CARRUSEL PARA MAQUINA ENVASADORA AUTOMATICA DE TIPO HORIZONTAL.
Carrusel para máquina envasadora automática de tipo horizontal.
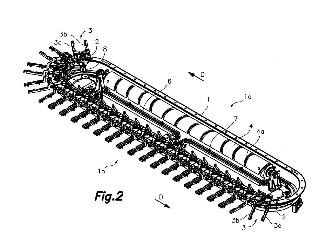
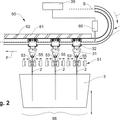
El carrusel comprende una guía (1) definiendo un circuito cerrado con un tramo de trabajo (1a) y un tramo de retorno (1b), una pluralidad de carros portapinzas (2) movibles a lo largo de dicha guía, con una pinza (3) para agarrar envases instalada sobre cada carro, una leva de tambor (4) para arrastrar los carros portapinzas (2) a lo largo del tramo de trabajo (1a), y un miembro de tracción flexible (6) para arrastrar los carros portapinzas (2) a lo largo del tramo de retorno (1b). El carrusel comprende unos medios de desacoplamiento y unos medios de retención para acumular los carros portapinzas (2), desacoplados del miembro de tracción flexible (6), en el tramo de retorno (1b) en una posición de mantenimiento, dejando despejado el tramo de trabajo (1a), y unos medios de arrastre auxiliares y unos medios de reacoplamiento para devolver los carros portapinzas a una posición de trabajo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100539.
Solicitante: MESPACK, SL.
Inventor/es: MARTI ROCHE,ENRIC, FITE SALA, MENNA, MORA FLORES,FRANCISCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B43/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › Alimentación de sacos flexibles o de cintas de cartón, en forma plana o plegada; Alimentación de sacos planos unidos para formar una serie o una cadena.
- B65G17/12 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 17/00 Transportadores que tienen un elemento de tracción sin fin, p.ej. una cadena que transmite el movimiento a una superficie portante de cargas continua o sensiblemente continua, o a una serie de portacargas individuales; Transportadores de cadenas sin fin en los que las cadenas constituyen la superficie que lleva la carga. › que comprende una serie de portacargas individuales fijadas o normalmente fijadas al elemento de tracción.
Fragmento de la descripción:
CARRUSEL PARA MÁQUINA ENVASADORA AUTOMÁTICA DE TIPO HORIZONTAL
Campo de la técnica La presente invención concierne a un carrusel para una máquina envasadora s automática de tipo horizontal, comprendiendo una pluralidad de carros portapinzas que son movidos a lo largo de un dispositivo de guía que tiene un tramo de trabajo y un tramo de retorno, y unos medios de desacoplamiento para situar dichos carros portapinzas acumulados en el tramo de retorno en una posición de mantenimiento dejando despejado el tramo de trabajo con el fin de permitir efectuar tareas de limpieza y mantenimiento en diferentes dispositivos y unidades situadas en el tramo de trabajo sin el impedimento que representan los carros portapinzas.
Antecedentes de la invención El documento ES 1070247 U da a conocer una máquina envasadora automática de tipo horizontal que incluye sucesivas unidades operativas tales como unidades de suministro, llenado, cierre y entrega de envases, y un carrusel que mueve una pluralidad de carros, cada uno de los cuales lleva una pinza configurada para agarrar un envase, a lo largo de un dispositivo de guía que define un circuito cerrado horizontal que tiene un tramo de trabajo a través de dichas unidades operativas y un tramo de retorno. El carrusel incluye una leva de tambor provista de una ranura de leva en la que se acopla un seguidor de leva montado en cada carro para arrastrar los carros a lo largo de dicho tramo de trabajo, y un miembro de tracción flexible, tal como una correa, cadena de rodillos o similar, que lleva fijados unos elementos de arrastre que se acoplan con unos correspondientes elementos de acoplamiento montados en los carros para arrastrar los carros a lo largo de dicho tramo de retorno.
Un inconveniente del carrusel del citado documento ES 1070247 U es que los carros con sus correspondientes pinzas están permanentemente acoplados ya sea a la leva de tambor o al miembro de tracción flexible, de manera que cuando la máquina envasadora es detenida para efectuar tareas de mantenimiento, una pluralidad de carros con sus correspondientes pinzas quedan situados en el tramo de trabajo y con ello dificultan las tareas de mantenimiento a realizar en la leva de tambor y en las unidades operativas situadas a lo largo del tramo de trabajo.
Exposición de la invención 35 La presente invención contribuye a mitigar el anterior y otros inconvenientes aportando un carrusel para una máquina envasadora automática de tipo horizontal, que
comprende un dispositivo de guía definiendo un circuito cerrado horizontal que tiene un
tramo de trabajo adyacente a sucesivas unidades operativas de dicha máquina
envasadora y un tramo de retorno, una pluralidad de carros portapinzas acoplados a
dicho dispositivo de guía de manera que pueden moverse libremente a lo largo del
S mismo, con al menos una pinza configurada para agarrar envases instalada sobre cada
carro portapinzas, una leva de tambor provista de una ranura de leva en la que se
acopla un seguidor de leva montado en cada carro portapinzas para arrastrar los carros
portapinzas a lo largo de dicho tramo de trabajo, y un miembro de tracción flexible, tal
como una cadena de rodillos o similar, que lleva fijados unos elementos de arrastre que
10 se acoplan con unos correspondientes elementos de acoplamiento montados en los
carros portapinzas para arrastrar los carros porta pinzas· a lo largo de dicho tramo de
retorno.
El carrusel de la presente invención comprende además unos medios de
desacoplamiento que pueden ser activados para desacoplar dichos elementos de
15 acoplamiento de dichos elementos de arrastre al inicio del tramo de retorno, y unos
medios de retención para mantener los elementos de acoplamiento desacoplados de
los elementos de arrastre a lo largo de al menos parte del tramo de retorno, con lo que
los carros portapinzas se acumulan los unos al lado de los otros en el tramo de retorno
en una posición de mantenimiento dejando despejado el tramo de trabajo. Así, cuando
20 los elementos de acoplamiento están desacoplados de los elementos de arrastre, los
carros portapinzas pueden ser movidos libremente a lo largo del tramo de retorno
independientemente de si el mencionado elemento de tracción flexible está en
movimiento o detenido.
El carrusel de la presente invención comprende además unos medios de
25 arrastre auxiliares para arrastrar los carros portapinzas a lo largo del tramo de retorno
mientras los elementos de acoplamiento son mantenidos desacoplados de los
elementos de arrastre del miembro de tracción flexible principal, y unos medios de
reacoplamiento activables para acoplar de nuevo dichos elementos de acoplamiento
con los elementos de arrastre del miembro de tracción flexible principal al final del tramo
30 de retorno, con lo que los carros portapinzas son devueltos a una posición de trabajo.
En una realización, cada uno de los elementos de acoplamiento está instalado
de manera que puede moverse a lo largo de un elemento de guía vertical fijado al
correspondiente carro portapinzas entre una posición inferior, en la que el elemento de
acoplamiento está acoplado a uno de los elementos de arrastre del miembro de tracción
35
flexible principal, y una posición superior, en la que el elemento de acoplamiento estádesacoplado de los elementos de arrastre del miembro de tracción flexible principal.
Preferiblemente, el mencionado elemento de guía vertical está asociado a un tope que
define la posición inferior del elemento de acoplamiento, y un elemento elástico, tal
como un muelle helicoidal, está dispuesto de manera que empuja el elemento de
acoplamiento hacia la posición inferior y contra dicho tope.
S En correspondencia, los mencionados medios de desacoplamiento están
configurados para mover los elementos de acoplamiento de cada carro portapinzas
desde dicha posición inferior hasta dicha posición superior, dichos medios de retención
están configurados para mantener los elementos de acoplamiento de los carros
portapinzas en la posición superior, y dichos medios de reacoplamiento están
10 configurados para mover los elementos de acoplamiento de los carros portapinzas
desde la posición superior hasta la posición inferior.
En una realización, los medios de retención comprenden una pista de soporte
dispuesta a lo largo de al menos parte del tramo de retorno y cada elemento de
acoplamiento tiene fijada una rueda o patín que corre sobre dicha pista de soporte
15 cuando el elemento de acoplamiento está en dicha posición superior, y los medios de
desacoplamiento comprenden una rampa de subida que puede ser movida entre una
posición retirada, fuera de la trayectoria de dicha rueda o patín cuando el elemento de
acoplamiento está en la posición inferior, y una posición operativa en la que dicha
rampa de subida tiene un extremo de entrada situado a un nivel más bajo que la
20 trayectoria de la rueda o patín cuando el elemento de acoplamiento está en la posición
inferior y un extremo de salida situado adyacente y al mismo nivel que un extremo de
entrada de la pista de soporte, con lo que las ruedas o patines corren sobre dicha
rampa de subida cuando la misma está en dicha posición operativa para mover los
elementos de acoplamiento desde la posición inferior hasta la posición superior.
25 En esta misma realización, los medios de reacoplamiento comprenden una
rampa de bajada que puede ser movida entre una posición retirada, fuera de la
trayectoria de dicha rueda o patín cuando el elemento de acoplamiento está en la
posición inferior, y una posición operativa en la que dicha rampa de bajada tiene un
extremo de entrada situado adyacente y al mismo nivel que un extremo de salida de la
30 pista de soporte y un extremo de salida situado a un nivel más bajo que la trayectoria
de la rueda o patín cuando el elemento de acoplamiento está en la posición inferior, con
lo que las ruedas o patines corren sobre dicha rampa de bajada cuando la misma está
en dicha posición operativa para mover los elementos de acoplamiento desde la
posición superior hasta la posición inferior.
35
También en esta realización, los medios de arrastre auxiliares comprenden unmiembro de tracción flexible auxiliar, tal como una correa, cadena de rodillos o similar,
que lleva fijado un elemento de arrastre auxiliar que se acopla con un elemento del
último carro portapinzas cuando todos los carros portapinzas están acumulados en el
tramo de retorno con sus elementos de acoplamiento mantenidos en la posición
superior por la pista de soporte para mover...
Reivindicaciones:
1.Carrusel para máquina envasadora automática de tipo horizontal, que
s comprende:
un dispositivo de guía (1) definiendo un circuito cerrado horizontal que tiene un
tramo de trabajo (1 a) adyacente a sucesivas unidades operativas de dicha máquina
envasadora y un tramo de retorno (1 b) ;
una pluralidad de carros portapinzas (2) acoplados a dicho dispositivo de guía
10 (1) de manera que pueden moverse libremente a lo largo del mismo, con al menos una
pinza (3) configurada para agarrar envases (A) instalada sobre cada carro portapinzas
(2) ;
una leva de tambor (4) provista de una ranura de leva (4a) en la que se acopla
un seguidor de leva (5) montado en cada carro portapinzas (2) para arrastrar los carros
15 portapinzas (2) a lo largo de dicho tramo de trabajo (1a) ; y
un miembro de tracción flexible (6) que lleva fijados unos elementos de arrastre
(7) que se acoplan con unos correspondientes elementos de acoplamiento (8)
montados en los carros portapinzas (2) para arrastrar los carros portapinzas (2) a lo
largo de dicho tramo de retorno (1 b) ,
20 caracterizado porque comprende además:
unos medios de desacoplamiento activables para desacoplar dichos elementos
de acoplamiento (8) de dichos elementos de arrastre (7) al inicio del tramo de retorno
(1 b) ;
unos medios de retención para mantener los elementos de acoplamiento (8)
25 desacoplados de los elementos de arrastre (7) a lo largo de al menos parte del tramo de
retorno (1 b) , con lo que los carros portapinzas (2) se acumulan los unos al lado de los
otros en el tramo de retorno (1 b) en una posición de mantenimiento dejando despejado
el tramo de trabajo (1 a) ;
unos medios de arrastre auxiliares activables para arrastrar los carros
30 portapinzas (2) a lo largo del tramo de retorno (1 b) mientras los elementos de
acoplamiento (8) son mantenidos desacoplados de los elementos de arrastre (7) ; y
unos medios de reacoplamiento activables para acoplar de nuevo dichos
elementos de acoplamiento (8) con los elementos de arrastre (7) al final del tramo de
retorno (1 b) , con lo que los carros porta pinzas (2) son devueltos a una posición de
35 trabajo.
2. Carrusel según la reivindicación 1, caracterizado porque cada uno de los
elementos de acoplamiento (8) está instalado de manera que puede moverse a lo largo
de un elemento de guía vertical (9) fijado al correspondiente carro portapinzas (2) entre
una posición inferior, en la que el elemento de acoplamiento (8) está acoplado a uno de
S los elementos de arrastre (7}, y una posición superior, en la que el elemento de
acoplamiento (8) está desacoplado de los elementos de arrastre (7}, y dichos medios de
desacoplamiento están configurados para mover los elementos de acoplamiento (8)
desde dicha posición inferior hasta dicha posición superior, dichos medios de retención
están configurados para mantener los elementos de acoplamiento (8) en la posición
10 superior, y dichos medios de reacoplamiento están configurados para mover los
elementos de acoplamiento (8) desde la posición superior hasta la posición inferior.
3.Carrusel según la reivindicación 2, caracterizado porque los medios de
retención comprenden una pista de soporte (1 O) dispuesta a lo largo de al menos parte
del tramo de retorno (1 b) y cada elemento de acoplamiento (8) tiene fijada una rueda o
15 patín (11) que corre sobre dicha pista de soporte (10) cuando el elemento de
acoplamiento (8) está en dicha posición superior.
4. Carrusel según la reivindicación 3, caracterizado porque los medios de
desacoplamiento comprenden una rampa de subida (12) movible entre una posición
retirada, fuera de la trayectoria de dicha rueda o patín (11) cuando el elemento de
20 acoplamiento (8) está en la posición inferior, y una posición operativa en la que dicha
rampa de subida (12) tiene un extremo de entrada situado a un nivel más bajo que la
trayectoria de la rueda o patín (11) cuando el elemento de acoplamiento (8) está en la
posición inferior y un extremo de salida situado adyacente y al mismo nivel que un
extremo de entrada de la pista de soporte (10}, con lo que las ruedas o patines (11)
25 corren sobre dicha rampa de subida (12) cuando la misma está en dicha posición
operativa para mover los elementos de acoplamiento (8) desde la posición inferior hasta
la posición superior.
5. Carrusel según la reivindicación 4, caracterizado porque los medios de
reacoplamiento comprenden una rampa de bajada (13) movible entre una posición
30 retirada, fuera de la trayectoria de dicha rueda o patín (11) cuando el elemento de
acoplamiento está en la posición inferior, y una posición operativa en la que dicha
rampa de bajada (13) tiene un extremo de entrada situado adyacente y al mismo nivel
que un extremo de salida de la pista de soporte (1 O) y un extremo de salida situado a
un nivel más bajo que la trayectoria de la rueda o patín (11) cuando el elemento de
35
acoplamiento está en la posición inferior, con lo que las ruedas o patines (11) corrensobre dicha rampa de bajada (13) cuando la misma está en dicha posición operativa
Patentes similares o relacionadas:
 Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Sistema robótico de recogida de bolsitas y procedimiento para el montaje y la recogida de bolsitas no llenas dotadas de boquilla, del 17 de Julio de 2019, de Scholle IPN IP B.V: Un sistema robótico de recogida de bolsitas para la recogida de bolsitas no llenas dotadas de boquilla para ser transportadas hasta un […]
Sistema de desembalado de cajas de cartón, del 8 de Mayo de 2019, de Graphic Packaging International, LLC: Sistema (10/200) para retirar cajas de cartón de contenedores para cargarlas en una máquina para el envasado de productos, que comprende: […]
Método y aparato para el embalaje de ítems, líquidos o materiales sueltos en bolsas de películas, y un rollo de bolsa, del 17 de Abril de 2019, de Schur Technology A/S: Un método para embalar artículos, líquido o material suelto en bolsas de películas que se transportan a través de una estación de llenado […]
Dispositivo de control óptico de una cara de un recorte, máquina de tratamiento de recortes y plegadora-encoladora que comprende el dispositivo, del 20 de Marzo de 2019, de BOBST MEX SA: Dispositivo de control óptico de una cara de un recorte , que comprende: - un transportador de vacío , adecuado para transportar […]
Banda de bolsa y método para empaquetar un producto en bolsas de película utilizando una banda de bolsa, del 12 de Marzo de 2019, de Schur Technology A/S: Una banda de bolsa para artículos de empaquetado, líquido o material suelto en bolsas de película que se proporcionan en una banda contigua de artículos de bolsa, […]
Montaje y método para el almacenamiento de recipientes, del 14 de Febrero de 2019, de FUJI SEAL INTERNATIONAL, INC: Montaje para el almacenamiento de una pluralidad de recipientes flexibles (1, 121a a f, 122a a f, 123a a f, 124a a f), el montaje comprende una pluralidad […]
Máquina envasadora automática de tipo horizontal, del 9 de Enero de 2019, de MESPACK, S.L: Máquina envasadora automática de tipo horizontal que comprende: un transportador que mueve una pluralidad de carros portapinzas en una dirección de avance (D) […]