ROBOT DE ESTRUCTURA CINEMÁTICA HÍBRIDA PARA EL GUIADO DE LA INSERCIÓN DE AGUJAS, CATÉTERES Y ELEMENTOS QUIRÚRGICOS PARA PROCEDIMIENTOS DE CIRUGÍA MÍNIMAMENTE INVASIVA.
Robot de estructura cinemática híbrida para el guiado de la inserción de agujas,
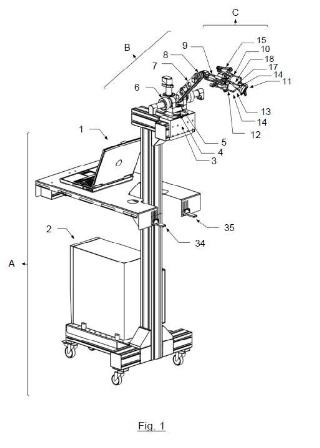
catéteres y elementos quirúrgicos para procedimientos de cirugía mínimamente invasiva, comprendiendo:
- un mecanismo paralelo esférico de orientación (C) con:
- elemento base (10);
- elemento móvil (11) con sistema láser (37) de guiado y unidad inercial (30) para calibración;
- articulación esférica (17);
- dispositivo de acople (31) del instrumental quirúrgico (32);
- mecanismo serial de posicionamiento (B) acoplado con el elemento base (10), con eslabones (5, 7, 9) en serie unidos mediante articulaciones rotativas (4, 6, 8) accionadas por actuadores (23a, 23b, 23c) para posicionar en el espacio, según tres grados de libertad, la articulación esférica (17) del mecanismo de orientación (C);
- base (3), acoplada al mecanismo de posicionamiento (B), para anclar al robot sobre un soporte móvil (A);
- soporte móvil (A) con sistema de fijación (D) para el acople a la camilla de operaciones (50).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201132056.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: ARACIL SANTONJA, RAFAEL, SALTAREN PAZMIÑO,Roque Jacinto, PUGLISI,Lisandro José, POLETTI,Gabriel Armando, REY PORTOLES,Germán, CABRERA PARRA,Walter.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
Fragmento de la descripción:
Robot de estructura cinemática híbrida para el guiado de la inserción de agujas, catéteres y elementos quirúrgicos para procedimientos de cirugía mínimamente invasiva
Campo de la invención
La presente invención se engloba en el ámbito de los dispositivos robóticos médicos que permiten asistir, y/o realizar procedimientos de cirugía mínimamente invasiva, que permitan posicionar y/o orientar instrumental quirúrgico de manera exacta y repetitiva. En particular, a aquellos dispositivos robóticos que permitan realizar procedimientos de guiado e inserción de agujas y/o catéteres y/o instrumental en pacientes para la toma de muestra de tejidos y/o fluidos intra-corporales para biopsia y diagnosis, inserción y deposición de marcadores fiduciales, administración localizada de medicamentos específicos, de manera precisa y controlada, a partir de una pre-planificación basada en el análisis de imágenes médicas previamente capturadas.
Antecedentes de la invención
La presente invención de robot de estructura cinemática híbrida para el guiado e inserción de agujas y catéteres para procedimientos de cirugía mínimamente invasiva, tiene como objetivo dar una solución a la necesidad de realizar los procedimientos de inserción de agujas y/o cánulas y/o catéter de manera exacta, repetitiva, planificada y controlada.
La medicina contemporánea se inclina hacia el empleo de terapias menos invasivas y más localizada, denominadas cirugías mínimamente invasivas. Uno de los procedimientos que pertenecen a este sector que más se lleva a cabo dentro del ámbito quirúrgico, es la inserción percutánea de agujas y catéteres para la toma de muestra tisular o administración de medicamentos específicos. Las intervenciones mediante la inserción de agujas ofrecen varias ventajas sobre la cirugía tradicional, como ser heridas más pequeñas y por consiguiente menor tiempo de recuperación, menor dosis de anestesia, menor trauma post-operativo, y menor riesgo de complicaciones, entre otras.
Actualmente el procedimiento convencional de inserción de agujas se realiza de manera manual sin referencia exacta del punto de inserción y de la orientación del instrumental. Esto se debe a que el proceso de planificación se basa en el reconocimiento e identificación de marcadores que se colocan sobre el paciente durante la sesión de toma de imágenes médicas. Además durante el proceso de inserción la orientación del instrumental se corrige únicamente con la correlación de las imágenes que se tienen del paciente, la realimentación kinostática del especialista y la reconstrucción mental del especialista de la anatomía del paciente. Esta metodología carece de exactitud, siendo frecuente la inserción errónea del instrumental lo cual infiere en una nueva punción, y en casos más graves, en severas hemorragias internas.
El desarrollo de robots quirúrgicos está principalmente motivado por la necesidad de mejorar la efectividad de los procedimientos quirúrgicos. Las tecnologías basadas en la automatización y robótica permiten mejorar la efectividad de los mismos, al poder integrar varias fuentes de información como los son las imágenes médicas y su procesamiento, y realizar tareas complejas en tiempo real.
En particular, existe documentación que certifica que el procedimiento de guiado e inserción de instrumental llevado a cabo mediante la asistencia de un dispositivo robótico supera a la técnica tradicional.
Tal es el caso del sistema robótico tele-operado Da Vinci de Intuitive Surgical Inc., el cual es hoy en día el robot más empleado en salas de cirugía mínimamente invasiva, principalmente debido a su gran versatilidad y escasez de propuestas comerciales en el mercado, lo cual eleva su coste y limita su empleo a pocas salas de cirugía.
Sin embargo, el robot Da Vinci no fue diseñado para realizar tareas de guiado e inserción de agujas, catéteres y elementos quirúrgicos, por lo que su versatilidad supera las necesidades operarias de dicho procedimiento. Es decir, el robot Da-Vinci es un sistema de alta complejidad compuesto por tres o cuatros brazos de siete grados de libertad, cuando para llevar a cabo un procedimiento de guiado se requieren de tres grados de libertad para posicionar el instrumental y dos grados más para orientarlo, y en caso de realizar un inserción automatizada se requiere uno o dos grados adicionales. Por lo tanto, la capacidad de movimientos del robot supera ampliamente los requisitos de la tarea de guiado e inserción. Por otro lado, dicha versatilidad del robot requiere que el operario dedique muchas horas de capacitación y entrenamiento con el dispositivo.
Es por ello que el diseño y desarrollo de un dispositivo robótico diseñado especialmente para las tareas de guiado e inserción de agujas, catéteres y elementos quirúrgicos, permitiría proponer una alternativa específica para la tarea, de menor coste y de menor tiempo de aprendizaje por parte del operario.
La presente invención emplea una estructura cinemática híbrida de seis grados de libertad, la cual aprovecha las cualidades mecánicas de los mecanismos seriales y los mecanismos paralelos, diseñada especialmente para realizar las tareas de guiado e inserción. Además, presenta un sistema compuesto por láseres y unidades inerciales que permiten calibrar y corregir la posición y orientación del instrumental quirúrgico. Dicho instrumental se acopla al extremo distal del mecanismo mediante un dispositivo de acople que le permite al instrumental desacoplarse, dependiendo si la tarea de inserción será realizada por el robot de manera automatizada (activa) , o será realizada por el especialista de manera manual guiada por el robot (pasiva) .
Descripción de la invención
La presente invención se refiere a un dispositivo robótico de estructura cinemática híbrida para el guiado de la inserción de agujas, catéteres y elementos quirúrgicos para procedimientos de cirugía mínimamente invasiva. Está aplicado a los procedimientos de cirugía mínimamente invasiva robótica que permite guiar e insertar agujas y/o catéteres y/o instrumental de medición de manera exacta, repetitiva y controlada, para la toma de muestras de tejidos y/o fluidos intra-corporales para biopsia y diagnosis, inserción y deposición de marcadores fiduciales, administración localizada de medicamentos específicos, de manera precisa y controlada, a partir de una pre-planificación basada en el análisis de imágenes médicas previamente capturadas mediante algún sistema de imágenes como ser tomografía computada, resonancia magnética, ultrasonido, etc.
La invención del robot de estructura cinemática híbrida para el guiado de la inserción de agujas, catéteres y elementos quirúrgicos para procedimientos de cirugía mínimamente invasiva, permite realizar procedimientos de guiado e inserción de agujas para la toma de muestra tisular, inserción de marcadores fiduciales de manera precisa, controlada y segura. Permitiendo que el proceso de inserción se realice de manera manual y guiada por el robot, o de manera automatizada.
Para que un dispositivo robótico pueda realizar un procedimiento de guiado e inserción de agujas en un procedimiento de cirugía mínimamente invasivo, el dispositivo requiere de al menos 5 grados de libertad. Sin embargo, la presente invención presenta un mecanismo de 6 grados de libertad que no solo permite alcanzar el objetivo sino que le otorga al operador la posibilidad de seleccionar la configuración que mejor se adecue a las necesidades de la tarea y preferencias del especialista.
El dispositivo robótico de seis grados de libertad está basado en una estructura cinemática híbrida. Dicha topología híbrida del dispositivo, serial y paralelo, aprovecha las virtudes de cada una de ellas. Es decir, se emplea una cadena cinemática serial para cubrir un mayor volumen de trabajo y se emplea una cadena cinemática paralela para obtener un dispositivo de orientación rígido con dimensiones y peso reducido.
Los primeros tres grados de libertad están formadas por tres eslabones seriales unidos entre sí por articulaciones rotativas y los tres últimos grados de libertad lo forman un mecanismo paralelo del tipo esférico que lleva adosado un elemento móvil para portar instrumental quirúrgico y de guiado espacial.
El robot de estructura cinemática híbrida en su conjunto es un sistema conformado por partes estructurales mecánicas, articulaciones mecánicas, servo...
Reivindicaciones:
1. Robot de estructura cinemática híbrida para el guiado de la inserción de agujas, catéteres y elementos quirúrgicos para procedimientos de cirugía mínimamente invasiva, caracterizado por que comprende:
- un mecanismo paralelo esférico de orientación (C) que incorpora:
• un elemento base (10) ;
• un elemento móvil (11) , con un sistema láser (37) para el guiado y una unidad inercial (30) para calibración;
• una articulacion esferica (17) cuyo centro de rotación se corresponde con la muñeca del robot;
• un dispositivo de acople (31) para permitir el acople y desacople del instrumental quirúrgico (32) ;
estando dicho mecanismo de orientación (C) encargado de orientar al elemento móvil (11) con respecto al elemento base (10) en el espacio segun tres grados de libertad;
- un mecanismo serial de posicionamiento (B) acoplado con el elemento base (10) del mecanismo de orientación (C) , estando formado por una pluralidad de eslabones (5, 7, 9) en serie unidos entre sí mediante articulaciones rotativas (4, 6, 8) accionadas por actuadores (23a, 23b, 23c) para posicionar en el espacio, según tres grados de libertad, la articulación esférica (17) del mecanismo de orientacion (C) ;
- una base (3) , acoplada al mecanismo serial de posicionamiento (B) , que permite anclar al robot sobre un soporte movil (A) ;
- un soporte móvil (A) , sobre el cual se ancla la base (3) del robot, y que dispone de un sistema de fijación (D) que permite acoplar el soporte móvil (A) a la camilla de operaciones (50) .
2- Robot de estructura cinemática híbrida según la reivindicación 1, caracterizado por que el elemento base (10) y el elemento móvil (11) del mecanismo de orientación (C) están unidos entre sí mediante:
- una pluralidad de piernas móviles formadas por una primera barra (12) y una segunda barra (13) articuladas entre sí mediante una articulación esférica (14) , estando los extremos de cada pierna vinculada al elemento móvil (11) mediante una articulación esférica (16) y al elemento base (10) mediante una articulación prismatica (15) actuada mediante un actuador (26) ;
- una pierna fija (18) que vincula a ambos discos (10, 11) mediante una articulación esférica (17) cuyo centro de rotación se corresponde con la muñeca del robot.
3. Robot de estructura cinemática híbrida según la reivindicación anterior, caracterizado por que el mecanismo de orientación (C) dispone de tres accionamientos lineales de tipo biela-manivela (27, 28) accionados cada uno por un motor (26) , estando cada biela (28) articulada mediante una junta (29) con la primera barra (12) de cada pierna móvil configurada para deslizar linealmente sobre una guía (25) para conseguir así un movimiento lineal.
4. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones anteriores, caracterizado por que el mecanismo serial de posicionamiento (B) comprende un primer (5) , un segundo (7) y un tercer (9) eslabón y un primer (23a) , un segundo (23b) y un tercer (23c) motor, estando el primer eslabón
(5) acoplado a la base (3) del robot y los motores (23a, 23b, 23c) acoplados al primer eslabón (5) .
5. Robot de estructura cinemática híbrida según la reivindicación 4, caracterizado por que el primer eslabón (5) es accionado por el primer motor (23a) acoplado a un primer eje (19a) que está apoyado en unos rodamientos (22a) y en su extremo está una primera polea dentada (20a) que transmite la rotación mediante una primera correa dentada (21a) a una segunda polea (20b) que está adosado a un segundo eje (19e) sobre el cual se produce el movimiento del eslabón (5) .
6. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones 4 a 5, caracterizado por que el segundo eslabón (7) es accionado por el segundo motor (23b) acoplado a un tercer eje (19b) que está apoyado en rodamientos (22c) y que en su extremo está atornillado a dicho segundo eslabón (7) .
7. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones 4 a 6, caracterizado por que el tercer eslabón (9) es accionado por un tercer motor (23c) acoplado a un cuarto eje (19c) , el cual mediante una tercera (20c) y cuarta (20d) poleas y una segunda correa dentada (21b) que se acopla a un quinto eje (19d) adosado al tercer eslabón (9) y que está apoyado en rodamientos (22g, 22h, 22i) , transmite el par de rotación del tercer motor (23c) al tercer eslabón (9) .
8. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones anteriores, caracterizado por que el mecanismo serial de posicionamiento (B) está acoplado en su extremo distal (24) con el elemento base (10) del mecanismo de orientación (C) .
9. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende un sistema de control (1, 2) encargado de controlar los movimientos de las partes móviles del robot.
10. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende un sistema de fijación (D) a la mesa de operación que dispone de unas guías de inserción (36) que se fija a la mesa de operación.
11. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones anteriores, caracterizado por que el dispositivo de acople (31) del instrumental quirúrgico (32) es acoplable al elemento móvil (11) del mecanismo de orientación (C) , disponiendo dicho dispositivo de acople (31) de una unidad inercial (38) para obtener el ángulo del instrumental quirúrgico (32) una vez que el instrumental quirúrgico (32) se haya desacoplado del elemento móvil del mecanismo de orientación.
12. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones anteriores, caracterizado por que dispone de un dispositivo de medición láser (33) ubicado sobre la base del robot (3) y encargado de medir la posición del elemento móvil (11) del dispositivo de orientación (C) , cuando se le indica al mecanismo híbrido que alcance a unos marcadores predefinidos sobre la camilla de operaciones (50) .
13. Robot de estructura cinemática híbrida según cualquiera de las reivindicaciones anteriores, caracterizado por que el sistema láser (37) del elemento móvil (11) comprende una pluralidad de punteros láser (37a, 37b, 27c) dispuestos en forma de abanico que sirve de guía para señalar el punto de inserción del dispositivo quirúrgico (32) sobre el paciente.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]