Procedimiento de control de un aparato de dirección.
Procedimiento de control de un aparato de dirección con medios de soporte de dirección asistida (1) para unvehículo a motor con al menos una rueda (2) de rodaje dirigible y una suspensión 16,
comprendiendo el aparato dedirección:
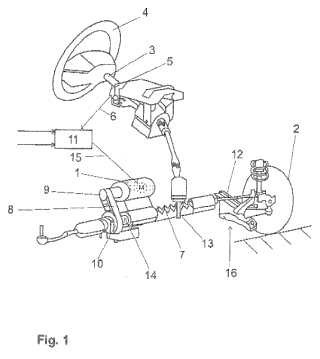
un árbol de dirección (3) con unos medios de entrada para una demanda de una dirección de conducción delvehículo, por ejemplo, un volante (4) adoptado;
unos medios de detección (5) que detectan la demanda (6), por ejemplo, el par de torsión y/o el ángulo derotación, introducida en dicho árbol de dirección (3),
una cremallera (7), en la que dicha cremallera (7) es ajustable en su dirección longitudinal en diferentesposiciones, sobre la base de la demanda introducida en el árbol de dirección, por lo que dicha al menos unarueda de rodaje (2) gira, por lo que en una primera posición (R0) de dicha cremallera, dicha rueda de rodaje (2)gira para dirigir el vehículo en una dirección de desplazamiento recto, y en el que los medios de soporte dedirección asistida (1) soportan el ajuste de la cremallera (7) mediante una transmisión por correa con una correa(8) y un primer engranaje de correa (9) y un segundo engranaje de correa (10);
un dispositivo de control (11) que controla dichos medios de soporte de dirección asistida (1),
unos medios para determinar la posición instantánea (R) de la cremallera, mediante medición directa o medianteel cálculo por parte de un observador de estado, caracterizado porque se proporcionan un dispositivo paradeterminar un valor de situación de tracción en cualquier dirección durante la conducción hacia delante en línearecta del vehículo, midiéndose o calculándose directamente el valor mediante un algoritmo apropiado y/o porparte de un observador de estado, y un dispositivo para determinar un estado de desplazamiento recto delvehículo,
comprendiendo el procedimiento las siguientes etapas:
(A) Comprobar en cada momento si hay un estado de desplazamiento recto del vehículo o no;
(B) Si se alcanza el estado de desplazamiento recto del vehículo, determinar la posición instantánea (R) de lacremallera y calcular un nuevo desplazamiento, siendo este la diferencia entre la posición instantánea (R) dela cremallera y la primera posición (R0) de dicha cremallera (7);
(C) Comprobar en una primera operación de justificación si el nuevo desplazamiento de la posición de lacremallera en el estado de desplazamiento recto del vehículo, respecto a la primera posición de la cremallera,difiere de un desplazamiento previo, que fue determinado como el nuevo desplazamiento en un momentoanterior o, y establecer, en este caso, el primer resultado de justificación como verdadero, y de lo contrariocomo falso;
(D) Comprobar en una segunda operación de justificación si el valor de situación de tracción excede de unvalor límite, y en este caso, establecer el segundo resultado de justificación como verdadero, y de lo contrariocomo falso;
(E) Si los primer y segundo resultados de justificación son verdaderos, establecer un estado del dispositivo desuspensión en un estado de "suspensión dañada";
(F) Si el primer resultado de justificación es verdadero y el segundo resultado de justificación es falso,establecer un estado de salto de la correa en un estado de "correa saltada".
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10004434.
Solicitante: THYSSENKRUPP PRESTA AG.
Nacionalidad solicitante: Liechtensein.
Dirección: 9492 Eschen LIECHTENSTEIN.
Inventor/es: SOÓS,ISTVÁN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
PDF original: ES-2444767_T3.pdf
Fragmento de la descripción:
Procedimiento de control de un aparato de dirección La presente invención se refiere a un procedimiento de control de un aparato de dirección con las características del preámbulo de la reivindicación 1.
La técnica anterior más próxima se divulga en la solicitud de patente alemana DE 10 2008 021 849 A1. Este documento muestra un dispositivo de dirección para un vehículo de carretera que es servoasistido mediante un motor eléctrico que acciona una cremallera de dirección a través de una transmisión por correa. El dispositivo comprende una serie de sensores, a saber, un sensor del ángulo de dirección que está asociado con el volante y un sensor de posición del motor que detecta la posición del rotor del motor eléctrico. El sistema comprueba continuamente la relación entre la posición del motor y el ángulo de dirección. Entre otras características, se proporciona una detección del salto de la correa, que detecta un desplazamiento repentino en la correlación entre el ángulo de dirección y la posición del motor. Tal desplazamiento puede producirse en el caso de los sistemas de dirección electromecánicos accionados por correa si la correa es una correa dentada y, debido a una situación de sobrecarga, la correa se desliza sobre el engranaje de la correa y salta de uno al otro. El sistema de la técnica anterior en este caso asumirá que la correa se ha dañado y la dirección opera en un modo que impide un mayor daño a la correa, es decir, mediante la reducción de la servoasistencia.
Aunque los sistemas de dirección de la técnica anterior proporcionan al conductor información que la correa puede estar dañada y tiene que comprobarse, no hay información sobre si se han dañado o no los componentes mecánicos del enlace de dirección (tirantes, etc.) y la suspensión.
Por lo tanto, un objeto de la presente invención es proporcionar un procedimiento de control de un sistema de dirección electromecánico que comprende una detección adicional de posibles daños al sistema de dirección y a la suspensión.
Este objeto se consigue mediante un procedimiento con las características de la reivindicación 1.
En el sistema, que comprende medios de soporte de dirección asistida para un vehículo de motor con al menos una rueda de rodaje orientable y una suspensión, que comprende además:
un árbol de dirección con una entrada para demandar una dirección de conducción del vehículo, por ejemplo, un volante adoptado, medios de detección que detectan la demanda, por ejemplo, el par de torsión y/o el ángulo de rotación, introducida en dicho árbol de dirección, una cremallera, en la que dicha cremallera es ajustable en su dirección longitudinal en diferentes posiciones, sobre la base de la demanda introducida en el árbol de dirección, por lo que dicha al menos una rueda de rodaje gira, por lo que en una primera posición R0 de dicha cremallera, dicha rueda de rodaje gira para dirigir el vehículo en una dirección de desplazamiento recto, en el que los medios de soporte de dirección asistida soportan el ajuste de la cremallera mediante una transmisión por correa con un correa y engranajes de correa, y un dispositivo de control para controlar dichos medios de soporte de dirección asistida, medios para determinar dicha posición instantánea R de la cremallera, que fue directamente medida o calculada por parte de un observador de estado, proporcionándose además las siguientes funciones: un dispositivo para determinar un valor de situación de tracción del dispositivo de dirección, directamente medido o calculado mediante un algoritmo apropiado y/o un observador de estado, y un dispositivo para determinar un estado de desplazamiento recto del vehículo.
En este sistema, se realizan las siguientes etapas para determinar una situación de salto de la correa y un daño de la suspensión, y especialmente para distinguir entre estas dos situaciones:
(A) Comprobar de manera continua o casi continua si existe o no un estado de desplazamiento recto del vehículo;
(B) Si se alcanza el estado de desplazamiento recto del vehículo, determinar la posición instantánea de la cremallera (R) y calcular un nuevo desplazamiento en cuanto a la diferencia entre la posición instantánea de la cremallera (R) y la primera posición (R0) de dicha cremallera;
(C) Comprobar en una primera operación de justificación, si el nuevo desplazamiento de la posición de la cremallera en el estado de desplazamiento recto del vehículo respecto a la primera posición de la cremallera difiere de un desplazamiento previo, que se determinó previamente como nuevo desplazamiento, y en este caso establecer el primer resultado de justificación como verdadero, y en caso contrario como falso;
(D) Comprobar en una segunda operación de justificación, si el valor de situación de tracción excede un valor límite y, en caso afirmativo, ajustar el segundo resultado de justificación como verdadero, y en caso contrario como falso;
(E) Si el primer y segundo resultados de justificación son verdaderos, establecer un estado del dispositivo de suspensión como un estado dañado,
(F) Si el primer resultado de justificación es verdadero y el segundo resultado de justificación es falso, establecer un estado de salto de la correa como a un estado de salto de la correa.
El estado dañado y el estado de "correa saltada" pueden gestionarse como señales en el programa de control del dispositivo.
Este procedimiento permite que el sistema de dirección no sólo compruebe la correlación entre el ángulo del volante y la posición del motor, sino también entre el ángulo del volante y la dirección de conducción del vehículo. De esta manera, se puede detectar un desplazamiento entre la dirección del vehículo, especialmente en una conducción recta hacia delante, y el ángulo del volante y buscando además una tracción en cualquier dirección durante la conducción recta hacia delante se puede distinguir entre un "salto de la correa" y un "daño en la suspensión".
En una realización preferida, el dispositivo para determinar cualquier situación de tracción comprende un dispositivo para determinar la carga instantánea de la cremallera (FR) en su dirección longitudinal, que se introduce mediante dicha rueda de rodaje orientable y en el que la carga instantánea de la cremallera (FR) se utiliza como el valor de estado de tracción. Por lo tanto, es posible una determinación directa de la fuerza relevante.
Se prefiere además que los medios de soporte de dirección asistida sean un motor eléctrico con un rotor y que los medios para determinar dicha posición instantánea (R) de la cremallera utilicen un sensor para detectar la posición angular del rotor de los medios de soporte de dirección asistida. Este sensor produce una señal representativa de la posición del motor y de la posición del engranaje de dirección con una muy buena resolución.
En una realización preferida, se prevé que el resultado de la determinación del desplazamiento se utilice para corregir el desplazamiento para una operación adicional del sistema de dirección, en caso de que la correa haya saltado. Por otra parte, si el estado de "correa saltada" es verdadero, una nueva posición del motor está asociada con la condición de conducción recta hacia adelante como una nueva posición central. Estas características permiten que el dispositivo funcione con normalidad después de haberse producido un salto de la correa. En principio, el salto de la correa no daña ninguno de los componentes, de manera que puede realizarse el funcionamiento normal con los nuevos parámetros. Sin embargo, la propia correa podría dañarse. En este caso, se prefiere que se genere un mensaje de advertencia y se envíe al conductor si el estado de "correa saltada" es verdadero. Tal mensaje de advertencia puede ser la instrucción al conductor de que debe comprobar el sistema de dirección tan pronto como sea posible.
En otra realización, el daño de la suspensión, que puede haber sido detectado, puede considerarse en el programa de control del dispositivo de dirección y/o en un programa de control para el vehículo. Estos programas de control pueden funcionar de una manera modificada para minimizar la carga en la suspensión, por ejemplo mediante la limitación de la velocidad del vehículo o mediante la reducción de la fuerza de servoasistencia. De esta manera, en ciertos casos se puede evitar una suspensión dañada previamente falle.
También se prefiere que se genere un mensaje de advertencia y se envíe si el estado de "daños en la suspensión" es verdadero. Este mensaje de advertencia puede incluir la instrucción de detener el vehículo inmediatamente o tener que comprobar la suspensión... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de control de un aparato de dirección con medios de soporte de dirección asistida (1) para un vehículo a motor con al menos una rueda (2) de rodaje dirigible y una suspensión 16, comprendiendo el aparato de dirección:
un árbol de dirección (3) con unos medios de entrada para una demanda de una dirección de conducción del vehículo, por ejemplo, un volante (4) adoptado; unos medios de detección (5) que detectan la demanda (6) , por ejemplo, el par de torsión y/o el ángulo de rotación, introducida en dicho árbol de dirección (3) , una cremallera (7) , en la que dicha cremallera (7) es ajustable en su dirección longitudinal en diferentes posiciones, sobre la base de la demanda introducida en el árbol de dirección, por lo que dicha al menos una rueda de rodaje (2) gira, por lo que en una primera posición (R0) de dicha cremallera, dicha rueda de rodaje (2) gira para dirigir el vehículo en una dirección de desplazamiento recto, y en el que los medios de soporte de dirección asistida (1) soportan el ajuste de la cremallera (7) mediante una transmisión por correa con una correa (8) y un primer engranaje de correa (9) y un segundo engranaje de correa (10) ; un dispositivo de control (11) que controla dichos medios de soporte de dirección asistida (1) , unos medios para determinar la posición instantánea (R) de la cremallera, mediante medición directa o mediante el cálculo por parte de un observador de estado, caracterizado porque se proporcionan un dispositivo para determinar un valor de situación de tracción en cualquier dirección durante la conducción hacia delante en línea recta del vehículo, midiéndose o calculándose directamente el valor mediante un algoritmo apropiado y/o por parte de un observador de estado, y un dispositivo para determinar un estado de desplazamiento recto del vehículo, comprendiendo el procedimiento las siguientes etapas:
(A) Comprobar en cada momento si hay un estado de desplazamiento recto del vehículo o no;
(B) Si se alcanza el estado de desplazamiento recto del vehículo, determinar la posición instantánea (R) de la cremallera y calcular un nuevo desplazamiento, siendo este la diferencia entre la posición instantánea (R) de la cremallera y la primera posición (R0) de dicha cremallera (7) ;
(C) Comprobar en una primera operación de justificación si el nuevo desplazamiento de la posición de la cremallera en el estado de desplazamiento recto del vehículo, respecto a la primera posición de la cremallera, difiere de un desplazamiento previo, que fue determinado como el nuevo desplazamiento en un momento anterior o, y establecer, en este caso, el primer resultado de justificación como verdadero, y de lo contrario como falso;
(D) Comprobar en una segunda operación de justificación si el valor de situación de tracción excede de un valor límite, y en este caso, establecer el segundo resultado de justificación como verdadero, y de lo contrario como falso;
(E) Si los primer y segundo resultados de justificación son verdaderos, establecer un estado del dispositivo de suspensión en un estado de "suspensión dañada";
(F) Si el primer resultado de justificación es verdadero y el segundo resultado de justificación es falso, establecer un estado de salto de la correa en un estado de "correa saltada".
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el dispositivo para determinar cualquier situación de tracción comprende un dispositivo para determinar la carga instantánea (FR) de la cremallera en su dirección longitudinal, que se introduce mediante dicha rueda de rodaje orientable (4) y en el que la carga instantánea de la cremallera (FR) se utiliza como el valor del estado de tracción.
3. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque los medios de soporte de dirección asistida son un motor eléctrico con un rotor, y porque los medios para determinar dicha posición instantánea (R) de la cremallera utilizan un sensor para detectar la posición angular del rotor de los medios de soporte de dirección asistida (1) .
4. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque si el estado de "correa saltada" es verdadero, el resultado de la determinación del desplazamiento se utiliza para corregir el desplazamiento para la operación adicional del dispositivo.
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque si el estado de "correa saltada" es verdadero, una nueva posición del motor se asocia a la condición de conducción hacia adelante en línea recta como la posición central.
6. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el daño de la suspensión puede considerarse en el programa de control del dispositivo de dirección y/o en un programa de control para el vehículo.
7. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se genera un mensaje de advertencia y se emite si el estado de "correa saltada" es verdadero.
8. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se genera un
mensaje de advertencia y se emite si el estado de "daño en la suspensión" es verdadero.
9. Procedimiento de acuerdo con una de las reivindicaciones anteriores 7 y 8, caracterizado porque los mensajes de advertencia se almacenan en una memoria para una posterior evaluación del problema subyacente.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]