Reductor de velocidad y dispositivo de generación de energía fotovoltaica solar de tipo rastreo.
Una transmisión (10) de engranajes de reducción que comprende;
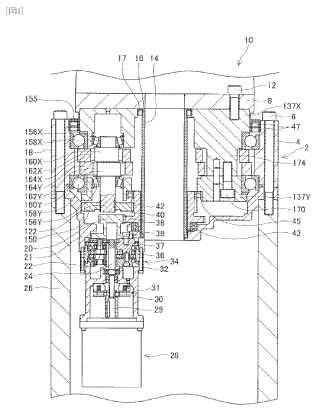
una primera unidad (34) de engranajes de reducción que tiene un primer arbol (24) de entrada que gira de acuerdo con la rotación de un arbol (29) de salida de un motor (28), un primer engranaje externo (64X, 64Y) que gira orbitalmente alrededor de una linea axial del primer arbol (24) de entrada de acuerdo con la rotación del primer arbol (24) de entrada, un primer engranaje interno (36) que engrana con el primer engranaje externo (64X, 64Y) y que tiene un numero de dientes diferente que el numero de dientes del primer engranaje externo (64X, 64Y) y un primer arbol (20) de salida que gira alrededor de la linea axial del primer engranaje interno (36);
una segunda unidad (2) de engranajes de reducción que tiene un cigüenal (122) que esta fijado a un engranaje (150) de entrada, una leva excentrica (160X, 160Y) que gira orbitalmente alrededor de la linea axial del cigüenal (122) de acuerdo con la rotación del cigüenal (122), un segundo engranaje externo (164X, 164Y) que engrana con la leva excentrica (160X, 160Y) y que tiene un agujero pasante en el centro del segundo engranaje externo (164X, 164Y), una pieza cilindrica (16) que esta dispuesta en una parte central de la segunda unidad 2 de engranajes de reducción y pasa a traves del agujero pasante del segundo engranaje externo (164X, 164Y), un segundo engranaje interno (4) que engrana con el segundo engranaje externo (164X, 164Y) y que tiene un numero de dientes diferente que el numero de dientes del segundo engranaje externo (164X, 164Y) y un segundo arbol de salida (137X, 137Y) que gira alrededor de la linea axial del segundo engranaje interno (4);
y un arbol intermedio (40) que esta formado con un agujero pasante y engrana con el engranaje (150) de entrada y el primer arbol (20) de salida,
en el que el arbol intermedio (40) gira alrededor de la linea axial del segundo engranaje interno (4) de acuerdo con la rotación del primer arbol (20) de salida, el cigüenal (122) de la segunda unidad (2) de engranajes de reducción gira de acuerdo con la rotación del arbol intermedio (40) y la pieza cilindrica (16) pasa a traves del agujero pasante del arbol intermedio (40),
y la primera unidad (34) de engranaje de reducción esta situada entre un plano de extensión que continua desde una superficie circunferencial exterior (18) de la segunda unidad (2) de engranajes de reducción y un plano de extensión que continua desde la superficie circunferencial interior (14) de la pieza cilíndrica (16) .
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2008/052157.
Solicitante: NABTESCO CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 9-18 KAIGAN 1-CHOME MINATO-KU TOKYO 105-0022 JAPON.
Inventor/es: MIYOSHI,Hiroyuki, WANG,Hongyou, ASANO,Shigeki.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H1/32 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 1/00 Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00). › en los cuales el eje central de la transmisión está situado en el interior de la periferia de un engranaje orbital.
- F24J2/54
PDF original: ES-2377759_T3.pdf
Fragmento de la descripción:
Reductor de velocidad y dispositivo de generación de energia fotovoltaica solar de tipo rastreo Campo teenieo La presente invención se refiere a una transmisión de engranajes de reducción. En particular, la presente invención se refiere a una transmisión de engranajes de reducción que comprende una pluralidad de unidades de engranajes de reducción y es capaz de producir un par motor grande necesario, por ejemplo, para girar un panel solar o similar para rastrear el sol.
Teeniea anteeedente Es conocida en la tecnica una transmisión de engranajes de reducción que reduce la velocidad de rotación de un arbol de salida de un motor y produce la velocidad reducida de rotación. Para realizar una gran relación de reducción en esta transmisión de engranajes de reducción, es combinada una pluralidad de engranajes. Sin embargo, cuando demasiados engranajes son combinados, la transmisión de engranajes de reducción aumenta de tamano y la configuración de la transmisión de engranajes de reducción se hace mas compleja. Una gran relación de reducción puede ser realizada unificando las transmisiones de engranajes de reducción y conectando en serie las transmisiones unificadas de engranajes de reducción.
La Publicación de Solicitud de Patente Japonesa nO 2001-193801 expone una transmisión de engranajes de reducción que tiene una primera unidad de engranajes de reducción (un dispositivo de engranaje de primera etapa) y una segunda unidad de engranajes de reducción (un dispositivo de engranajes de segunda etapa) . La primera unidad de engranajes de reducción es un dispositivo de reducción de engranajes planetarios de engrane interior. El dispositivo de reducción de engranajes planetarios de engrane interior comprende un arbol de cuerpo excentrico, un engranaje externo y un engranaje interno. El arbol de cuerpo excentrico gira coaxialmente con un arbol de salida de un motor (un arbol de motor) y comprende una leva excentrica. El engranaje externo engrana con la leva excentrica. El engranaje interno permite que el engranaje externo gire excentricamente mientras mantiene un estado engranado con el engranaje externo. Ademas, el engranaje interno rodea al engranaje externo. El engranaje interno tiene un numero de dientes diferente que el numero de dientes del engranaje externo. El engranaje externo gira con respecto al engranaje interno mientras gira excentricamente alrededor de una linea axial del engranaje interno. En la presente memoria descriptiva, el fen6meno del engranaje externo girando excentricamente alrededor de la linea axial del engranaje interno es denominado tambien girar orbitalmente alrededor de la linea axial del engranaje interno. Ademas, el caso donde "el engranaje externo gira" se refiere al engranaje externo girando con respecto al engranaje interno. Un arbol de salida (un arbol de baja velocidad) esta acoplado con el engranaje externo. El par motor de la primera unidad de engranajes de reducción es transmitido a la segunda unidad de engranajes de reducción por via del arbol de salida. La segunda unidad de engranajes de reducción reduce la velocidad de una rotación introducida por via de dos arboles que estan dispuestos paralelos entre si. 0 sea, en la segunda unidad de engranajes de reducción, un arbol de salida que tiene un agujero pasante formado en su centro esta conectado a un arbol de entrada que gira integralmente con el arbol de salida de la primera unidad de engranajes de reducción mediante un pin6n helicoidal y un engranaje helicoidal, y el numero de rotaciones del arbol de salida de la segunda unidad de engranajes de reducción es reducido a menos que el numero de rotaciones del arbol de entrada de la segunda unidad de engranajes de reducción. En la tecnica de la Publicación de Solicitud de Patente Japonesa nO 2001193801, una gran relación de reducción es realizada conectando en serie la primera unidad de engranajes de reducción y la segunda unidad de engranajes de reducción. Un par motor grande puede ser obtenido realizando la relación grande de reducción.
Exposieian de la inveneian.
Problema a ser resuelto por la invención.
Por ejemplo, al girar un panel solar para rastrear el sol, un par motor extremadamente grande es necesario comparado con casos tales como girar las juntas de un robot o similares. 0 sea, es necesaria una relación de reducción extremadamente grande.
En el caso donde el par motor grande es realizado usando la tecnica de la Publicación de Solicitud de Patente Japonesa nO 2001-193801 antes citada, el diametro del engranaje helicoidal, unido al arbol de salida de la segunda unidad de engranajes de reducción, debe ser aumentado. Alternativamente, el numero de dientes del engranaje helicoidal debe ser incrementado. En cualquier caso, aumenta el diametro de la segunda unidad de engranajes de reducción.
Si dos dispositivos de reducción por engranajes planetarios de engrane interior, que utilizan la primera unidad de engranajes de reducción de la Publicación de Solicitud de Patente Japonesa nO 2001-193801 antes citada, estan preparados y estan conectados en serie, un par motor grande puede ser realizado sin aumentar el diametro de la segunda unidad de engranajes de reducción. Sin embargo, en este metodo, un agujero que pasa a traves de una parte central de la transmisión de engranajes de reducción no pude ser mantenido y tuberia, cableado, etc. ya no
puede ser pasado a traves de la transmisión de engranajes de reducción.
La presente invención pretende resolver el problema anterior. 0 sea, una transmisión de engranajes de reducción es expuesta en la reivindicación 1 que, cuando realiza un par motor grande combinando una pluralidad de unidades de reducción, no incrementa el diametro de la segunda unidad de engranajes de reducción y es capaz de mantener el agujero pasante en la parte central.
Medios para resolver el problema Una transmisión de engranajes de reducción de la presente invención comprende una primera unidad de engranajes de reducción y una segunda unidad de engranajes de reducción. La primera unidad de engranajes de reducción tiene un primer arbol de entrada que gira de acuerdo con la rotación de un arbol de salida de un motor, un primer engranaje externo que gira orbitalmente alrededor de la linea axial del primer arbol de entrada de acuerdo con la rotación del primer arbol de entrada, un engrane del primer engranaje interno con el primer engranaje externo y un primer arbol de salida que gira alrededor de una linea axial del primer engranaje interno. El primer engranaje interno tiene un numero de dientes diferente que el numero de dientes del primer engranaje externo.
La segunda unidad de engranajes de reducción tiene un cigOenal que gira de acuerdo con la rotación del primer arbol de salida, una leva excentrica que gira orbitalmente alrededor de una linea axial del cigOenal de acuerdo con la rotación del cigOenal, un segundo engranaje externo que engrana con la leva excentrica y tiene un agujero pasante en el centro de el mismo, una pieza cilindrica que pasa a traves del agujero pasante del segundo engranaje externo, un engrane del segundo engranaje interno con el segundo engranaje externo y un segundo arbol de salida que gira alrededor de una linea axial del segundo engranaje interno. El segundo engranaje interno tiene un numero de dientes diferente que el numero de dientes del segundo engranaje externo. Ademas, la primera unidad de engranajes de reducción esta situada entre un plano de extensión que continua desde una superficie circunferencial exterior de la segunda unidad de engranajes de reducción y un plano de extensión que continua desde una superficie circunferencial interior de la pieza cilindrica que pasa a traves del agujero pasante del segundo engranaje externo.
Segun la transmisión anterior de engranajes de reducción, desde una vista en planta a lo largo de la linea axial de la transmisión de engranajes de reducción, la primera unidad de engranajes de reducción no esta situada en el interior de la pieza cilindrica de la segunda unidad de engranajes de reducción. Desde la vista en planta a lo largo de la linea axial, la primera unidad de engranajes de reducción esta situada entre la superficie circunferencial exterior de la segunda unidad de engranajes de reducción y la superficie circunferencial interior de la pieza cilindrica. En esta transmisión de engranajes de reducción, tuberia, cableado, etc. puede ser pasado a traves del interior de la pieza cilindrica sin estorbar a la primera unidad de engranajes de reducción. Por tanto, es posible impedir que cableado, etc. resulte enredado durante el funcionamiento de la transmisión... [Seguir leyendo]
Reivindicaciones:
1. Una transmisión (10) de engranajes de reducción que comprendeº
una primera unidad (34) de engranajes de reducción que tiene un primer arbol (24) de entrada que gira de acuerdo con la rotación de un arbol (29) de salida de un motor (28) , un primer engranaje externo (64X, 64Y) que gira orbitalmente alrededor de una linea axial del primer arbol (24) de entrada de acuerdo con la rotación del primer arbol (24) de entrada, un primer engranaje interno (36) que engrana con el primer engranaje externo (64X, 64Y) y que tiene un numero de dientes diferente que el numero de dientes del primer engranaje externo (64X, 64Y) y un primer arbol (20) de salida que gira alrededor de la linea axial del primer engranaje interno (36) º
una segunda unidad (2) de engranajes de reducción que tiene un cigOenal (122) que esta fijado a un engranaje (150) de entrada, una leva excentrica (160X, 160Y) que gira orbitalmente alrededor de la linea axial del cigOenal (122) de acuerdo con la rotación del cigOenal (122) , un segundo engranaje externo (164X, 164Y) que engrana con la leva excentrica (160X, 160Y) y que tiene un agujero pasante en el centro del segundo engranaje externo (164X, 164Y) , una pieza cilindrica (16) que esta dispuesta en una parte central de la segunda unidad 2 de engranajes de reducción y pasa a traves del agujero pasante del segundo engranaje externo (164X, 164Y) , un segundo engranaje interno (4) que engrana con el segundo engranaje externo (164X, 164Y) y que tiene un numero de dientes diferente que el numero de dientes del segundo engranaje externo (164X, 164Y) y un segundo arbol de salida (137X, 137Y) que gira alrededor de la linea axial del segundo engranaje interno (4) º y un arbol intermedio (40) que esta formado con un agujero pasante y engrana con el engranaje (150) de entrada y el primer arbol (20) de salida, en el que el arbol intermedio (40) gira alrededor de la linea axial del segundo engranaje interno (4) de acuerdo con la rotación del primer arbol (20) de salida, el cigOenal (122) de la segunda unidad (2) de engranajes de reducción gira de acuerdo con la rotación del arbol intermedio (40) y la pieza cilindrica (16) pasa a traves del agujero pasante del arbol intermedio (40) , y la primera unidad (34) de engranaje de reducción esta situada entre un plano de extensión que continua desde una superficie circunferencial exterior (18) de la segunda unidad (2) de engranajes de reducción y un plano de extensión que continua desde la superficie circunferencial interior (14) de la pieza cilindrica (16) .
2. La transmisión (10) de engranajes de reducción segun la reivindicación 1, en la que la primera unidad (34) de engranajes de reducción tiene un primer cigOenal (22) que gira de acuerdo con la rotación del primer arbol (24) de entrada y una primera leva excentrica (60X, 60Y) que gira orbitalmente alrededor de la linea axial del primer cigOenal (22) de acuerdo con la rotación del primer cigOenal (22) , y el primer engranaje externo (64X, 64Y) engrana con la primera leva excentrica (60X, 60Y) .
3. La transmisión (10) de engranajes de reducción segun la reivindicación 2, en la que la linea axial del primer arbol (24) de entrada esta desplazada respecto a la linea axial del primer cigOenal (22) , y el primer cigOenal (22) gira orbitalmente alrededor de la linea axial del primer arbol (24) de entrada de acuerdo con la rotación del primer arbol (24) de entrada.
4. La transmisión (10) de engranajes de reducción segun la reivindicación 3, en la que
el cigOenal (122) de la segunda unidad (2) de engranajes de reducción gira orbitalmente alrededor de la linea axial del segundo engranaje interno (4) de acuerdo con la rotación del arbol intermedio (40) .
5. La transmisión (10) de engranajes de reducción segun una cualquiera de las reivindicaciones 1 a 4, en la que el primer arbol (20) de salida gira de acuerdo con la rotación del primer engranaje externo (64X, 64Y) , y
el segundo arbol (137X, 137Y) de salida gira de acuerdo con la rotación del segundo engranaje externo (164X, 164Y) .
6. Una unidad (300) de generación de energia fotovoltaica con rastreo solar que utiliza la transmisión (10) de engranajes de reducción en una cualquiera de las reivindicaciones 1 a 5,
comprendiendo la unidad (300) de generación de energia fotovoltaica con rastreo solarº
un panel (302) que es girado por la transmisión (10) de engranajes de reducción.
7. La unidad (300) de generación de energia fotovoltaica con rastreo solar segun la reivindicación 6, en la que la transmisión (10) de engranajes de reducción esta dispuesta dentro de una parte de fijación (26) de la unidad (300) de generación de energia fotovoltaica con rastreo solar, la linea axial del segundo arbol (137X, 137Y) de salida es identica que la linea axial de la parte de fijación (26) , y el panel (302) es girado alrededor de la linea axial de la parte de fijación (26) .
Patentes similares o relacionadas:
SISTEMA CONDENSADOR DE ENERGÍA SOLAR, CON LENTE LIQUIDA DEL TIPO CILÍNDRICA Y ABSORBENTE TIPO "CUERPO NEGRO", del 14 de Diciembre de 2017, de SANTANDER Y SANTANA, S.L: Un sistema condensador de energía solar formado por uno o varios equipos colectores destinados a la captación y absorción de la luz solar,previamente concentrada por refracción, […]
GENERADOR DE ENERGÍA TERMOSOLAR, del 27 de Octubre de 2017, de CALDERON RODRIGUEZ, MIGUEL: Generador de energía termosolar, que comprende dos discos parabólicos con espejos en una de sus caras que se disponen en una estructura de soporte […]
CONCENTRADOR DE SEGUIMIENTO SOLAR LINEAL A PUNTUAL Y MÉTODO, del 5 de Octubre de 2017, de INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY: Un concentrador de seguimiento solar linear a puntual (LTSC) que comprende un espejo PTC y un FL de dos secciones, ambos montados en un rastreador […]
Montaje de un receptor en un concentrador de energía solar, del 16 de Agosto de 2017, de Absolicon Solar Collector AB: Sistema de energía solar que comprende componentes ópticos de enfoque lineal y al menos un receptor, caracterizado porque comprende un dispositivo para ensamblar y […]
Sistema de conexión para una central termosolar, del 26 de Julio de 2017, de Senior Flexonics GmbH: Sistema de conexión para una central termosolar con un tubo conductor que puede pivotar alrededor de un eje de giro y que se encuentra rellenado con un fluido portador, […]
Seguidor de fuente luminosa, del 10 de Mayo de 2017, de MOSER, MARK K: Aparato para seguir una fuente luminosa (S), que comprende: una columna de soporte ; una plataforma montada de forma giratoria […]
Especificación de un dispositivo de soporte para paneles fotovoltaicos en sistemas de seguimiento fotovoltaico, del 12 de Abril de 2017, de Convert Tech S.r.l: Un dispositivo de soporte para paneles fotovoltaicos en sistemas de seguimiento fotovoltaico que comprende: · al menos un montante […]
MÉTODO DE CALIBRACIÓN PARA HELIOSTATOS, del 6 de Abril de 2017, de FUNDACION CENER-CIEMAT: Método de calibración para heliostatos que comprende llevar a cabo al menos una búsqueda para visualizar al menos una referencia por medio de un dispositivo de visión […]