor umbral de correlación (10) se fija en un valor entre cero y uno conforme a un concepto de seguridad que debe respetarse.
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]
Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]