UN MÉTODO PARA COMPENSAR FALTAS DE ALINEACIÓN DE HARDWARE EN UNA CÁMARA.
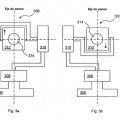
Un método para compensar desalineaciones de hardware en una cámara (100,
200, 300, 400, 500, 600, 700, 800, 1200, 1304) que comprende una parte maniobrable (302, 402, 502, 1202) y una parte fija (304, 404, 504, 1206), estando dicho parte maniobrable controlada por un sistema de motor de direccionamiento (1208) y en el que dicha parte maniobrable comprende un bloque de cámara (312), que comprende: recibir (1100) coordenadas mecánicas desde dicho sistema de motor de direccionamiento (1208), donde dichas coordenadas mecánicas corresponden a una posición de paneo-inclinación, teniendo dicha posición de paneo- inclinación una posición de paneo-inclinación complementaria, siendo la posición de paneo-inclinación complementaria una posición a la que se llega mediante el sistema de motor de direccionamiento (1208) que hace rotar la parte maniobrable en 180 grados alrededor de un eje de paneo y mediante el sistema de motor de direccionamiento (1208) que hace rotar el bloque de cámara en un ángulo correspondiente a -2TU-180 grados alrededor de un eje de inclinación, hallándose TU en el intervalo de 0 a -90 grados, y siendo TU la coordenada de inclinación de las coordenadas mecánicas; leer (1102) datos de calibración predeterminados correspondientes a dichas coordenadas mecánicas recibidas tomados de una memoria (1210) comprendida en dicha cámara (100, 200, 300, 400, 500, 600, 700, 800, 1200, 1304), comprendiendo dichos datos de calibración predeterminados un componente de compensación horizontal y un componente de compensación vertical, representando dichos componentes de compensación la diferencia entre las coordenadas mecánicas de la posición de paneo-inclinación y las coordenadas mecánicas de una posición intermedia, que se halla entre la posición de paneo-inclinación y la posición de paneo-inclinación complementaria; y determinar (1104) coordenadas compensadas en base a dichas coordenadas mecánicas recibidas y de dichos datos de calibración predeterminados
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07102655.
Solicitante: AXIS AB.
Nacionalidad solicitante: Suecia.
Dirección: EMDALAVÄGEN 14 223 69 LUND SUECIA.
Inventor/es: NILSSON, MARTIN.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Febrero de 2007.
Clasificación Internacional de Patentes:
- H04N17/00C
- H04N7/18D2
Clasificación PCT:
- H04N17/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › Diagnóstico, prueba o medida, o sus detalles, para los sistemas de televisión.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359349_T3.pdf
Fragmento de la descripción:
Campo técnico
En términos generales, la presente invención se refiere a un método para compensar faltas de alineación de hardware en una cámara, a una cámara y a un sistema que comprende un aparato de interfaz con usuario.
Antecedentes de la invención
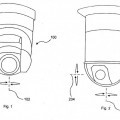
En la actualidad, las cámaras PTC (Pan Tilt Zoom, Paneo Inclinación Zoom) y las cámaras de tipo cúpula son de uso muy difundido. La principal razón de esto es que el operador puede maniobrar estas cámaras a distancia. Por ejemplo, si el operador descubre un posible objetivo puede dirigir o apuntar la cámara hacia dicho objetivo mediante un sistema de motor de direccionamiento incluido en la cámara. Además, en algunas cámaras, también es posible utilizar el zoom para acercarse o alejarse a efectos de lograr un campo de visión deseado.
A efectos de lograr una cámara con una buena función de control, es de gran importancia un sistema de control de direccionamiento de elevada calidad. En primer lugar, la cantidad de pasos es importante, ya que una gran cantidad de pasos hace que sea posible un control preciso de la cámara. En segundo lugar, es importante que la cámara esté diseñada y montada correctamente, ya que un montaje incorrecto de la cámara influirá desfavorablemente sobre el control de la cámara.
Además, si dentro de la cámara se dispone de una función de zoom, es importante que los lentes en el sistema de lentes de la cámara estén montados y dirigidos (orientados) adecuadamente. En caso contrario, se presentará un error de desplazamiento cuando se utilice la función de zoom.
Por ello existe una necesidad de hacer frente a imperfecciones en la operación dirección de la cámara.
La patente de los EE. UU. de América N.º 2002/003965 se refiere a sistemas de lentes de cámara que tienen características ópticas (tales como zoom y enfoque) que pueden modificarse mientras la cámara esta el uso; el sistema de lentes es para su montaje sobre una cámara que tiene sus propios sensores para entregar señales representativas de la posición angular de la cámara con respecto al lugar en que está emplazado la cámara (stand). El documento 2002/0033965 se refiere a un sistema para calibrar un lente de cámara, el cual proceso de calibración implica dos etapas. Una primera etapa se refiere a la determinación de las características intrínsecas del sistema de lentes y a generar un archivo de computadora que contenga estas características. La primera etapa se efectúa de una vez para siempre. La segunda etapa se lleva a cabo cada vez que la cámara esté en uso, e implica definir funciones de transferencia entre las señales procedentes de los sensores que detectan la orientación de la cámara y los sensores que detectan el ajuste del sistema de lentes y las características reales, sobre la base del archivo y sobre la base de las señales obtenidas cuando se toman puntos característicos que forman parte de la escena que debe visualizarse.
El documento titulado “A High–precision Camera Operation Parameter Measurement System and its Application to Image Motion Inferring”, de Zheng et al. se refiere a un método para calibrar los parámetros operativos de una cámara. Dicho con mayor detalle, el documento de Zheng y otros se refiere a un sistema de alta precisión para la medición de parámetros operativos de una cámara, el cual sistema está diseñado para proveer parámetros operativos de la cámara con una elevada precisión en vista a aplicaciones de codificación de imágenes. Hay unos sensores de paneo /inclinación (pan/ tilt) instalados sobre una plataforma sobre la cual está fija el cabezal de la cámara. A efectos de mejorar la exactitud de la longitud focal efectiva, se utilizan dos imágenes tomadas desde diferentes distancias sin ajustar los ajustes del lente.
La solicitud de patente de los EE. UU. 2003/210329 A1 se refiere a un sistema de video de múltiples cámaras y a métodos para operar un sistema de este tipo. El sistema puede incluir una pluralidad de cámaras situadas alrededor de un estadio. Se utiliza el cabezal de paneo de una cámara principal o maestra para ajustar la telemetría y el zoom de la cámara principal. Seguidamente se utilizan la telemetría y los parámetros de zoom de la cámara principal para calcular los correspondientes parámetros de telemetría, zoom y/o otros, para cada cámara de entre la pluralidad de cámaras. Es preferible que el programa de calibración cree un mapa de texturas de la superficie de juego (del estadio) que está asociada con los coordenadas reales de paneo e inclinación reales para cada cámara. El mapeo archivado original del campo de juego se lleva a cabo seleccionando una pluralidad: alrededor del campo y determinando las coordenadas espaciales reales. Puede utilizarse un dispositivo de posicionamiento para generar las coordenadas de posicionamiento absolutos para una pluralidad de posiciones, para lo cual se mueve el dispositivo de posicionamiento de un punto hacia el siguiente. La selección de puntos fácilmente identificables tales como las diversas esquinas e intersecciones de líneas en una cancha de tenis hacen que sea más fácil la calibración para cada cámara. Cada pluralidad de entre la pluralidad de cámaras debe estar apuntada hacia la ubicación de cada uno de los puntos, y deben capturarse (registrarse) los ajustes de paneo e inclinación.
COMPENDIO
En vista de lo que precede, uno de los objetivos de la invención es el de resolver, o por lo menos reducir los problemas expuestos en lo que precede. En particular, uno de los objetivos consiste en proveer un método para compensar las faltas de alineación de hardware en una cámara.
De acuerdo con un primer aspecto, se logra el objetivo expuesto en lo que precede mediante un método para compensar las faltas de alineación de hardware en una cámara, como se expone en la reivindicación 1.
Una ventaja de este método es que se logran coordenadas absolutas, lo que significa por ejemplo que es posible regresar a un punto específico si se conocen sus coordenadas.
Otra ventaja del hecho de lograr coordenadas absolutas es que es posible lograr una función de máscara mejorada. Por ejemplo, si un área determinada de la imagen, tal como una puerta, está marcada con un área de privacidad, las coordenadas de esta máscara de privacidad serán recordadas independientemente de las coordenadas mecánicas de la cámara. Y otra ventaja es que es posible prefijar posiciones.
Y otra ventaja es que la función de la cámara es menos dependiente de las inexactitudes de fabricación.
Por otra parte, la parte maniobrable puede comprender un sistema óptico de zoom, y en este caso el método puede comprender recibir por lo menos una posición de zoom de dicho sistema óptico de zoom, leer datos de calibración predeterminados correspondientes a dicha por lo menos una posición de zoom, y determinar coordenadas compensadas sobre la base de dicha por lo menos una posición de zoom recibida y dichos datos de calibración predeterminados.
Una ventaja de esto es que es posible compensar las faltas de alineación óptica, que pueden variar para diferentes posiciones de zoom.
El método puede además comprende transmitir dichas coordenadas compensadas desde dicha cámara hacia un aparato de interfaz con el usuario, y presentar dichas coordenadas compensadas en dicho aparato de interfaz con el usuario.
Una ventaja de esto es que el usuario de la cámara puede ver la posición de la cámara en coordenadas absolutas.
El método puede además comprende transmitir datos de imagen a un dispositivo procesador de imágenes, transmitir dichas coordenadas compensadas hacia dicho dispositivo procesador de datos, y procesar dichos datos de imagen y dichas coordenadas compensadas en dicho dispositivo procesador de datos de imágenes.
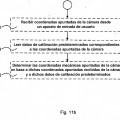
Por otra parte, el método puede además comprender recibir las coordenadas apuntadas de la cámara, leer datos de calibración predeterminados correspondientes a dichas coordenadas apuntadas recibidas de la cámara, a partir de dicha memoria comprendida en dicha cámara, determinar coordenadas mecánicas apuntadas de la cámara sobre la base de dichas coordenadas apuntadas recibidas de la cámara, y de dicho datos de calibración predeterminados, y mover dicha parte maniobrable de dicha cámara de acuerdo con dichas coordenadas mecánicas determinadas apuntadas de la cámara.
Las coordenadas apuntadas de la cámara pueden recibirse procedentes de un aparato de interfaz... [Seguir leyendo]
Reivindicaciones:
1. Un método para compensar desalineaciones de hardware en una cámara (100, 200, 300, 400, 500, 600, 700, 800, 1200, 1304) que comprende una parte maniobrable (302, 402, 502, 1202) y una parte fija (304, 404, 504, 1206), estando dicho parte maniobrable controlada por un sistema de motor de direccionamiento (1208) y en el que dicha parte maniobrable comprende un bloque de cámara (312), que comprende:
recibir (1100) coordenadas mecánicas desde dicho sistema de motor de direccionamiento (1208), donde dichas coordenadas mecánicas corresponden a una posición de paneo–inclinación, teniendo dicha posición de paneo– inclinación una posición de paneo–inclinación complementaria, siendo la posición de paneo–inclinación complementaria una posición a la que se llega mediante el sistema de motor de direccionamiento (1208) que hace rotar la parte maniobrable en 180 grados alrededor de un eje de paneo y mediante el sistema de motor de direccionamiento (1208) que hace rotar el bloque de cámara en un ángulo correspondiente a –2TU–180 grados alrededor de un eje de inclinación, hallándose TU en el intervalo de 0 a –90 grados, y siendo TU la coordenada de inclinación de las coordenadas mecánicas;
leer (1102) datos de calibración predeterminados correspondientes a dichas coordenadas mecánicas recibidas tomados de una memoria (1210) comprendida en dicha cámara (100, 200, 300, 400, 500, 600, 700, 800, 1200, 1304), comprendiendo dichos datos de calibración predeterminados un componente de compensación horizontal y un componente de compensación vertical, representando dichos componentes de compensación la diferencia entre las coordenadas mecánicas de la posición de paneo–inclinación y las coordenadas mecánicas de una posición intermedia, que se halla entre la posición de paneo–inclinación y la posición de paneo–inclinación complementaria; y
determinar (1104) coordenadas compensadas en base a dichas coordenadas mecánicas recibidas y de dichos datos de calibración predeterminados.
2. El método de acuerdo con la reivindicación 1, en el que dicha parte maniobrable comprende un sistema óptico de zoom, comprendiendo además dicho método
recibir (1106) por lo menos una posición de zoom de dicho sistema óptico de zoom
leer (1108) de dicha memoria datos de calibración predeterminados correspondientes a dicha por lo menos una posición de zoom; y
determinar (1110) coordenadas compensadas en base a dicha por lo menos una posición de zoom recibida y de dichos datos de calibración predeterminados.
3. El método de acuerdo con cualquiera de las reivindicaciones precedentes, en el que dicho método comprende además:
transmitir (1112) dichas coordenadas compensadas desde dicha cámara hacia un aparato de interfaz con usuario, y presentar (1114) dichas coordenadas compensadas en dicho aparato de interfaz con usuario.
4. El método de acuerdo con cualquiera de las reivindicaciones precedentes, en el que dicho método comprende además:
transmitir (1116) datos de imagen a un dispositivo procesador de imágenes, transmitiéndose (1118) dichas coordenadas compensadas a dicho dispositivo procesador de datos de imagen; y
procesar (1120) dichos datos de imágenes y dichas coordenadas compensadas en dicho dispositivo procesador de datos de imagen.
5. El método de acuerdo con cualquiera de las reivindicaciones precedentes, en el que dicho método comprende además:
recibir (1122) coordenadas apuntadas de la cámara;
leer (1124) datos de calibración predeterminados correspondientes a dicha coordenadas apuntadas recibidas de la cámara, tomados de dicha memoria comprendida en dicha cámara;
determinar (1126) coordenadas mecánicas apuntadas de la cámara en base a dichas coordenadas apuntadas recibidas de la cámara y de dichos datos de calibración predeterminados; y
mover dicha parte maniobrable de dicha cámara de acuerdo con dichas coordenadas mecánicas apuntadas determinadas de la cámara.
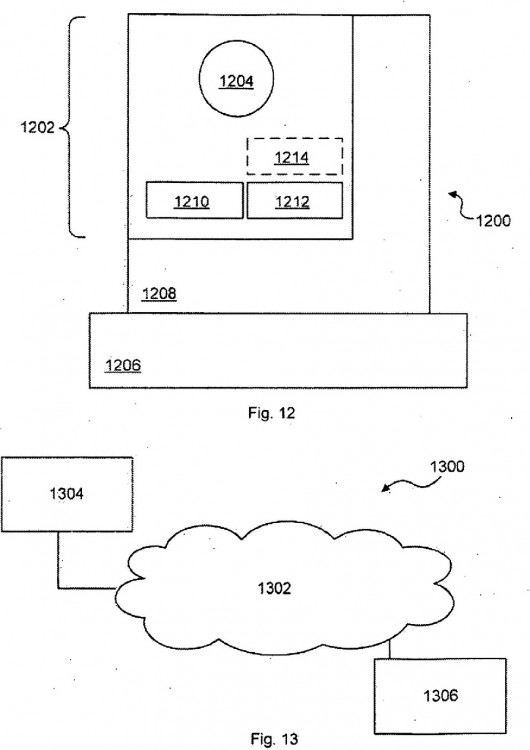
6. Una cámara (100, 200, 300, 400, 500, 600, 700, 800, 1200, 1304), que comprende:
una parte maniobrable (302, 402, 502, 1202) que comprende un sistema óptico (1206),
una parte fija (304, 404, 504, 1206), un sistema de motor de direccionamiento (1208) dispuesto para controlar dicha parte maniobrable (302, 402, 502, 1202), en el que dicha parte maniobrable comprende un bloque de cámara (312);
una memoria (1210) dispuesta para contener datos de calibración predeterminados,
un procesador (1212) configurado para recibir coordenadas mecánicas procedentes de dicho sistema de motor de direccionamiento, en el que dichas coordenadas mecánicas corresponden a una posición de paneo–inclinación, teniendo dicha posición de paneo–inclinación una posición de paneo–inclinación complementaria, siendo la posición de paneo–inclinación complementaria una posición a la cual se llega mediante el sistema de motor de direccionamiento (1208) que hacer rotar la parte maniobrable en 180 grados y mediante el sistema de motor de direccionamiento (1208) que hace rotar el bloque de cámara en un ángulo correspondiente a –2TU–180 grados alrededor de un eje de inclinación, hallándose TU en el intervalo de 0 a –90 grados y . en el que TU es la coordenada de inclinación de las coordenadas mecánicas, para leer datos de calibración predeterminados tomados de dicho memoria, en el que dichos datos de calibración predeterminados comprenden un componente de compensación horizontal y un componente de compensación vertical, representando dichos componentes de compensación la diferencia entre las coordenadas mecánicas de la posición de paneo–inclinación y la posición de paneo–inclinación complementaria, que se halla entre la posición de paneo–inclinación y la posición de paneo– inclinación complementaria, y para determinar coordenadas compensadas sobre la base de dichas coordenadas mecánicas y de dichos datos de calibración predeterminados.
7. La cámara de acuerdo con la reivindicación 6, en la que dicho sistema óptico de dicha parte maniobrable comprende un sistema óptico de zoom, y dicho procesador está además configurado para recibir al menos una posición de zoom de dicho sistema óptico de zoom, y para determinar coordenadas compensadas sobre la base de dicha por lo menos una posición de zoom recibida y de dichos datos de calibración predeterminados.
8. La cámara de acuerdo con la reivindicación 6 ó 7, que además comprende:
un transmisor (1214) adaptado para transmitir dichas coordenadas compensadas desde dicha cámara a un aparato de interfaz con usuario (1306).
9. La cámara de acuerdo con la reivindicación 6, 7 u 8, en la que dicho transmisor está además adaptado para transmitir datos de imagen y dichas coordenadas compensadas hacia un dispositivo procesador de imágenes.
10. La cámara de acuerdo con las reivindicaciones 6, 7, 8 ó 9, en la que dicho procesador está además configurado para recibir coordenadas apuntadas de la cámara correspondientes a dichas coordenadas apuntadas recibidas de la cámara tomados de dicho memoria comprendida en dicha cámara, y para determinar coordenadas mecánicas apuntadas de la cámara sobre la base de dichas coordenadas apuntadas recibidas de la cámara y de dichos datos de calibración predeterminados, y en la que dicho sistema de motor de direccionamiento está configurado para mover dicha parte maniobrable de dicha cámara de acuerdo con dichas coordenadas mecánicas apuntadas determinadas de la cámara.
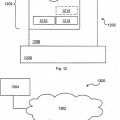
11. Un sistema (1300), que comprende:
una red de datos (1392);
un aparato de interfaz con usuario (1306) conectado a dicha red de datos; y
por lo menos una cámara (100, 200, 300, 400, 500, 600, 700, 800, 1200, 1304) de acuerdo con cualquier de las reivindicaciones 6 a 10.
12. Un programa de computadora que comprende instrucciones de software dispuestas para llevar a cabo el método de acuerdo con cualquiera de los reivindicaciones 1 a 5 cuando ha sido descargadas y se ejecutan en un aparato.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA LA COMUNICACIÓN DE DATOS EN UN SISTEMA DE VIDEO, del 8 de Noviembre de 2011, de SENSORMATIC ELECTRONICS, LLC: Un procedimiento para el control y realización de auto-modelado de una cámara de vigilancia, controlable configurada para proporcionar una señal de […]
 DISPOSITIVO PORTATIL, del 28 de Octubre de 2010, de STORM, MASON RICARDO: Un sistema de comunicación que comprende:
i) una pluralidad de unidades de comunicación móviles, estando dichas unidades adaptadas para obtener datos en forma […]
DISPOSITIVO PORTATIL, del 28 de Octubre de 2010, de STORM, MASON RICARDO: Un sistema de comunicación que comprende:
i) una pluralidad de unidades de comunicación móviles, estando dichas unidades adaptadas para obtener datos en forma […]
 MEJORAS EN O RELACIONADAS CON LA CALIBRACIÓN DE CÁMARAS DE INFRARROJOS, del 18 de Enero de 2011, de SELEX GALILEO LTD: Un método de calibración un detector infrarrojo que usa una superficie de referencia de temperatura ajustable dentro de su campo de visión, método […]
MEJORAS EN O RELACIONADAS CON LA CALIBRACIÓN DE CÁMARAS DE INFRARROJOS, del 18 de Enero de 2011, de SELEX GALILEO LTD: Un método de calibración un detector infrarrojo que usa una superficie de referencia de temperatura ajustable dentro de su campo de visión, método […]
 SISTEMAS Y PROCEDIMIENTOS PARA VALORAR CUANTITATIVAMENTE LA CALIDAD DE UNA IMAGEN PRODUCIDA POR UN SISTEMA DE FORMACION DE IMAGENES, del 17 de Enero de 2011, de GENERAL ELECTRIC COMPANY: Unos sistemas y procedimientos para valorar cuantitativamente la calidad de una imagen producida por un sistema de formación de imágenes.Unos procedimientos y sistemas […]
SISTEMAS Y PROCEDIMIENTOS PARA VALORAR CUANTITATIVAMENTE LA CALIDAD DE UNA IMAGEN PRODUCIDA POR UN SISTEMA DE FORMACION DE IMAGENES, del 17 de Enero de 2011, de GENERAL ELECTRIC COMPANY: Unos sistemas y procedimientos para valorar cuantitativamente la calidad de una imagen producida por un sistema de formación de imágenes.Unos procedimientos y sistemas […]
Método y sistema para calibrar una cámara infrarroja, del 1 de Julio de 2020, de Tecnobit S.L: Un metodo para calibrar una camara infrarroja, el metodo comprende el paso de: - establecer un valor de tiempo de integracion para una […]
Dispositivo y método para el posicionamiento relativo de sistemas ópticos de varias aberturas que comprenden varios canales ópticos en relación con un sensor de imagen, del 29 de Abril de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo para el posicionamiento relativo de sistemas ópticos de varias aberturas que comprende varios canales ópticos (14a-f) en relación con un […]
ESTRUCTURA DE SOPORTE PARA UN SITEMA DE CALIBRACION DE CAMARAS MULTIOBJETIVO, del 23 de Enero de 2020, de AIMOTIVE KFT: 1. Estructura de soporte para un equipo de calibración con múltiples patrones, comprendiendo la estructura de soporte elementos de fijación para fijar paneles con patrón […]
Calibración de sensor y estimación de posición en base a la determinación del punto de fuga, del 8 de Enero de 2020, de QUALCOMM INCORPORATED: Un procedimiento que comprende: capturar una imagen de una escena por una unidad de captura de imágenes de un dispositivo […]