Contador de objetos y método para contar objetos.
Método para contar objetos que pasan por una determinada demarcación (16) de conteo,
comprendiendo elmétodo:
capturar imágenes que representan imágenes en movimiento de una vista (12) de conteo predeterminada,detectar repetidamente una región (102) de movimiento que se mueve en las imágenes en movimiento de la vista(12) de conteo predeterminada,
calcular repetidamente un valor (va) de la velocidad de la región (102) de movimiento, que indica la velocidad delmovimiento de la región (102) de movimiento,
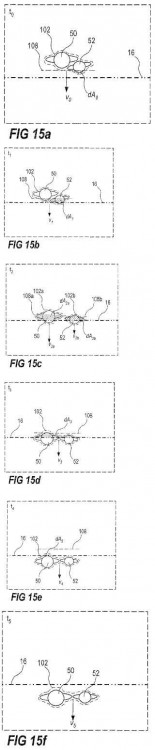
definir repetidamente una demarcación de una zona de contribución (108, 110) basada en la demarcación (16) deconteo predeterminada, en el valor (va) de la velocidad de la región de movimiento y en un periodo (dt) de tiempo decontribución,
recuperar repetidamente y registrar el valor (dA) de la sub-área que representa el tamaño del área de la región(102) de movimiento contenida en la zona de contribución definida,
generar un valor (Atot) del área total sumando una pluralidad de valores (dA) de sub-áreas registrados, yestimar el número de objetos que han pasado por la demarcación (16) de conteo, dividiendo el valor (Atot) del áreatotal entre un valor (Ano) del área del objeto de referencia,
donde dicho periodo (dt) de tiempo de contribución se corresponde con el periodo de tiempo entre dos actosconsecutivos de recuperación del valor (dA) de la sub-área
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10191650.
Solicitante: AXIS AB.
Nacionalidad solicitante: Suecia.
Dirección: EMDALAVÄGEN 14 223 69 LUND SUECIA.
Inventor/es: ALMBLADH,JOHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T7/20 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
PDF original: ES-2396500_T3.pdf
Fragmento de la descripción:
Contador de objetos y método para contar objetos Campo técnico de la invención La presente invención está relacionada con un contador de objetos y un método para contar objetos que pasan por 5 una demarcación predeterminada. Más en particular, está relacionada con contar tales objetos por medio del análisis de imágenes capturadas utilizando una cámara.
Antecedentes de la invención Los contadores de objetos basados en un sensor y un analizador que coopera para determinar el número de objetos que pasan por una demarcación, son ampliamente utilizados en distintas aplicaciones.
Un contador de objetos es un dispositivo que se utiliza para contar objetos, como por ejemplo la gente que entra o abandona unos grandes almacenes, una estación de tren o cualquier otra zona de interés, el ganado que sale o entra en una zona, productos que pasan por una cinta transportadora, o productos que pasan por una rampa transportadora, etc. El contador objeto puede ser utilizado por ejemplo para fines de seguridad, pero también para generar estadísticas de objetos que entran o salen de una zona.
Un contador de objetos comprende en términos generales una parte de detección y una parte de análisis. La parte de detección está basada comúnmente en un sensor que detecta alguna característica relacionada con los objetos, por ejemplo un sensor de imágenes que detecta la parte visible del espectro de luz para detectar características visibles de los objetos, una Matriz de Plano Focal, como por ejemplo un sensor microbolométrico que detecta en la parte infrarroja del espectro de la luz para registrar el perfil térmico de objetos o un sistema sensor de tiempo de vuelo que crea una imagen de la distancia a los objetos en la vista de una imagen.
En el caso de que la parte de detección sea un sensor que registre las características de los objetos de una serie, por ejemplo, que registre datos que puedan ser interpretados y analizados por medio de herramientas de análisis de imágenes, la parte analizadora estará entonces generalmente adaptada para analizar imágenes. En la mayoría de contadores de objetos, el análisis de imágenes se basa en algoritmos de detección de objetos, por ejemplo en aquellos en que se detectan objetos individuales, se identifican y se les hace un seguimiento por toda la zona cubierta por el sensor, y después se cuentan cuando pasan por una demarcación predeterminada. Una persona experta en la técnica conocerá varios tipos de algoritmos de detección de objetos.
Un problema de los actuales algoritmos de detección de objetos es que los objetos que están muy juntos, tienen características similares, y/o tienen aproximadamente la misma velocidad, son muy difíciles de detectar como 30 objetos independientes. Las situaciones en las que estos problemas son evidentes son, por ejemplo, cuando se cuentan objetos que se entregan desorganizadamente en una cinta transportadora, ya que los objetos pueden disponerse muy juntos o uno encima del otro en agrupaciones de distintos tamaños, o cuando se cuenta la gente que entra o sale de tiendas o almacenes de comestibles, ya que la gente entra a menudo en grupos, es decir, entra en grupos de dos o más que caminan juntos, y en otras situaciones similares. Un grupo de objetos debe ser
entendido como un grupo de objetos agrupados muy juntos. El problema ocurre debido a que el grupo de objetos puede ser detectado como un solo objeto. Muchos contadores de objetos confían simplemente en contar los objetos detectados, que darán como resultado una estimación por debajo del número de objetos si los objetos llegan en grupos o si cada grupo se cuenta como un objeto.
En algunas soluciones de la técnica anterior, la forma del objeto detectado se analiza con el fin de estimar un conteo más preciso del número de objetos comprendidos en un objeto detectado. Sin embargo, tal análisis de formas de los objetos detectados requiere mucha potencia de proceso, limitando por tanto el uso del método a dispositivos que tienen mucha potencia de proceso libre. Tal potencia de proceso puede no estar disponible en sistemas o dispositivos incorporados que tengan un pequeño factor de forma.
En el documento WO 2009/016614, se describe un proceso para contar y medir. El proceso incluye la captura de 45 una imagen de fondo que no incluye ningún objeto a contar. Después se toma una imagen cuando se colocan los objetos frente a la cámara. Las zonas que difieren de la imagen de fondo son interpretadas como objetos, y el número de objetos puede ser calculado multiplicando el área de los objetos interpretados por un factor o utilizando una tabla de consulta que incluya valores que relacionen un área con un valor que indique el número de objetos. Este método es simple y eficaz cuando se trata de contar objetos estacionarios. Sin embargo, cuando hay que 50 contar objetos móviles que pasan por una demarcación, este método no es fiable.
El documento EP 0 700 017 divulga un método y un dispositivo para contar en una dirección los objetos móviles.
Sumario de la invención Un objeto de la presente invención es proporcionar un contador de objetos mejorado.
El objeto se consigue por medio de un método de acuerdo con la reivindicación 1, y un contador de objetos de acuerdo con la reivindicación 10. Otros modos de realización de la invención se presentan en las reivindicaciones dependientes.
Este método es ventajoso porque facilita el conteo de objetos móviles en un entorno de proceso que tiene una capacidad limitada, por ejemplo, capacidad de proceso, capacidad de almacenamiento, etc. Una razón para esta ventaja resulta del hecho de que el método opera sobre flujos de área, es decir, sub-áreas dentro de una región de movimiento, y por tanto no necesita procesar operaciones intensivas tales como el seguimiento de objetos.
En un modo de realización, el método se realiza en una cámara que está habilitada para capturar imágenes móviles. Por ello, puede reducirse el requisito de ancho de banda del sistema, porque no se requiere enviar imágenes por la red para la funcionalidad de contar personas.
En otro modo de realización, se define una zona de contribución repetidamente, siempre que se detecte un objeto en las imágenes móviles.
De acuerdo con otro modo más de realización, el acto de estimar un conteo de objetos que han pasado por una demarcación de conteo, se realiza cuando no hay presentes regiones de movimiento en su respectiva zona de contribución. Al realizar la estimación cuando no hay presentes objetos en su correspondiente zona de contribución, no es necesario el proceso relativo a objetos que estén presentes en sus correspondientes zonas de contribución. Por tanto, el sistema puede operar utilizando menos capacidad de proceso que si ambas operaciones tuvieran que realizarse simultáneamente.
De acuerdo con otro modo de realización, el método comprende además el paso de sumar el conteo estimado a una variable que representa el conteo total.
En un modo de realización, la detección de una región de movimiento comprende además detectar una pluralidad de regiones de movimiento simultáneamente presentes en la vista del conteo. Al detectar una pluralidad de regiones de movimiento, puede aumentar la precisión de las sub-áreas, porque pueden considerarse las características individuales, por ejemplo la velocidad, de cada región de movimiento, cuando se registran sub-áreas de regiones de movimiento diferentes. Además, el cálculo de los valores de velocidad puede incluir el cálculo de valores de velocidad individuales para las regiones de movimiento detectadas, respectivamente, y haciendo posible por tanto la definición de zonas de contribución independientes para cada una de las regiones de movimiento. Por eso, puede aumentarse aún más la precisión de las sub-áreas.
En otro modo más de realización, el acto de definir una zona de contribución se realiza entre dos actos consecutivos de recuperación y registro de un valor de sub-área que representa el tamaño del área de la región de movimiento contenida en la zona de contribución definida.
En otro modo de realización, el acto de definir una zona de contribución se repite antes de cada acto de recuperación y registro del valor de la sub-área.
El contador de objetos es ventajoso en cuanto que facilita el conteo de objetos móviles en un entorno de proceso con capacidad limitada, por ejemplo, la capacidad de proceso, la capacidad de almacenamiento, etc. Una razón para esta ventaja resulta del hecho de que el contador de objetos incluye un calculador de zonas de contribución y un calculador de áreas que hace que el contador de objetos opere con flujos de área, es decir, sub-áreas dentro de una región... [Seguir leyendo]
Reivindicaciones:
1. Método para contar objetos que pasan por una determinada demarcación (16) de conteo, comprendiendo el método:
capturar imágenes que representan imágenes en movimiento de una vista (12) de conteo predeterminada,
detectar repetidamente una región (102) de movimiento que se mueve en las imágenes en movimiento de la vista (12) de conteo predeterminada,
calcular repetidamente un valor (va) de la velocidad de la región (102) de movimiento, que indica la velocidad del movimiento de la región (102) de movimiento,
definir repetidamente una demarcación de una zona de contribución (108, 110) basada en la demarcación (16) de conteo predeterminada, en el valor (va) de la velocidad de la región de movimiento y en un periodo (dt) de tiempo de contribución,
recuperar repetidamente y registrar el valor (dA) de la sub-área que representa el tamaño del área de la región (102) de movimiento contenida en la zona de contribución definida,
generar un valor (Atot) del área total sumando una pluralidad de valores (dA) de sub-áreas registrados, y
estimar el número de objetos que han pasado por la demarcación (16) de conteo, dividiendo el valor (Atot) del área total entre un valor (Ano) del área del objeto de referencia,
donde dicho periodo (dt) de tiempo de contribución se corresponde con el periodo de tiempo entre dos actos consecutivos de recuperación del valor (dA) de la sub-área.
2. Método según la reivindicación 1, en el que dicho método se realiza en una cámara (10) habilitada para capturar imágenes móviles.
3. Método según cualquiera de las reivindicaciones 1 - 2, en el que el acto de definir una zona de contribución se realiza repetidamente siempre que se detecte la región (102) de movimiento en las imágenes móviles.
4. Método según cualquiera de las reivindicaciones 1 - 5, en el que el acto de estimar un conteo de objetos que han pasado por la demarcación (16) de conteo, se realiza cuando no hay presentes regiones (102) de movimiento en su respectiva zona de contribución.
5. Método según la reivindicación 4, que comprende además el paso de sumar el conteo estimado con una variable que representa el conteo total.
6. Método según cualquiera de las reivindicaciones 1 - 5, en el que la detección de una región (102) de movimiento comprende además detectar una pluralidad de regiones (102) de movimiento que están simultáneamente presentes en la vista (12) de conteo.
7. Método según la reivindicación 6, en el que el cálculo de valores (va) de velocidad incluye el cálculo de valores individuales (va) de velocidad para las regiones (102) de movimiento detectadas, respectivamente.
8. Método según cualquiera de las reivindicaciones 1 - 7, en el que el acto de definir una zona de contribución se realiza entre dos actos consecutivos de recuperación y registro de un valor (dA) de sub-área que representa el tamaño del área de la región (102) de movimiento contenida en la zona de contribución definida.
9. Método según la reivindicación 8, en el que el acto de definir una zona de contribución se repite antes de cada acto de recuperación de un valor (dA) de sub-área.
10. Contador de objetos para contar objetos que pasan por una demarcación (16) de conteo especificada, comprendiendo dicho contador de objetos:
un sensor (602) de imágenes configurado para capturar imágenes de una vista (12) de conteo predeterminada, y
un detector (620) de regiones de movimiento, configurado para detectar repetidamente regiones (102) de movimiento que se desplazan en las imágenes capturadas y para calcular repetidamente un valor (va) de velocidad que indica la velocidad de un movimiento de la región (102) de movimiento,
caracterizada por:
un calculador (622) de zonas de contribución configurado para definir repetidamente una demarcación de una zona (108, 110) de contribución, basándose en la demarcación (16) de conteo predeterminada, en el valor (va) de la velocidad y en un periodo (dt) de tiempo de contribución,
un calculador (624) del área configurado para recuperar y registrar un valor (dA) de sub-área que representa el tamaño del área de la región (102) de movimiento contenida en la zona de contribución definida,
un acumulador (626) del área configurado para acumular un valor (Atot) del área total sumando una pluralidad de valores (dA) de sub-área registrados, y
una unidad (618) de conteo de objetos configurada para calcular el número de objetos que han pasado por la demarcación (16) de conteo, mediante la división del valor (Atot) del área total entre un valor (Ano) del área del objeto de referencia.
11. Contador de objetos de acuerdo con la reivindicación 10, en el que el contador de objetos está dispuesto en una cámara (10) .
12. Contador de objetos según cualquiera de las reivindicaciones 10 u 11, en el que el detector (620) de regiones de movimiento está configurado además para detectar una pluralidad de regiones (102) de movimiento que están simultáneamente presentes en la vista (12) de conteo.
Patentes similares o relacionadas:
Desplazamiento de inhibición de un dispositivo recargable inalámbricamente, del 26 de Febrero de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para inhibir el desplazamiento de un dispositivo recargable inalámbricamente posicionado en una superficie de carga subyacente […]
Sistemas y métodos de seguimiento de objetos asociativos, del 8 de Enero de 2020, de Isolynx, LLC: Un aparato de seguimiento asociativo para seguir un primer objeto (402 , 1206) usando información de seguimiento para el primer objeto (402 , 1206) e información […]
Procedimiento de estimación de flujo óptico a partir de un sensor de luz asíncrono, del 18 de Diciembre de 2019, de Sorbonne Université: Procedimiento de estimación de flujo óptico, que comprende: - recibir información asíncrona proveniente de un sensor de luz que tiene una matriz de píxeles dispuestos […]
Metrología en vivo de un objeto durante la fabricación u otras operaciones, del 21 de Agosto de 2019, de THE BOEING COMPANY: Un método para metrología en vivo de un objeto, que comprende: realizar una operación de escaneado mediante una pluralidad de sensores para […]
Procedimiento y dispositivo para la detección de objetos en movimiento en una secuencia de imágenes de vídeo, del 19 de Junio de 2019, de Airbus Defence and Space GmbH: Procedimiento para la detección de objetos en movimiento en una secuencia de imágenes de vídeo que comprende los pasos de: a) determinación de […]
Método y sistema para generar una representación 3D en una escena 3D dinámicamente cambiante, del 13 de Mayo de 2019, de VIZRT AG: Método para llenar los huecos que quedan en el fondo de una imagen después de recortar los objetos del fondo, que comprende las etapas […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Método implementado por ordenador y sistema para procesamiento de video con consistencia en el tiempo, del 15 de Abril de 2019, de RATIONAL PIXELS S.L: Un metodo implementado por ordenador para editar una secuencia de video con consistencia en el tiempo que comprende las etapas de: i) calcular un campo de movimiento […]