Sistema selectivo de antibloqueo de frenos.
En un vehículo que comprende un sistema de transmisión automático mecánico (10) y un sistema de antibloqueo de frenos (42),
un procedimiento para el desacoplamiento selectivo del sistema de impulsión con respecto a la rueda (60) del vehículo, que comprende:
detectar, como mínimo, un estado de funcionamiento del vehículo (110);
detectar un estado del bloqueo de las ruedas del vehículo (105);
comunicar la estado de funcionamiento y el estado de bloqueo de las ruedas del vehículo a una unidad de control lógico;
y se caracteriza por
desacoplar el sistema de impulsión con respecto a las ruedas del vehículo (60) cuando un primer estado de funcionamiento predeterminado del vehículo y un estado de bloqueo de las ruedas es comunicado por la unidad de control lógico (120), y manteniendo el acoplamiento del sistema de impulsión y las ruedas (60) del vehículo cuando un segundo estado de funcionamiento predeterminado del vehículo y situación de bloqueo de las ruedas es comunicado por la unidad de control lógico (125), correspondiendo dicho segundo estado de funcionamiento predeterminado a que el vehículo está descendiendo por una pendiente, que el vehículo está transportando una carga, que el vehículo tiene freno motor, y /o la configuración del vehículo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2006/001039.
Solicitante: VOLVO LASTVAGNAR AB.
Nacionalidad solicitante: Suecia.
Dirección: 405 08 GÖTEBORG SUECIA.
Inventor/es: KARLSSON, LARS, BERGLUND,SIXTEN, KARLSSON,SVANTE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W10/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de los acoplamientos de la cadena cinemática.
- B60W10/18 B60W 10/00 […] › incluyendo el control de sistemas de frenado.
- B60W30/02 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Control de la estabilidad en la conducción del vehículo.
- B60W30/18 B60W 30/00 […] › Propulsión del vehículo.
PDF original: ES-2381989_T3.pdf
Fragmento de la descripción:
Sistema selectivo de antibloqueo de frenos REFERENCIAS A SOLICITUDES RELACIONADAS
La presente solicitud reivindica los beneficios de la solicitud provisional de Estados Unidos Nº 60/596.205 presentada en 8 de Setiembre de 2005.
CAMPO DE LA INVENCIÓN
La presente invención se refiere de manera general a sistemas de frenado, y más particularmente a un procedimiento y un aparato para desacoplar selectivamente el sistema de impulsión de un vehículo con respecto a las ruedas durante la situación de bloqueo de las ruedas.
ANTECEDENTES DE LA INVENCIÓN
Se conocen sistemas de control de transmisiones automáticas y semiautomáticas mecánicas, (es decir, "AMT") , que son controlados, por lo menos en parte, utilizando sistemas de control electrónico basados en circuitos lógicos separados y/o microprocesadores controlados por software. Las selecciones de marchas y decisiones de cambio son realizadas basándose en ciertos parámetros medidos y/o calculados, conocidos por el sistema de control, tales como la velocidad del vehículo (o velocidad del eje de salida de la transmisión) , velocidad del eje de entrada de la transmisión, velocidad del motor, proporción de cambio de la velocidad del vehículo, proporción de cambio de la velocidad del motor, posición del acelerador, proporción de cambio de la posición del acelerador, accionamiento a fondo del acelerador, accionamiento del mecanismo de frenos, relación de velocidad acoplada en el momento y similares. Se dan a conocer ejemplos de dichos sistemas de control de transmisiones automáticas para vehículos en las patentes US Nºs: 4.361.060; 4.551.802; 4.527.447; 4.425.620; 4.463.427; 4.081.065; 4.073.203; 4.253.348; 4.038.889; 4.226.295; 3.776.048, 4.208.929; 4.039.061; 3.974.720; 3.478.851 y 3.942.393.
De manera similar, se conocen sistemas automáticos de frenado de vehículos antideslizamiento o antibloqueo (ABS) . De modo general, cuando tiene lugar el bloqueo o deslizamiento de la ruedas de un vehículo, se detecta el bloqueo real o inminente de bloqueo de una rueda y se deja que las ruedas giren a la velocidad del vehículo antes de volver a aplicar los frenos del vehículo. Se describen ejemplos de sistemas de antideslizamiento o antibloqueo de frenos en las patentes US Nºs: 3.767.270; 3.768.872; 3.854.556; 3.920.284; 3.929.382; 3.996.267, y 3.995.912. La patente US Nº 4.899.279 da a conocer sistemas AMT y ABS para vehículos que durante el bloqueo real o inminente de una rueda, el sistema ABS se comunica con el sistema de control de AMT del vehículo para desacoplar el motor del vehículo, o sistema de impulsión del vehículo, con respecto a las ruedas del mismo. El desacoplamiento del motor del vehículo con respecto a las ruedas reduce la tendencia de la inercia del motor y del embrague para dificultar la capacidad de las ruedas a girar a la velocidad del vehículo.
Un procedimiento y aparato de acuerdo con el preámbulo de las reivindicaciones 1 y 16 son conocidos por el documento DE 10157711.
Si bien el desacoplamiento de un motor o sistema de impulsión de un vehículo con respecto a las ruedas del vehículo para permitir el giro de estas es beneficioso en muchas circunstancias, hay circunstancias en las que el desacoplamiento puede ser desventajoso. Por ejemplo, si un semirremolque pesado circula descendiendo por una pendiente fuerte y tiene un bloqueo de las ruedas inminente o real (tal como puede ocurrir como resultado del freno motor o una superficie no consistente de la vía de circulación) , el desacoplamiento del motor del vehículo con respecto a las ruedas puede ser desventajoso. De manera más específica, si las ruedas del semirremolque son desacopladas con respecto al motor, el camión perderá momentáneamente la ventaja del freno motor, situación que puede tener como resultado de que el camión se dispare hacia delante y/o provoque que el conductor pierda el control del vehículo. Además, el desacoplamiento del embrague elimina la resistencia al movimiento proporcionada por el acoplamiento del eje de impulsión con la inercia del motor. Esta inercia del motor provocará una aceleración más lenta del vehículo cuando está conectado al eje de impulsión. Igualmente esta situación puede provocar que el conductor pierda el control o, por lo menos, se sienta poco cómodo cuando esto ocurra. El motor de referencia puede servir como ejemplo de un primer conjunto motriz del vehículo, término que comprende cualquier conjunto generador de potencia que proporcione potencia al eje de impulsión del vehículo u otros componentes del vehículo que consumen potencia. Algunos ejemplos de dispositivos motrices principales son motores diesel, motores eléctricos, y sistemas de potencia de tipo híbrido.
Por lo tanto, la presente invención reconoce la necesidad de un sistema AMT y ABS para vehículos, capaz de desacoplar selectivamente el motor de un vehículo con respecto a las ruedas del mismo, pero solamente en condiciones apropiadas.
RESUMEN DE LA INVENCIÓN
De acuerdo con la invención o invenciones que actualmente se dan a conocer, se minimizan los inconvenientes de la técnica anterior al proporcionar un sistema de control, preferentemente un sistema de control electrónico y un procedimiento de control, para sistemas de transmisión mecánica automática (AMT) y sistemas antibloqueo de frenos (ABS) , en los que el acoplamiento/desacoplamiento del motor del vehículo con respecto a las ruedas del mismo, se lleva a cabo de acuerdo con parámetros medidos y/o calculados incluyendo, sin que ello sea limitativo, señales de entrada indicativas de la velocidad de las ruedas, ángulo de inclinación del vehículo, funcionamiento de los frenos, velocidad del motor, velocidad del eje de entrada de la transmisión y velocidad del eje de salida de la transmisión. Otros parámetros de entrada/salida, tales como señales indicativas de las posiciones del acelerador o del freno, proporción de cambio de la posición del acelerador o posiciones de los frenos, situación del embrague principal, relación de velocidad acoplada en aquel momento, masa del vehículo, configuración de los ejes del vehículo (2x4, 2x6, etc.) , potencia de frenado del motor, y similares pueden ser utilizados también para tomar decisiones para controlar los sistemas AMT y/o ABS. El procedimiento prevé la detección del estado de bloqueo de una rueda, situación del vehículo en el momento del bloqueo de la rueda (masa del vehículo, inclinación y similares) , y control de la respuesta del AMT o ABS como respuesta a ello.
Lo anterior se consigue al dotar la unidad electrónica de control de medios de entrada para recibir una señal indicativa del bloqueo de las ruedas, por ejemplo, una señal desde el sistema antibloqueo de frenos del vehículo y programas lógicos para procesar las señales de entrada para determinar la presencia o ausencia de un estado de bloqueo de la rueda y el estado de funcionamiento del vehículo (masa del vehículo, inclinación y similares) . Al detectar el bloqueo de una rueda y la situación del vehículo, por ejemplo, en una rampa de descenso fuerte o una vía de circulación llana, el procedimiento de control provoca que el embrague del vehículo, u otro acoplamiento selectivamente desacoplable del sistema de impulsión permanezca acoplado, para impedir cualesquiera saltos indeseables hacia delante, o para su desacoplamiento para permitir que las ruedas giren a la velocidad del vehículo. Cuando se detecta que el bloqueo de una rueda es el resultado del freno motor del vehículo, por ejemplo, tal como puede ocurrir como resultado de condiciones de piso suelto o helado, el procedimiento de control puede provocar que el ABS controle o modifique el freno motor del vehículo. El procedimiento comprende, además, la detección de la terminación del bloqueo de las ruedas.
Por lo menos en una realización, la invención adopta la forma de un procedimiento de eliminación de los efectos de antibloqueo de un sistema de antibloqueo de frenos de un vehículo pesado, tal como un camión, que incluye una transmisión automática manual. El procedimiento incluye la detección de un evento de deslizamiento de la rueda, suficiente para iniciar un efecto antibloqueo del sistema de antibloqueo de frenos. Los técnicos en esta materia comprenderán que, entre los ejemplos de estos eventos se incluye el deslizamiento de una rueda sobre un pavimento deslizante o el deslizamiento sobre grava suelta, siendo ambos eventos normalmente detectados por los sistemas ABS. Se determina, entonces, si el vehículo pesado desciende o no por una pendiente con una inclinación que supere un valor... [Seguir leyendo]
Reivindicaciones:
1. En un vehículo que comprende un sistema de transmisión automático mecánico (10) y un sistema de antibloqueo de frenos (42) , un procedimiento para el desacoplamiento selectivo del sistema de impulsión con respecto a la rueda (60) del vehículo, que comprende:
detectar, como mínimo, un estado de funcionamiento del vehículo (110) ; detectar un estado del bloqueo de las ruedas del vehículo (105) ; comunicar la estado de funcionamiento y el estado de bloqueo de las ruedas del vehículo a una unidad de control lógico; y se caracteriza por desacoplar el sistema de impulsión con respecto a las ruedas del vehículo (60) cuando un primer estado de funcionamiento predeterminado del vehículo y un estado de bloqueo de las ruedas es comunicado por la unidad de control lógico (120) , y manteniendo el acoplamiento del sistema de impulsión y las ruedas (60) del vehículo cuando un segundo estado de funcionamiento predeterminado del vehículo y situación de bloqueo de las ruedas es comunicado por la unidad de control lógico (125) , correspondiendo dicho segundo estado de funcionamiento predeterminado a que el vehículo está descendiendo por una pendiente, que el vehículo está transportando una carga, que el vehículo tiene freno motor, y /o la configuración del vehículo.
2. Procedimiento, según la reivindicación 1, caracterizado porque el segundo estado de funcionamiento predeterminado del vehículo corresponde a un ángulo de inclinación del vehículo.
3. Procedimiento, según la reivindicación 2, caracterizado porque dicho ángulo de inclinación es superior que un ángulo predeterminado.
4. Procedimiento, según la reivindicación 3, caracterizado porque dicho ángulo predeterminado es de tres grados.
5. Procedimiento, según la reivindicación 3, caracterizado porque dicho ángulo predeterminado es de cinco grados.
6. Procedimiento, según la reivindicación 1, caracterizado porque el segundo estado de funcionamiento predeterminado del vehículo corresponde a un ángulo de inclinación del vehículo y a una velocidad del motor (12) del vehículo.
7. Procedimiento, según la reivindicación 6, caracterizado porque dicho ángulo de inclinación es superior a un ángulo predeterminado.
8. Procedimiento, según la reivindicación 6, caracterizado porque dicha velocidad del motor se encuentra por encima de un valor predeterminado.
9. Procedimiento, según la reivindicación 8, caracterizado porque dicho valor de velocidad predeterminado es la velocidad de paro del motor (12) .
10. Procedimiento, según la reivindicación 1, caracterizado porque el primer estado de funcionamiento predeterminado del vehículo corresponde al funcionamiento sobre terreno sustancialmente llano.
11. Procedimiento, según la reivindicación 1, caracterizado porque el estado de funcionamiento es determinado utilizando la masa del vehículo.
12. Procedimiento, según la reivindicación 1, caracterizado porque el estado de funcionamiento es determinado utilizando el ángulo de inclinación del vehículo.
13. Procedimiento, según la reivindicación 1, caracterizado porque el estado de funcionamiento es determinado utilizando el freno motor.
14. Procedimiento, según la reivindicación 1, caracterizado porque el estado de funcionamiento es determinado utilizando la configuración del vehículo.
15. Procedimiento, según la reivindicación 14, caracterizado porque la configuración del vehículo es el número de las ruedas motrices (60) en comparación con el número total de las ruedas.
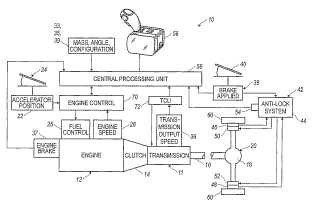
16. En un vehículo, que comprende un sistema de transmisión automático mecánico y un sistema de freno antibloqueo, un aparato para el desacoplamiento selectivo del sistema de accionamiento con respecto a las ruedas
(60) del vehículo, comprende:
un primer sensor (33, 35, 37, 39) para detectar, como mínimo, un estado de funcionamiento del vehículo; un segundo sensor (54) para detectar una situación de bloqueo de las ruedas del vehículo; y una unidad de control lógico (56, 70, 72) ; caracterizados porque la unidad de control lógico (56, 70, 72) que recibe señales del primer sensor (33, 35, 37, 39) y segundo sensor (54) y que está dispuesta operativamente para dirigir el desacoplamiento del sistema de accionamiento con respecto a las ruedas (60) , cuando el, como mínimo, primer sensor (33, 35, 37, 39) detecta un primer estado de funcionamiento predeterminado del vehículo y el segundo sensor (54) detecta un estado de bloqueo de las ruedas, estando dispuesta operativamente la unidad de control lógico (56, 70, 72) para mantener el acoplamiento del sistema de impulsión y las ruedas (60) cuando se detecta un segundo estado de funcionamiento predeterminado del vehículo y estado de bloqueo de las ruedas, cuyo segundo estado de funcionamiento predeterminado corresponde a que el vehículo está descendiendo una pendiente, a que el vehículo está transportando una carga, a que el vehículo tiene freno motor, y/o de la configuración del vehículo.
17. Aparato, según la reivindicación 16, porque el segundo estado de funcionamiento predeterminado del vehículo corresponde a un ángulo de inclinación del vehículo.
Patentes similares o relacionadas:
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de control de frenado de un vehículo y método de control de frenado para el mismo, del 23 de Noviembre de 2018, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control de frenado de un vehículo que lleva a cabo frenado por fricción, mediante un dispositivo de frenado por fricción, y frenado regenerativo, […]
Prueba de una función de control de la trayectoria de un vehículo con los frenos sin mando del volante, del 10 de Octubre de 2018, de PSA Automobiles SA: Procedimiento de prueba de una función de control de la trayectoria de un vehículo automóvil en ausencia de mando de la dirección de este vehículo, que utiliza un sistema […]
Procedimiento de control de la trayectoria de un vehículo con los frenos sin mando del volante de dirección, del 10 de Octubre de 2018, de PSA Automobiles SA: Procedimiento de control de la trayectoria de un vehículo automóvil en ausencia de mando del volante de dirección , que utiliza un sistema de […]
Sistema de control de conducción de seguridad y rescate para el cambio de radio de ruedas y el estallido de neumáticos en alta velocidad, del 11 de Octubre de 2017, de Wang, Dehong: Un sistema de control de conducción de seguridad y rescate para el cambio de radio de la rueda y el estallido de neumáticos en alta velocidad, que incluye: un […]
Control de vehículo por modulación de la inclinación, del 22 de Febrero de 2017, de DEKA PRODUCTS LIMITED PARTNERSHIP: Un método para la estabilización delantera-trasera de un vehículo para el movimiento en una dirección especificada sobre una superficie subyacente, el vehículo […]
Instalación de frenado electrohidráulica de vehículo y procedimiento para el manejo de la misma, del 4 de Enero de 2017, de LUCAS AUTOMOTIVE GMBH: Instalación de frenado electrohidráulica de vehículo de motor , comprendiendo un cilindro principal ; un actuador electromecánico para el accionamiento […]
Vehículo de motor y procedimiento para el control de un vehículo de motor, del 29 de Junio de 2016, de AUDI AG: Vehículo de motor que comprende al menos un sistema de asistencia al conductor para el cálculo previo de futuras situaciones de conducción […]