Dispositivo y procedimiento para la activación de medios de protección de personas teniendo en cuenta coeficientes de agarre de la carretera.
Dispositivo para la activación de medios de protección de personas (RHS),
en el que el dispositivo activa los medios de protección de personas (RHS) en función de un proceso de vuelco, caracterizado porque el dispositivo presenta una interfaz, a través de la cual el dispositivo recibe una señal, que transite un coeficiente de agarre (!), y porque el dispositivo presenta un circuito de evaluación (!C), en el que el circuito de evaluación (!C) activa, en función de la señal y de un factor de estabilidad (SSF), los medios de protección de personas, en el que el circuito de evaluación (!C) determina el factor de estabilidad (SSF) en función de al menos una variable cinemática a partir de las variables de una instalación de detección (S) .
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/051620.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: SCHMID, MICHAEL, GOLOMBECK,MARC-ANDRE, DENZ,HOLGER, DOERR,Alfons.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/0132 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › en respuesta a parámetros sobre el movimiento del vehículo.
PDF original: ES-2381126_T3.pdf
Fragmento de la descripción:
Dispositivo y procedimiento para la activación de medios de protección de personas teniendo en cuenta coeficientes de agarre de la carretera.
Estado de la técnica La invención se refiere a un dispositivo y a un procedimiento para la activación de medios de protección de personas del tipo de la reivindicación independiente de la patente.
Se conoce a partir del documento DE 103 03 149 A1 que forma el tipo activar unos medios de protección de personas durante un proceso de vuelco en función de variables cinemáticas, como la aceleración transversal del vehículo y una tasa de giro. Se conoce a partir del documento DE 698 24 412 T2 prever un sistema de freno, que es activado en función de una señal de vuelco.
Publicación de la invención El dispositivo de acuerdo con la invención o bien el procedimiento de acuerdo con la invención para la activación de medios de protección de personas tienen, en cambio, la ventaja de que a través de la utilización de un coeficiente de agarre, que se introduce a través de una interfaz del dispositivo de acuerdo con la invención, es posible una resolución más precisa y más exacta en el tiempo de los medios de protección de personas durante un proceso de vuelco. En particular, a través de otros sistemas del vehículo, que calculan muy exactamente el coeficiente de agarre. Como por ejemplo un sistema de frenos, un sistema de motor o una instalación de detección de las ruedas, se puede conseguir una exactitud más elevada con respecto al coeficiente de agarre. A través de la comparación con el factor de estabilidad se puede realizar también a través de la previsión o evaluación de los coeficientes de agarre actuales y del factor de estabilidad actual una activación de los medios de protección de personas durante un vuelco del vehículo. El dispositivo presenta a tal fin un circuito de evaluación, que lleva a cabo esta comparación. El circuito de evaluación está configurado, por ejemplo, como microcontrolador. En el factor de estabilidad se trata de la relación de la distancia vertical y horizontal del punto de contacto con respecto al centro de gravedad del vehículo (figura 4) . El punto de contacto en el neumático. A través del movimiento de vuelco, que se caracteriza con preferencia por la tasa de giro, se modifica la relación de la distancia vertical y horizontal entre el punto de contacto y el centro de gravedad del vehículo. Puesto que se conoce el estado de reposo cuando el vehículo está parado, a partir de al menos una variable cinemática como la tasa de giro se puede determinar el factor de estabilidad.
A través de las medidas y desarrollos indicados en las reivindicaciones dependientes son posibles mejoras ventajosas del dispositivo indicado en las reivindicaciones independientes de la patente y del procedimiento indicado en las reivindicaciones independientes de la patente.
Es especialmente ventajoso que esté previsto un circuito de activación, que forma parte del dispositivo y que es utilizado para la selección o bien para el bloqueo de medios de protección de personas en función de la comparación entre coeficiente de agarre y factor de estabilidad. Para la determinación del factor de estabilidad se utilizan con preferencia la tasa de oscilación y otra variable cinemática, como por ejemplo el retardo en la dirección longitudinal del vehículo, en la dirección transversal del vehículo y/o en la dirección vertical del vehículo. La instalación de detección se puede encontrar dentro o fuera de un aparato de control para la activación de medios de protección de personas. En particular es posible que el dispositivo para la activación de los medios de protección de personas esté previsto en un aparato de control propio o forme parte de otro aparato de control, por ejemplo para el tratamiento de una seguridad activa, como un aparato de control para la regulación de la dinámica de la marcha. La interfaz de acuerdo con la invención está entonces dentro del aparato de control. Si está presente un aparato de control propio para la activación de los medios de protección de personas, entonces la interfaz está hacia fuera, es decir, por ejemplo es un controlador de bus, cuando el coeficiente de agarre es generado por un aparato de control para la regulación de la dinámica de la marcha y se transmite a través de un bus de vehículo, por ejemplo un bus CAN, al aparato de control para la activación de los medios de protección de personas.
El circuito de evaluación está configurado especialmente para la predicción, es decir, para la previsión del coeficiente de agarre. En este caso, se pueden utilizar para la predicción algoritmos conocidos por el técnico. En particular, a partir de un comportamiento se puede deducir a través de comparación con datos memorizados un comportamiento futuro. En este caso, se pueden utilizar métodos habituales del llamado adaptador.
Los ejemplos de realización de la invención se representan en el dibujo y se explican en detalle en la descripción siguiente. En este caso:
La figura 1 muestra un diagrama de bloques del dispositivo de acuerdo con la invención. La figura 2 muestra otro diagrama de bloques. La figura 3 muestra un tercer diagrama de bloques, y La figura 4 muestra una representación de principio.
Cifras de los USA documentan la importancia de la seguridad pasiva en el caso de vuelcos de automóviles. En el año 1998, la mitad de todos los accidentes de vehículos individuales con muertos eran atribuibles a un vuelco. En el conjunto de los accidentes, el vuelco del vehículo representa un porcentaje en torno al 20 %.
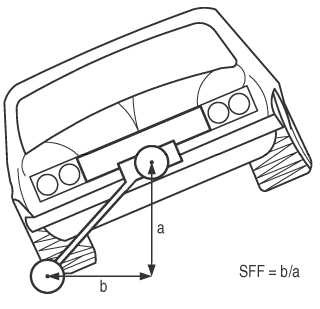
De acuerdo con la invención, el coeficiente de agarre actual se utiliza como una variable de influencia esencial en la dinámica de vuelco de vehículos para activar medios de protección de personas durante un proceso de vuelco. La 10 modificación temporal de la tasa de oscilación se define a través de la siguiente ecuación:
rx es en este caso la tasa de giro actual del vehículo alrededor del punto de contacto del vehículo durante el vuelco del vehículo, d/drx es la modificación actual de la tasa de giro. Fy (t) es la fuerza que actúa lateralmente como consecuencia del movimiento lateral del vehículo. De acuerdo con ello, las fuerzas laterales que actúan realmente o 15 bien la estimación de las fuerzas que actúan todavía, que se pueden medir o bien prever con la ayuda de sensores de aceleración solamente son un criterio, que es esencial para la previsión de vuelcos de vehículos. Si el coeficiente de agarre actual o futuro no alcanza el factor de estabilidad efectivo SSF (Static Stability Factor) del vehículo, entonces no es previsible un movimiento de vuelco del vehículo. J es el momento de inercia correspondiente conocido del vehículo y heff es la altura actual del centro de gravedad del vehículo en el punto de vuelco. El SSF 20 efectivo del vehículo es la relación (SSF=b/a) que varía constantemente durante un proceso de vuelco de la distancia vertical (a) y de la distancia lateral (b) del centro de gravedad del vehículo 41 con respecto al punto de contacto actual 40, como se explica con la ayuda de la figura 4. El punto de contacto es el punto de giro del vehículo. El SSF efectivo se reduce, en general, a medida que se incrementa el ángulo de balanceo. La posición del centro de gravedad se determina a través del fabricante del vehículo por medio de una instalación de pesaje y, por lo tanto, 25 está presente como dato. En el caso de una inclinación del vehículo, se puede estimar la posición modificada del centro de gravedad al principio de una manera aproximada a partir de las curvas características de resorte, al comienzo del proceso de vuelco a través de las ruedas a partir del ángulo de cabeceo y de la suspensión máxima de las ruedas. La posición estimada se puede verificar a través de comparación del par de torsión que actúa realmente entre la tasa de giro rx y las aceleraciones que actúan realmente en el centro de gravedad a partir de las aceleraciones ay y az: M = F*r. M es proporcional a la aceleración giratoria, F es proporcional a la aceleración lineal en dirección-y y en dirección-z. r es la distancia con respecto al punto de contacto.
El coeficiente de agarre ! (t) se determina, por ejemplo, de acuerdo con las enseñanzas del documento DE 41 34 831 A1. Allí se designa el coeficiente de agarre como coeficiente de fricción. La información del coeficiente de fricción se genera en función de la magnitud del momento de accionamiento detectado. No obstante, existen también otros métodos para determinar el coeficiente de agarre. A ellos pertenece, por... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para la activación de medios de protección de personas (RHS) , en el que el dispositivo activa los medios de protección de personas (RHS) en función de un proceso de vuelco, caracterizado porque el dispositivo presenta una interfaz, a través de la cual el dispositivo recibe una señal, que transite un coeficiente de agarre (!) , y porque el dispositivo presenta un circuito de evaluación (!C) , en el que el circuito de evaluación (!C) activa, en función de la señal y de un factor de estabilidad (SSF) , los medios de protección de personas, en el que el circuito de evaluación (!C) determina el factor de estabilidad (SSF) en función de al menos una variable cinemática a partir de las variables de una instalación de detección (S) .
2. Dispositivo de acuerdo con la reivindicación 1, caracterizado porque el dispositivo presenta, además, un circuito de activación (FLIC) que lleva a cabo, en función de una señal de activación del circuito de evaluación, una selección o bien un bloqueo de los medios de protección de personas (RHS) .
3. Dispositivo de acuerdo con una de las reivindicaciones 1 ó 2, caracterizado porque está prevista una instalación de detección para la detección de variables cinemáticas, que está conectada con el circuito de evaluación (!C) , en el que la instalación de detección está configurada para la detección de la tasa de oscilación (rx) y de al menos otra variable.
4. Dispositivo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el circuito de evaluación está configurado de tal forma que el circuito de evaluación lleva a cabo, con la ayuda de la señal y del factor de estabilidad, una previsión de estas variables.
5. Dispositivo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la interfaz está prevista en un aparato de control y crea una conexión con una regulación de la dinámica de la marcha.
6. Dispositivo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la interfaz está configurada como controlador de bus.
7. Procedimiento para la activación de medios de protección de personas, en el que los medios de protección de personas son activados en función de un proceso de vuelco, caracterizado porque a través de una interfaz se genera una señal, que caracteriza un coeficiente de agarre, porque en función de la señal y de un factor de estabilidad se activan los medios de protección de personas, siendo determinado el factor de estabilidad en función de al menos una variable cinemática.
8. Procedimiento de acuerdo con la reivindicación 7, caracterizado porque en función de una señal de activación se realiza una selección y/o un bloqueo de medios de protección de personas.
9. Procedimiento de acuerdo con la reivindicación 7 u 8, caracterizado porque en función de la señal y del factor de estabilidad se prevén estas variables.
Patentes similares o relacionadas:
SISTEMA ELECTRÓNICO EMBEBIDO PARA LA DETECCIÓN DE INTENCIÓN DE FRENADO DE UN CONDUCTOR EN SITUACIONES DE EMERGENCIA, del 20 de Junio de 2019, de INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY: La invención se refiere a un sistema electrónico embebido para la detección de intención de frenado de un conductor en situaciones de emergencia, utilizando […]
Procedimiento para hacer funcionar un sistema de seguridad de un automóvil en caso de una colisión y automóvil, del 17 de Abril de 2019, de AUDI AG: Procedimiento para hacer funcionar un sistema de seguridad de un automóvil en caso de una colisión con un objeto de colisión, registrándose mediante […]
Método, aparato y programa informático para detectar una colisión utilizando datos de acelerómetro, del 7 de Marzo de 2019, de Redtail Telematics Limited: Un método para detectar una colisión usando un acelerómetro conectado a un vehículo; comprendiendo el método: recibir datos de aceleración del […]
Método y aparato para controlar un dispositivo de seguridad accionable, del 10 de Octubre de 2018, de TRW AUTOMOTIVE U.S. LLC: Un método para determinar una condición de colisión de un vehículo incluyendo los pasos de: detectar aceleración de colisión en una primera dirección sustancialmente […]
Dispositivo para la puesta a disposición de una característica de activación para la activación de un dispositivo de seguridad de un vehículo motorizado, del 30 de Mayo de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Dispositivo para la puesta a disposición de una característica de activación (12a, b) para una señal de activación que provoca una activación de un dispositivo […]
Procedimiento y aparato de control para controlar medios para la protección de personas para un vehículo, del 11 de Abril de 2018, de ROBERT BOSCH GMBH: Procedimiento para el control de medios para la protección de personas (PS) para un vehículo (FZ) en función de un proceso de vuelco que se detecta en función de variables de […]
Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor, del 9 de Agosto de 2017, de AUDI AG: Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor mediante - detección de un desarrollo […]
Sistema de protección contra colisión y/o de personas para un vehículo motorizado, del 20 de Julio de 2016, de AUDI AG: Sistema de protección contra choques y de personas , en particular sistema de protección para ocupantes o sistema de protección de peatones para un vehículo motorizado, […]