Dispositivo de agarre, por ejemplo para un robot.
Dispositivo de agarre para agarrar un producto, tal como un producto alimenticio,
en particular una pieza decarne, comprendiendo dicho dispositivo (1) de agarre
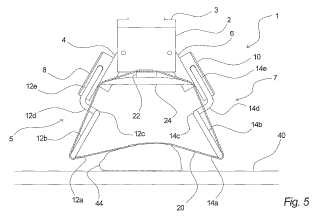
- una parte de base (2),
- por lo menos dos brazos de agarre (4, 6) soportados por dicha parte de base (2), estando por lo menos unode dichos dos brazos de agarre (4, 6) suspendido de manera pivotante sobre dicha parte de base (2),
- por lo menos dos pinzas de agarre (12, 14), siendo cada pinza de agarre (12, 14) soportada por un respectivobrazo de agarre (4, 6), y
- un material (20) con forma de cinta flexible que se extiende por lo menos entre las partes inferiores de dichaspor lo menos dos pinzas de agarre (12, 14),
caracterizado porque
el material (20) con forma de cinta flexible se extiende más allá de las partes inferiores de las pinzas de agarre y a lolargo de dichas pinzas de agarre (12, 14), siendo el material con forma de cinta flexible o bien una cinta sin fin o bienuna cinta con dos extremos, y caracterizado además porque el material con forma de cinta flexible está fijado a unaregleta (22) de montaje dispuesta sobre dicha parte de base (2) y/o el material con forma de cinta flexible está fijadoal dispositivo de agarre mediante unos medios de montaje liberables.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DK2008/000308.
Solicitante: Marel A/S.
Inventor/es: PEDERSEN,BJORN HEIDE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/90 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
PDF original: ES-2442007_T3.pdf
Fragmento de la descripción:
Dispositivo de agarre, por ejemplo para un robot.
Campo de la invención La presente invención se refiere a un dispositivo de agarre dispuesto para agarrar un producto, tal como un producto alimenticio, en particular una pieza de carne, y para suministrarlo de nuevo.
Además, la invención se refiere a un procedimiento para utilizar un dispositivo de agarre de este tipo, en el que se agarra un producto seleccionado y se mueve a una ubicación seleccionada.
Antecedentes de la invención El documento EP 1 792 831 A1 da a conocer un agarrador para su utilización en relación con la manipulación de productos alimenticios, agarrador que presenta dos mandíbulas o palas mediante las que se agarra un producto, producto que va a moverse desde un transportador hasta una posición seleccionada. Las mandíbulas o palas están dispuestas de manera que agarran un producto, que se empujará hacia arriba entre las mandíbulas o palas. Además, este agarrador presenta un eyector mecánico para eyectar el producto, a medida que se abren las mandíbulas o palas, eyector que sirve para superar un posible pegado del producto a las mandíbulas o palas. De ese modo, el eyector también contribuye a controlar dónde se coloca el producto.
Además, el documento WO 2007/093774 A1 da a conocer diferentes formas de realización de agarradores en los que se utiliza una cinta flexible junto con brazos de agarre para manipular un producto que se está agarrando desde 25 una cinta transportadora. Para estas formas de realización, la cinta flexible se dispone de tal manera que ambos extremos se fijan a cada lado de dos brazos de agarre. Estos dos brazos de agarre se disponen para el desplazamiento transversal uno con respecto al otro ya que pueden desplazarse sobre una barra horizontal. Por tanto la cinta se guía por debajo de estos dos brazos de agarre. Durante la utilización, la disposición de agarre total desciende sobre un producto de modo que los extremos de los brazos de agarre se sitúan a cada lado del producto 30 y cerca del transportador, y de modo que la cinta flexible se extiende sobre el producto en esta separación. Entonces, los dos brazos de agarre se aproximan entre sí de modo que los extremos de los dos brazos de agarre, junto con la cinta flexible que se dobla alrededor de los extremos de los dos brazos de agarre, se mueven entre el transportador y el producto, mediante lo cual la cinta flexible envuelve parcialmente el producto rodeándolo. Para estas formas de realización hay más partes implicadas, partes que también se desplazan a lo largo de la barra horizontal. Una forma de realización particular presenta dos brazos adicionales incluidos en la disposición de agarre, y otra forma de realización particular presenta partes en las que se fijan los extremos de la cinta flexible, y que contribuyen a controlar la cinta flexible, por ejemplo el apriete de la cinta y la longitud de la cinta que se extiende entre los extremos de los dos brazos de agarre.
Además, la patente US no 5.562.386 se refiere a un aparato de agarre (o dispositivo de agarre) según el preámbulo de la reivindicación 1, para agarrar un contenedor de basura. El aparato de agarre presenta lo que se describe como dos elementos de brazo de soporte, que se conectan a través de una junta de codo con elementos de brazo. Los elementos de brazo de soporte pueden pivotar en relación a un alojamiento por medio de cilindros de trabajo y el movimiento de pivote de los elementos de brazo con respecto a los elementos de brazo de soporte se controla 45 mediante brazos de articulación. Una cinta de agarre se conecta a los extremos de los elementos de brazo, es decir, se fija con los extremos de la cinta de agarre a los extremos de los elementos de brazo por medio de pinzas.
El documento WO 2008/135720 A1, correspondiente al documento EP 2 155 589 A1 (artículo 54 (3) CPE) da a conocer un dispositivo agarrador para recoger y liberar un producto. Este dispositivo agarrador incluye un soporte y
un par de agarradores montados de manera pivotante en el soporte para el movimiento de sus extremos distales aproximándose y alejándose entre sí. Se dispone una cinta para extenderse a través del hueco definido entre los extremos distales de los agarradores cuando se separan de modo que la cinta puede extenderse sobre el producto que va a recogerse y extenderse alrededor del producto cuando los agarradores se han movido aproximándose entre sí para recoger el producto.
Es un objetivo de la invención proporcionar un dispositivo de agarre mejorado.
Además, es un objetivo de la invención proporcionar un dispositivo de agarre que presenta una eficacia, precisión y velocidad de procesamiento mejoradas.
Además, es un objetivo de la invención proporcionar un dispositivo de agarre que es flexible durante la utilización, y que presenta ventajas mejoradas por lo que respecta a las condiciones higiénicas.
Además, es un objetivo de la invención proporcionar un procedimiento mejorado, mediante el cual se agarra un 65 producto seleccionado y se mueve a una ubicación seleccionada.
Estas y otras ventajas de la invención se explicarán adicionalmente a continuación.
La invención La invención se refiere a un dispositivo de agarre según la reivindicación 1.
De este modo, se obtienen varias ventajas con respecto a la técnica anterior, incluyendo una construcción relativamente simple del dispositivo de agarre y una estructura que permite un ajuste automático del dispositivo de agarre al tamaño y la forma del producto. También se logra que el dispositivo de agarre no sea sensible por lo que 10 respecta a la altura o el nivel por encima de, por ejemplo, una superficie de soporte tal como por ejemplo una cinta transportadora, sobre la que está ubicado el producto, ya que, por ejemplo, el dispositivo de agarre podrá rodear lo más posible el producto, por ejemplo hasta que se entre en contacto con la superficie de soporte, y después de lo cual puede rodear adicionalmente el producto a medida que el dispositivo de agarre se eleva hacia arriba. Esto también conlleva una velocidad de funcionamiento mejorada del dispositivo de agarre. Se obtienen ventajas adicionales utilizando una pinza de agarre, que incluye un peso reducido, pero además también que el material con forma de cinta flexible puede adaptarse de manera relativamente libre a la forma del producto agarrado, no sólo en la dirección de la anchura/altura, sino también en la dirección longitudinal del producto.
La pinza de agarre puede configurarse en una amplia variedad de formas y utilizando una amplia variedad de materiales, mediante lo cual puede lograrse una flexibilidad adecuada así como un peso bajo deseado, que es esencial con vistas a una alta velocidad de funcionamiento deseada. Además, la elasticidad y flexibilidad del dispositivo de agarre también facilita la sensibilidad reducida, al hacer funcionar el dispositivo de agarre, por lo que respecta a la altura o el nivel por encima de, por ejemplo, una superficie de soporte tal como por ejemplo una cinta transportadora.
El dispositivo de agarre según la invención puede utilizarse en relación con aparatos y procedimientos que utilizan la técnica robótica del tipo dado a conocer en, por ejemplo, los documentos WO 01/22043, WO 2006/061024 y WO 2007/134603.
Ha de observarse que, anteriormente y a continuación, términos tales como altura, nivel, por encima de, por debajo de, vertical, horizontal, etc. se han utilizado al explicar las formas de realización según la invención. Ha de entenderse que estos términos están relacionados con un dispositivo de agarre utilizado para agarrar y elevar un producto que se lleva por un soporte esencialmente horizontal tal como se ilustra en las figuras. Sin embargo, se entenderá que variaciones de esto, por ejemplo por lo que respecta a las direcciones vertical y/u horizontal, entran dentro del alcance de la presente invención.
Convenientemente, ambas por lo menos dos partes de agarre pueden estar suspendidas de manera pivotante.
El dispositivo de agarre comprende una parte de base que lleva dichas por lo menos dos partes de agarre, y sobre la 40 que por lo menos una de dichas partes de agarre está suspendida de manera pivotante.
De este modo se obtiene un ensamblaje relativamente fácil y simple del dispositivo de agarre, por ejemplo en un robot.
Según una forma de realización ventajosa, un brazo de agarre puede presentar un adaptador montado, adaptador que está dispuesto para llevar dicha pinza de agarre.
De este modo se obtiene que una pinza de agarre puede montarse fácilmente en un brazo de agarre dado, pudiendo dicho adaptador adaptarse a las condiciones dadas, y mediante lo cual pueden intercambiarse... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de agarre para agarrar un producto, tal como un producto alimenticio, en particular una pieza de carne, comprendiendo dicho dispositivo (1) de agarre
- una parte de base (2) ,
- por lo menos dos brazos de agarre (4, 6) soportados por dicha parte de base (2) , estando por lo menos uno de dichos dos brazos de agarre (4, 6) suspendido de manera pivotante sobre dicha parte de base (2) ,
- por lo menos dos pinzas de agarre (12, 14) , siendo cada pinza de agarre (12, 14) soportada por un respectivo brazo de agarre (4, 6) , y
- un material (20) con forma de cinta flexible que se extiende por lo menos entre las partes inferiores de dichas por lo menos dos pinzas de agarre (12, 14) ,
caracterizado porque el material (20) con forma de cinta flexible se extiende más allá de las partes inferiores de las pinzas de agarre y a lo largo de dichas pinzas de agarre (12, 14) , siendo el material con forma de cinta flexible o bien una cinta sin fin o bien una cinta con dos extremos, y caracterizado además porque el material con forma de cinta flexible está fijado a una regleta (22) de montaje dispuesta sobre dicha parte de base (2) y/o el material con forma de cinta flexible está fijado al dispositivo de agarre mediante unos medios de montaje liberables.
2. Dispositivo de agarre según la reivindicación 1, en el que dichos por lo menos dos brazos de agarre (4, 6) están ambos suspendidos de manera pivotante sobre dicha parte de base (2) .
3. Dispositivo de agarre según la reivindicación 1 o 2, en el que dicha pinza de agarre (12, 14) comprende una parte de montaje (14e) , dispuesta para acoplarse con un brazo de agarre (4, 6) o con un adaptador (8, 10) montado en el brazo de agarre (4, 6) , siendo dicha parte de montaje (14e) elástica.
4. Dispositivo de agarre según cualquiera de las reivindicaciones 1 a 3, en el que una parte elástica para actuar sobre el material (20) con forma de cinta flexible se selecciona de entre el grupo que consiste en un resorte de láminas (24) dispuesto sobre dicha parte de base, comprendiendo dichas pinzas de agarre (12, 14) unas propiedades elásticas, un actuador dispuesto para mover dichas partes de agarre, presentando el material con forma de cinta flexible unas propiedades elásticas inherentes y cualquier de sus combinaciones.
5. Dispositivo de agarre según cualquiera de las reivindicaciones 1 a 4, en el que dicho material (20) con forma de cinta flexible está formado con uno o más rebajes (21) que corresponden sustancialmente a la posición de los brazos de agarre (4, 6) y de unos adaptadores opcionales (8, 10) .
6. Dispositivo de agarre según cualquiera de las reivindicaciones 1 a 5, en el que dicho material (20) con forma de cinta flexible está formado con unos orificios (32) .
7. Dispositivo de agarre según la reivindicación 6, en el que dichos orificios (32) comprendidos en el material con forma de cinta flexible están distribuidos uniformemente por lo menos en una parte de la zona del material que se extiende entre dichas partes inferiores de dichas pinzas de agarre (12, 14) .
8. Dispositivo de agarre según cualquiera de las reivindicaciones 1 a 7, en el que dos o más brazos de agarre están dispuestos en por lo menos un lado del dispositivo (1) de agarre.
9. Dispositivo de agarre según cualquiera de las reivindicaciones 1 a 8, en el que el dispositivo (1) de agarre y dicho material (20) con forma de cinta flexible están formados de modo que dicho material (20) con forma de cinta flexible sea reemplazable, y en el que pueden utilizarse tamaños y/o tipos diferentes de dicho material (20) con forma de cinta.
10. Dispositivo de agarre según cualquiera de las reivindicaciones 1 a 9, en el que las pinzas de agarre (12, 14) comprenden unas partes que mantienen un producto agarrado en las direcciones longitudinales.
11. Procedimiento para utilizar un dispositivo de agarre según una o más de las reivindicaciones 1 a 10, en el que el dispositivo (1) de agarre
- a) es llevado hacia un producto alimenticio seleccionado, soportado sobre una cinta transportadora (40) ,
- b) es descendido hacia el producto alimenticio, al tiempo que los brazos de agarre (4, 6) son separados durante por lo menos parte de este movimiento, de modo que el material (20) con forma de cinta flexible se extienda sustancialmente,
- c) los brazos de agarre (4, 6) empiezan a aproximarse entre sí mientras son descendidos, o después de
haber sido descendidos, envolviendo el material (20) con forma de cinta flexible una parte del producto 5 alimenticio, de modo que la forma del producto alimenticio se vea afectada parcialmente por el mismo,
- d) el dispositivo (1) de agarre es elevado hacia arriba con los brazos de agarre (4, 6) que se mueven juntos con el material (20) con forma de cinta flexible que agarra el producto alimenticio rodeándolo,
- e) el dispositivo (1) de agarre es llevado a una ubicación seleccionada para suministrar el producto alimenticio, y
- f) los brazos de agarre (4, 6) empiezan a alejarse uno de otro, siendo el agarre liberado alrededor del producto alimenticio y empezando el material (20) con forma de cinta flexible a extenderse o a estirarse entre
las pinzas de agarre (12, 14) , de modo que el producto alimenticio se vea afectado en una dirección lejos del dispositivo de agarre.
12. Procedimiento según la reivindicación 11, en el que la etapa c empieza mientras el dispositivo (1) de agarre está
a una altura sustancialmente estacionaria por encima de la cinta transportadora (40) , o mientras el dispositivo de 20 agarre empieza a elevarse con respecto a la cinta transportadora.
13. Procedimiento según la reivindicación 11 o 12, en el que en la etapa f el material (20) con forma de cinta flexible es gradualmente liberado del producto alimenticio desde cada lado del mismo, de modo que se neutralice gradualmente una posible adhesión entre el producto alimenticio y el material (20) con forma de cinta flexible.
Patentes similares o relacionadas:
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Mecanismo de suministro de boquilla de vertido y máquina de sellado de boquilla de vertido, del 12 de Febrero de 2020, de TOYO JIDOKI CO., LTD.: Un mecanismo de suministro de boquilla de vertido que comprende: un dispositivo de retención de boquilla de vertido para retener […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Sistemas y métodos de transportador mecánico y envasado de alimentos, del 8 de Enero de 2020, de INTERCONTINENTAL GREAT BRANDS LLC: Un aparato de envasado de productos alimenticios que comprende: un transportador mecánico corriente arriba que transporta artículos […]
Dispositivo y método para transferir envases, del 23 de Octubre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Dispositivo de transferencia para transferir envases de un dispositivo de avance de envases, en el que están alineados en al […]
DISPOSITIVO PARA RECOGER Y DESPRENDER MEDIOS ÓPTICOS, del 11 de Septiembre de 2019, de GLIFSTOCK, S.L: Dispositivo para recoger y desprender medios ópticos (Cds, DVDs y Blu-Rays), el cual se ha realizado en orden a obtener mayor facilidad y abaratar el posible mantenimiento […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]