Procedimiento para la reducción del radio de giro de vehículos industriales.
Procedimiento para la reducción del círculo de viraje de vehículos industriales con,
como mínimo, un eje delantero (VA1, VA2) y, como mínimo, dos ejes traseros (HA1, HA2, HA3), produciéndose un desplazamiento intencional de la carga de eje sobre el último eje trasero (HA3) a los ejes traseros anteriores (HA1, HA2) y produciéndose el desplazamiento de la carga de eje sólo hasta una sobrecarga límite sobre los ejes traseros anteriores, caracterizado porque la sobrecarga límite es de 130%, aproximadamente, siendo el último eje trasero (HA3) aligerado hasta que, al superar un vehículo con carga parcial la velocidad límite, se produzca sobre el primer y/o segundo eje trasero (HA1, HA2) una carga de 100% en cada uno.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09004824.
Solicitante: WABCO GMBH.
Nacionalidad solicitante: Alemania.
Dirección: AM LINDENER HAFEN 21 30453 HANNOVER ALEMANIA.
Inventor/es: STENDER, AXEL, RISSE,RAINER, GLAVINIC,ANDELKO, SCHOPPE,MICHAEL, SCHRADER,CHRISTIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60G17/015 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60G SUSPENSION DE VEHICULOS (vehículos de colchón de aire B60V; montajes entre el chasis y el cuerpo del vehículo B62D 24/00). › B60G 17/00 Suspensiones elásticas que permiten ajustar las características de los muelles o de los amortiguadores de vibraciones, regular la distancia entre la superficie portante y la parte suspendida del vehículo o bloquear la suspensión durante la utilización para adaptarse a las condiciones variables del vehículo o del terreno, p. ej. en función de la velocidad o de la carga. › comportando los medios de reglaje elementos eléctricos o electrónicos (B60G 17/005 tienen prioridad).
- B60G17/016 B60G 17/00 […] › caracterizadas por su respuesta, cuando el vehiculo está en movimiento, a un movimiento o a una condición dada o a la acción del conductor.
- B60G99/00 B60G […] › Materia no prevista en otros grupos de esta subclase.
- B62D53/06 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 53/00 Combinaciones tractor-remolque; Trenes de carretera (dispositivos de acoplado diferentes de los acoplamientos con quinta rueda B60D). › Semirremolques.
- B62D61/12 B62D […] › B62D 61/00 Vehículos a motor o remolques caracterizados por la disposición o el número de ruedas no previendo otro distinto, p. ej. cuatro ruedas dispuestas en rombo. › con un número variable de ruedas en contacto con el suelo, p. ej. con ciertas ruedas dispuestas más altas que las otras o con ruedas retráctiles (para las necesidades de la maniobra solamente B60S).
PDF original: ES-2377275_T3.pdf
Fragmento de la descripción:
Procedimiento para la reducción del radio de giro de vehículos industriales La invención se refiere a un procedimiento para la reducción del radio de giro de vehículos industriales según el preámbulo de la reivindicación 1.
Para vehículos industriales, en particular para vehículos articulados con vehículo tractor y semirremolque, pero también para camiones normales es importante que el círculo de viraje resulte lo más reducido posible. Un círculo de viraje reducido de este tipo facilita las maniobras en playas de expedición estrechas y la circulación en curvas cerradas en el tránsito callejero. El problema de círculos de viraje demasiado grandes se presenta, particularmente, en vehículos con gran distancia entre ejes y en vehículos con varios ejes traseros. En vehículos de este tipo existe el riesgo de que al circular en curvas cerradas puedan tocarse obstáculos dispuestos en el lado interno de la curva.
Para reducir el círculo de viraje, ya es conocido configurar el último eje de vehículos articulados como eje direccional (DE 35 25 027 A1) . De este modo, el radio de viraje puede reducirse y disminuir el desgaste de los neumáticos del último eje. Sin embargo, una ejecución del último eje como eje direccional es complicada y cara.
Además, también es conocido realizar el eje anterior o el último eje del conjunto de ejes traseros como eje elevable, con lo cual en estado levantado se evita, completamente, el desgaste de los neumáticos de dicho eje. Un levantamiento de este tipo de ejes individuales sólo es posible, por supuesto, cuando el vehículo no está cargado completamente, sino que circula solamente en el margen de carga parcial. De otro modo, los restantes ejes serían sobrecargados.
Por el documento DE 10 2004 010 561 A1 se conoce, además, un procedimiento para la maniobra de ayuda para la puesta en movimiento de vehículos articulados, en el que el anteúltimo eje del vehículo de remolque es aligerado por el conductor y, por lo tanto, el último eje puede cargarse adicionalmente. De este modo, aumenta también la carga sobre el eje motriz del tractor, con lo cual se facilita la puesta en movimiento, en particular, sobre calzada resbaladiza. Claro que, en este caso, el aligeramiento del anteúltimo eje sólo debe hacerse mientras el último eje no sea recargado. En este caso, las cargas y los aligeramientos de ejes individuales se producen mediante la entrada o salida de aire de los fuelles de suspensión neumáticos correspondientes. Este documento no contiene una referencia a los radios de viraje del vehículo.
El documento US 6.240.339 B1 da a conocer un procedimiento y un dispositivo para aligerar en forma selectiva la carga sobre las últimas ruedas de un remolque, para acortar la distancia entre ejes del remolque. Para el caso en que el vehículo presente, como mínimo, un primer ángulo de giro, la distancia entre ejes puede acortarse cuando el remolque se mueve por debajo de una primera velocidad.
El documento JP 2002 205524 A, considerado como el estado más próximo de la técnica, da a conocer un sistema de ejes de un vehículo de carga que reduce el círculo de viraje del vehículo. Para ello, el último eje trasero del vehículo está realizado como eje elevable, que solamente es levantado a determinadas cargas.
La invención tiene el objetivo de reducir el círculo de viraje de un vehículo utilitario mediante medios sencillos y económicos.
Dicho objetivo se consigue mediante la invención contenida en la reivindicación 1. Las reivindicaciones secundarias contienen desarrollos apropiados.
A continuación, la invención se explica en detalle mediante un dibujo. En el mismo muestran:
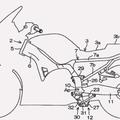
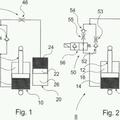
La figura 1, una representación esquemática de un vehículo articulado compuesto de tractor y semirremolque; y la figura 2, una representación esquemática del conjunto de eje trasero del semirremolque de la figura 1.
El vehículo articulado mostrado en la figura 1 se compone de un tractor (12) y un semirremolque (13) . El tractor (12) tiene dos ejes, identificadas aquí como VA1 y VA2. De ellos, el VA1 (VA = eje delantero) es dirigible.
El semirremolque (13) con los tres ejes traseros (HA1, HA2 y HA3) está acoplado al tractor (12) mediante un pivote de acoplamiento (14) . Los ejes traseros mencionados están unidos al remolque (13) por medio de fuelles de suspensión neumáticos (9) . Como se explica más adelante, los fuelles de suspensión neumáticos (9) pueden cargarse y descargarse mediante aire comprimido. De este modo, de manera conocida, pueden ajustarse el nivel del remolque y las características de suspensión. También es conocido configurar diferentes ejes traseros como ejes elevables que, por requerimiento, pueden levantarse completamente para la protección de los neumáticos correspondientes, de modo que los neumáticos ya no presentan contacto con el firme.
Para un radio de viraje cerrado deseado es decisiva la distancia entre ejes del remolque (13) . A ser posible, esta debe ser corta para un círculo de viraje estrecho. Con una carga normal y uniforme sobre los tres ejes traseros del remolque resulta para la figura 1 una distancia media entre ejes del remolque, designada aquí con (1) , y que corresponde, aproximadamente, a la distancia entre ejes del HA2. La distancia entre ejes (1) se extiende desde el pivote de acoplamiento (14) hasta el segundo eje trasero HA2, aproximadamente.
Para reducir la distancia efectiva entre ejes se reduce la carga del último eje (HA3) (véase la flecha 3) o se la traslada, en parte, a los ejes traseros anteriores al mismo (HA1, HA2) (véanse las flechas (5, 4) ) . De este modo, resulta una distancia efectiva entre ruedas (2) reducida del remolque (13) y, con ello, un círculo de viraje reducido. La distancia entre ejes (2) se extiende ahora desde el pivote de acoplamiento hasta la mitad entre HA1 y HA2, aproximadamente.
El desplazamiento citado de la carga sobre el eje hacia adelante se realiza con el propósito de reducir el círculo de viraje del vehículo articulado. Se activa, ventajosamente, cuando se necesita un círculo de viraje particularmente cerrado. El desplazamiento de la carga de eje puede tener lugar bien mediante un conmutador (no mostrado) accionado por el conductor o bien, preferentemente, también en forma automática.
Apropiadamente, el desplazamiento de la carga de eje se produce, originado por esta causa, solamente hasta una sobrecarga límite de los ejes traseros anteriores (HA1, HA2) . El valor de esta sobrecarga límite es de 130%, aproximadamente. Una sobrecarga de esta magnitud está permitida para una operación de corta duración.
La activación automática de la función puede producirse, apropiadamente, cuando el vehículo marcha a menor velocidad que la velocidad límite. En este caso, se parte de la presunción de que la circulación en curvas cerradas se realiza lentamente. En este caso, la velocidad límite está, apropiadamente, en unos 30 km/h. En la práctica, la velocidad límite es de 35 a 25 km/h
Pero también es posible hacer depender la activación de la función del desplazamiento de carga sobre el eje de la circulación en una curva. En este caso, como es sabido, una curva puede ser detectada, por ejemplo, mediante las velocidades diferentes de las ruedas delanteras izquierda y derecha del vehiculo.
Pero, también es posible evaluar las diferentes velocidades de las ruedas izquierda y derecha de uno de los ejes traseros (HA1, HA2, HA3) .
Apropiadamente, para la detección de curvas debe detectarse un radio de viraje predeterminado durante un tiempo predeterminado. En este caso, tanto el radio como el tiempo son parametrizables, es decir, especificables o modificables a pedido por el fabricante del vehículo u otros.
Con el vehículo cargado, el desplazamiento de la carga de eje puede tener lugar, por supuesto, sólo hasta que los ejes anteriores (HA1, HA2) no sean sobrecargados de manera ilícita. En este caso, deben ser cumplidas las disposiciones legales. Apropiadamente, por eso el desplazamiento de la carga de eje se produce solamente hasta una sobrecarga límite de los ejes traseros anteriores. Dicha sobrecarga puede ser, apropiadamente, de 130 por ciento, aproximadamente. Las sobrecargas prácticas están en el intervalo de 135 a 125 por ciento.
Al superar o con marchas por encima de la velocidad límite mencionada anteriormente, el último eje trasero (HA3) de un vehículo cargado parcialmente es aligerado hasta el punto de que se presenta... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la reducción del círculo de viraje de vehículos industriales con, como mínimo, un eje delantero (VA1, VA2) y, como mínimo, dos ejes traseros (HA1, HA2, HA3) , produciéndose un desplazamiento intencional de la carga de eje sobre el último eje trasero (HA3) a los ejes traseros anteriores (HA1, HA2) y produciéndose el desplazamiento de la carga de eje sólo hasta una sobrecarga límite sobre los ejes traseros anteriores, caracterizado porque la sobrecarga límite es de 130%, aproximadamente, siendo el último eje trasero (HA3) aligerado hasta que, al superar un vehículo con carga parcial la velocidad límite, se produzca sobre el primer y/o segundo eje trasero (HA1, HA2) una carga de 100% en cada uno.
2. Procedimiento según la reivindicación 1, caracterizado porque el desplazamiento de la carga de eje sobre el último eje trasero (HA3) se realiza mediante un conmutador accionado por el conductor.
3. Procedimiento según una o más de las reivindicaciones 1 y 2, caracterizado porque el desplazamiento de la carga de eje sobre el último eje trasero (HA3) se realiza de manera automática.
4. Procedimiento según una o más de las reivindicaciones 1 a 3, caracterizado porque el desplazamiento automático de la carga de eje se realiza solamente por debajo de una velocidad límite del vehículo.
5. Procedimiento según la reivindicación 4, caracterizado porque la velocidad límite es de 30 km/h, aproximadamente.
6. Procedimiento según una o más de las reivindicaciones 1 a 5, caracterizado porque el desplazamiento automático de la carga de eje se realiza solamente en curvas.
7. Procedimiento según la reivindicación 6, caracterizado porque se produce una detección automática de curvas mediante la evaluación de las diferentes velocidades de las ruedas izquierda y derecha de uno de los ejes traseros (HA1, HA2, HA3) .
8. Procedimiento según la reivindicación 7, caracterizado porque para la detección de curvas debe detectarse un radio de viraje predeterminado durante un tiempo predeterminado.
9. Procedimiento según la reivindicación 8, caracterizado porque el radio de viraje y el tiempo son parametrizables.
10. Procedimiento según una o más de las reivindicaciones 1 a 9, caracterizado porque el desplazamiento automático de la carga de eje se realiza cuando se detectad una señal intermitente.
11. Procedimiento según la reivindicación 10, caracterizado porque la señal intermitente es comunicada para su evaluación a un sistema electrónico de mando por medio de un bus o un cable exterior.
12. Procedimiento según una o más de las reivindicaciones 1 a 11, para vehículos en los que el primer eje trasero (HA1) está realizado como eje elevable, caracterizado porque en una circulación en curva por debajo de la velocidad límite, dicho eje es descendido automáticamente.
13. Procedimiento según la reivindicación 12, caracterizado porque el descenso se produce hasta la sobrecarga límite para dicho eje.
Patentes similares o relacionadas:
AMORTIGUADOR NEUMOMAGNÉTICO, del 28 de Abril de 2020, de GARCÍA SUÁREZ, Alexander: 1. Amortiguador neumomagnético, del tipo que comprenden un cilindro con un pistón , que se encuentran definiendo una cámara interior […]
SISTEMA DE AMORTIGUACIÓN AJUSTABLE PARA VEHÍCULOS, del 11 de Octubre de 2019, de TEJERO DAMAS, Victor Manuel: 1. Sistema de amortiguación ajustable para vehículos caracterizado porque está configurado a partir de un amortiguador ajustable formado por un resorte , de tal manera […]
Protección contra fuerzas excesivas en una disposición de suspensión, del 29 de Noviembre de 2018, de Teknologian tutkimuskeskus VTT Oy: Una disposición de suspensión para suspender un objeto a un bastidor y para protección contra fuerzas de excitación excesivas (Fe) transmitidas […]
Dispositivo de válvula para un sistema de suspensión neumática, del 17 de Mayo de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle (14, […]
Dispositivo de válvula para un sistema de suspensión neumática, del 12 de Abril de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle , […]
Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, del 18 de Enero de 2017, de SIEMENS AG OSTERREICH: Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, en donde desde el estado actual de un vehículo se derivan parámetros […]
 Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
 Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]
Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]