SENSOR TÁCTIL DE TRES EJES.
La presente invención se relaciona con un sensor táctil de tres ejes que comprende un cuerpo elástico en el interior del cual se ubica un imán permanente,
estando dicho cuerpo elástico colocado sobre un soporte rígido, y tres sensores de efecto Hall ubicados por debajo de dicho soporte rígido y colocados de manera que se encuentran dentro de la proyección del área del imán formando un triángulo alrededor del eje perpendicular de dicho imán, de manera que cuando se aplica una fuerza sobre el cuerpo elástico se produce un desplazamiento del imán provocando un campo magnético que es detectado por los sensores de efecto Hall, siendo dicho campo magnético indicativo de la magnitud y dirección del desplazamiento.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200901904.
Solicitante: UNIVERSIDAD CARLOS III DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: MARTINEZ DE LA CASA DIAZ,SANTIAGO, JARDON HUETE,ALBERTO, BALAGUER BERNALDO DE QUIROS,CARLOS, PEREZ MARTINEZ,CARLOS, MARTIN DELGADO,RAUL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01L5/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 5/00 Aparatos o métodos para la medida de fuerzas, del trabajo, de la potencia mecánica o del par, especialmente adaptados a fines específicos. › para la medida de varios componentes de la fuerza.
- G01L5/22 G01L 5/00 […] › para la medida de la fuerza aplicada a los órganos de control, p. ej. órganos de control de vehículos, gatillos.
PDF original: ES-2358655_A1.pdf
Fragmento de la descripción:
Sensor táctil de tres ejes.
Campo de la invención
La presente invención se enmarca dentro del campo de la robótica y, en particular, se refiere a sensores táctiles de tres ejes capaces de medir las deformaciones en objetos causadas por las fuerzas que actúan sobre el pie de un robot humanoide.
Antecedentes
Los robots, tanto los denominados industriales como los robots humanoides, necesitan conocer información de sí mismos y del entorno que les rodea. En este sentido, los sensores propioceptivos son aquellos que permiten la medición del estado interno del robot, posición angular de cada uno de los grados de libertad, carga de las baterías, etc. Por su parte, los sensores exteroceptivos se emplean para la percepción y medida de aspectos externos al robot, como por ejemplo, la temperatura, presión y localización de objetos.
Un aspecto muy importante es la medición de fuerzas que actúan sobre la suela del pie del robot humanoide. Para ello, y dentro del área de los sensores exteroceptivos, se han ido desarrollando diversos sensores táctiles que permiten medir las deformaciones causadas en los objetos como consecuencia de las mencionadas fuerzas. Según su comportamiento físico, estos sensores táctiles artificiales se clasifican en sensores piezoeléctricos, sensores capacitivos, sensores resistivos, sensores de celda de carga, galgas extensiométricas, sensores de efecto magnético, acelerómetros, sensores biopotenciales, sensores basados en análisis de color, etc.
No obstante, las principales limitaciones que presentan estos sensores es que algunos sólo miden las fuerzas perpendiculares a la superficie en la que se encuentran y otros, aunque sí son capaces de medir fuerzas en los tres ejes, no soportan las fuerzas a las que se ve sometida la suela del pie de un robot humanoide.
Así, se han desarrollado varios sensores de tres ejes para intentar detectar el desplazamiento o medir la fuerza en los tres ejes. Kobayashi et al. [IEICE Transactions on Electronics, 1991, J74-C-II, 5, 427-433] desarrollaron un prototipo de sensor táctil de tres ejes utilizando un array bidimensional de estructuras de silicona con celdas de carga fijas. No obstante, la fabricación de este tipo de sensores, además de ser laboriosa, es excesivamente cara. Ohka et al. [Advances Information Storage Systems, 1999, 10, 313-325] propusieron un método que medía un vector de fuerza utilizando la variación del índice de refracción en una guía de ondas óptica con forma de yema de dedo. La aplicación de este sensor táctil en el dedo de un robot es bastante sencilla pero el sistema sensor requiere adicionalmente un dispositivo de imagen. Shinoda et al. [In Proc. of the 11th International Conference on Solid-State Sensors and Actuators, 2001, 2, 1430-1433] propusieron un elemento sensor táctil de tres ejes basado en una cavidad ultrasónica y comprobaban la capacidad para detectar el coeficiente de fricción mediante la medida de la frecuencia resonante de la cavidad. Sin embargo, este sensor permitía medir el coeficiente de fricción sólo en el momento del contacto, y además se hacía difícil reducir el tamaño del elemento sensor.
El desplazamiento sobre el suelo puede medirse utilizando dispositivos piezoeléctricos. Así, Son et al. [In Proc. of the 1994 IEEE International Conference on Robotics and Automation, 1994, 471-476] desarrollaron un sensor táctil con tiras de film piezoeléctrico para detectar el desplazamiento incipiente y el de contacto. Sin embargo, el vector fuerza no era capaz de medirlo adecuadamente. Jockusch et al. [In Proc. of the 1997 IEEE International Conference on Robotics and Automation, 1997, 3080-3086] prototiparon un sensor táctil utilizando también un dispositivo piezoresistivo y un dispositivo piezoeléctrico colocados en capas para realizar la medida simultánea de la fuerza de contacto y la posición y detectar el desplazamiento, no obstante, este sensor híbrido resultaba excesivamente complicado y su estructura periférica muy voluminosa.
Recientemente, Takenawa [Proc. of the 2009 IEEE International Conference on Mechtronics, 2009] ha desarrollado un sensor táctil para la medida de fuerzas en tres direcciones basado en el campo magnético. Dicho sensor está basado en la inducción electromagnética y su estructura consiste en un cuerpo elástico que contiene un imán permanente ubicado sobre un sustrato rígido y cuatro bovinas encapsuladas. La tensión es generada por cada bobina en respuesta a la aplicación de un vector fuerza que deforma el cuerpo elástico y produce un desplazamiento en el imán. No obstante, la principal desventaja que presenta este sensor es que depende de la variación del campo magnético, por lo que, para conseguir una señal o una tensión adecuada cuando la variación del campo es pequeña se necesita aumentar el tamaño de las bobinas o el número de espirales que las constituyen, lo que condiciona enormemente el tamaño final del sensor.
A la vista de los inconvenientes que presentan los sensores propuestos hasta la fecha, se hace necesario el desarrollo de sensores táctiles de tres ejes que permitan medir la fuerza en tres direcciones adecuadamente y con un tamaño más reducido para una mejor implementación en la estructura de un robot.
Breve descripción de la invención
Los autores de la presente invención han observado que la sustitución de cuatro bobinas encapsuladas, como las empleadas en el sensor de Takenawa, por tres sensores de efecto Hall permite no sólo efectuar una medida adecuada de la fuerza en tres direcciones, sino además reducir en gran medida las dimensiones finales del sensor táctil. Esto se debe fundamentalmente a que, a diferencia de las mencionadas bobinas, la tensión generada en los sensores de tipo Hall depende del valor del campo magnético y no de su variación, por lo que no se requiere que dichos sensores o celdas sensores tengan un mayor tamaño cuando las variaciones de dicho campo son reducidas. Además, mediante el sensor táctil de la invención se reduce a tres el número de celdas sensores y dado que éstas se ubican dentro de la proyección del área del imán, con esta disposición se consigue ocupar el mínimo espacio y con ello obtener una mayor densidad de sensores. Una ventaja adicional que presenta el sensor de la invención es ser un sensor estático, es decir, no necesita una variación de la posición del imán para medir una fuerza, lo que permite por ejemplo la medida de fuerzas constantes. Asimismo, el algoritmo de medida se basa en una tabla precalculada que realiza operaciones simples, lo que conlleva un menor coste computacional.
Así, en un primer aspecto la presente invención se relaciona con un sensor táctil de tres ejes que comprende:
de manera que cuando se aplica una fuerza sobre el cuerpo elástico se produce un desplazamiento del imán provocando un campo magnético que es detectado por los sensores de efecto Hall, siendo dicho campo magnético indicativo de la magnitud y dirección del desplazamiento.
En un segundo aspecto, la invención se dirige a un sistema robótico que comprende un sensor táctil como se ha definido previamente.
Breve descripción de las figuras
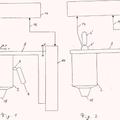
Figura 1: Distribución física de los elementos que constituyen el sensor táctil de tres ejes.
Figura 2: Representación de la evolución del error: (a) representación del error en la medida; b) evolución del error en la medida con respecto a la distancia al plano del imán para un punto concreto.
Figura 3: Evolución del campo magnético con la distancia al eje del imán para distintas distancias al plano del imán: (a) para todo el espacio representado y (b) en la zona cercana al imán.
... [Seguir leyendo]
Reivindicaciones:
1. Un sensor táctil de tres ejes que comprende:
de manera que cuando se aplica una fuerza sobre el cuerpo elástico se produce un desplazamiento del imán provocando un campo magnético que es detectado por los sensores de efecto Hall, siendo dicho campo magnético indicativo de la magnitud y dirección del desplazamiento.
2. Sensor táctil según reivindicación 1, en el que los tres sensores de efecto Hall se disponen formando un triángulo equilátero cuyo circuncentro coincide con el eje del imán.
3. Sensor táctil según reivindicaciones 1 ó 2, donde la distancia mínima entre cada uno de los sensores y el eje del imán es de al menos el 7% del radio del imán.
4. Sensor táctil según cualquiera de las reivindicaciones 1 a 3, donde la distancia máxima entre cada uno de los sensores y el eje del imán coincide con el radio del imán.
5. Sensor táctil según cualquiera de las reivindicaciones 1 a 4, donde la distancia mínima entre cada uno de los sensores y el plano del imán está comprendida entre 3 y 5 mm.
6. Sensor táctil según cualquiera de las reivindicaciones 1 a 4, donde los sensores de efecto Hall son sensores no programables con salida analógica.
7. Sensor táctil según cualquiera de las reivindicaciones 1 a 5, en el que el imán es un imán de ferrita.
8. Un sistema robótico que comprende un sensor táctil de tres ejes como se define en cualquiera de las reivindicaciones 1 a 7.
9. Sistema robótico según reivindicación 8 que es un robot humanoide.
10. Sistema robótico según reivindicación 9, donde el sensor táctil de tres ejes se ubica en el pie del robot humanoide.
Patentes similares o relacionadas:
Pedal, del 23 de Abril de 2019, de FERNSTEUERGERATE KURT OELSCH GMBH: Pedal para el accionamiento de una máquina de trabajo o de un vehículo industrial, que contiene a) un dispositivo de montaje, en el […]
Disposición de sensor para un árbol giratorio, del 26 de Octubre de 2018, de THYSSENKRUPP PRESTA AG: Disposición de sensor con un transmisor fijado de modo resistente al giro sobre un árbol que puede girar alrededor de un eje longitudinal, presentando el […]
Disposición para averiguar una fuerza que actúa sobre un timón, del 6 de Diciembre de 2017, de Becker Marine Systems GmbH: Sistema de posicionamiento dinámico para el posicionamiento automático de un vehículo acuático, en particular un barco, con un timón […]
Sensor táctil de puntos múltiples con matriz activa, del 19 de Abril de 2017, de Buyuksahin, Utku: Módulo de detección táctil de múltiples puntos de alta sensibilidad para robots y dispositivos que comprende un material elástico que está […]
Instrumento para cirugía robótica, del 18 de Mayo de 2016, de Surgica Robotica S.p.A: Un instrumento para cirugía robótica diseñado para montarse en el extremo distal de un brazo operativo de un aparato para cirugía robótica, comprendiendo el instrumento […]
 Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]
Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]
 Dispositivo actuador con sensor de fuerza, del 6 de Enero de 2016, de Stähle, Kurt: Dispositivo actuador para el accionamiento de al menos un pedal de un vehículo de motor, con al menos un elemento de accionamiento […]
Dispositivo actuador con sensor de fuerza, del 6 de Enero de 2016, de Stähle, Kurt: Dispositivo actuador para el accionamiento de al menos un pedal de un vehículo de motor, con al menos un elemento de accionamiento […]
 Dispositivo de dirección asistida eléctrica, del 30 de Diciembre de 2015, de KYB Corporation: Dispositivo de dirección asistida eléctrica que está configurado para asistir una fuerza de dirección aplicada a un volante por un conductor […]
Dispositivo de dirección asistida eléctrica, del 30 de Diciembre de 2015, de KYB Corporation: Dispositivo de dirección asistida eléctrica que está configurado para asistir una fuerza de dirección aplicada a un volante por un conductor […]