Procedimiento para el funcionamiento de un sistema de dirección en un vehículo de motor.
Procedimiento para el funcionamiento de un sistema de dirección en un vehículo (10) de motor,
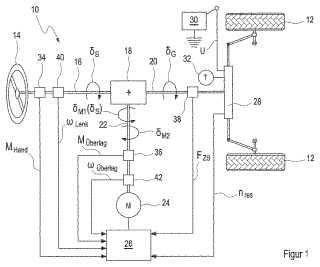
en el que, por mediode un elemento (14) de manejo de la dirección, se puede girar en el sistema de dirección un primer árbol (16), que, através de un engranaje (18) de superposición da lugar al giro de un segundo árbol (20) acoplado por medio de unaunidad (28) generadora de una fuerza auxiliar acoplada con las ruedas (12) y en el que en el engranaje (18) desuperposición también se introduce un tercer árbol (22) al que se puede imprimir con un motor (24) eléctrico una rotación,
que se manifiesta por un giro adicional del segundo árbol (20), siendo excitado el motor (24) eléctrico por una unidad (26)de mando a la que se asignan premisas preestablecidas para un funcionamiento básico, siendo aportadas a la unidad(26) de mando señales para la información de los valores actuales de al menos una magnitud (nres, MManual, MSuperposición,FZS, ωLenk, ωSuperposición), que es una medida de la carga actual de la unidad (28) generadora de la fuerza auxiliar,caracterizado porque según los valores transmitidos, la unidad de mando da lugar de acuerdo con una situación a)al giro del tercer árbol alrededor de un primer ángulo (δM1), que es determinado exclusivamente por las premisaspreestablecidas
o de acuerdo con una situación b)
al giro del tercer árbol tanto el primer ángulo (δM1), que es determinado exclusivamente por las premisaspreestablecidas, como también alrededor de un segundo ángulo (δM2).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10002547.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: ULLMANN, STEFAN, Stemmer,Martin.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B).
- B62D5/04 B62D […] › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
- B62D6/00 B62D […] › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
PDF original: ES-2391619_T3.pdf
Fragmento de la descripción:
Procedimiento para el funcionamiento de un sistema de dirección en un vehículo de motor
El invento se refiere a un procedimiento para el funcionamiento de un sistema de dirección en un vehículo de motor.
Se partió de un sistema de dirección, que poseía tanto una dirección con fuerza auxiliar, como también una dirección de superposición. Esto significa, que un elemento de manejo de la dirección está acoplado con un primer árbol y que un giro del primer árbol se transmite a un engranaje de superposición en cuya salida se dispone un segundo árbol, que gira debido al giro del primer árbol. Detrás del segundo árbol se dispone una unidad, que genera una fuerza auxiliar, que incrementa de manera en sí conocida la fuerza transmitida por el segundo árbol a las ruedas acopladas con él. Lo característico del engranaje de superposición es que en él se introduce un tercer árbol en calidad de segunda entrada. El tercer árbol está acoplado con un motor eléctrico, que le puede imprimir un giro. La finalidad es que el segundo árbol gire un ángulo adicional. El engranaje de superposición puede ser configurado como engranaje planetario o como engranaje de ejes. El motor eléctrico es excitado usualmente con una unidad de mando. Esta funciona debido a determinadas premisas en un estado básico. Las premisas preestablecidas dan lugar de manera típica a que al tercer árbol se imprima un giro alrededor de un ángulo adicional, que depende del ángulo de dirección generado por el elemento de manejo de la dirección, por ejemplo es proporcional a él o se desprende de él debido a relaciones matemáticas o tabuladas.
En la combinación de una dirección de superposición (con engranaje de superposición y motor eléctrico) , por un lado, y la unidad generadora de la fuerza auxiliar, por otro, puede suceder, que la unidad generadora de la fuerza auxiliar alcance su límite de potencia, ya que el ángulo adicional Imprimido puede ser elegido eventualmente demasiado grande, de modo, que en el segundo árbol se alcancen velocidades angulares, que jamás podrían ser imprimidas por el conductor al sistema utilizando sólo el elemento de manejo de la dirección. En especial, cuando se utiliza un motor eléctrico en la unidad generadora de la fuerza auxiliar se pueden exigir de este motor eléctrico números de revoluciones tan altos, que llegue al límite del número de revoluciones.
La combinación de una dirección superpuesta con dirección con fuerza auxiliar en un vehículo de motor debe ser aprovechada de manera óptima.
Esto significa, que es preciso un funcionamiento muy próximo al límite de potencia de la fuerza auxiliar, pero que este no debe ser rebasado.
A través del documento EP 0 904 225 B1 se conoce, para evitar un funcionamiento incorrecto en un sistema con dirección de superposición, el procedimiento de que el ángulo adicional imprimido por el motor eléctrico se agote de manera continua, cuando el elemento de manejo de la dirección se aproxima durante su accionamiento a un tope de la dirección. En este caso forma parte de las premisas preestablecidas para un funcionamiento básico una curva característica para el ángulo adicional implementada en la unidad de mando asignada al motor eléctrico. No tiene lugar una adaptación a la situación actual de la dirección.
A través del documento DE 10 2006 007 250 A1 se conoce el procedimiento de ajustar el ángulo adicional de tal modo, que la velocidad angular en el segundo árbol no supere un valor máximo, pudiendo fijar este valor máximo en fundón de la situación. En un ejemplo se determina esta situación por medio de la velocidad del vehículo y en otro ejemplo por medio de la velocidad del vehículo y también la velocidad de dirección. En este documento no se menciona una dirección con fuerza auxiliar, de manera, que no se tiene en cuenta la posible potencia de ella. Si se combinara el procedimiento del documento DE 10 2006 007 250 A1 con una dirección con fuerza auxiliar, sería preciso partir de un par medio a generar por el motor de la unidad creadora de la fuerza auxiliar. El procedimiento no sería entonces apropiado para todos las clases de suelo sobre el que circula el vehículo, es decir sobre el que ruedan las ruedas.
El documento DE 103 53 084 A1 describe un vehículo de motor con una dirección con fuerza auxiliar y con una dirección de superposición, que, al rebasar un valor límite de la potencia de la unidad generadora de la fuerza auxiliar, agrega al ángulo de dirección creado con el dispositivo de manejo de la dirección un ángulo adicional dirigido en el sentido contrario. El valor límite de la potencia se presupone constante, es decir fijo en el documento DE 103 53 084 A1. Esto significa, que no se tienen en cuenta las variaciones de la potencia de la unidad generadora de la fuerza auxiliar.
El documento DE 10 2006 025 790 A1 divulga finalmente, que el ángulo agregado adicionalmente al ángulo de dirección del sistema de dirección puede ser configurado dependiente del estado de potencia momentáneo de la red de a bordo del vehículo. Si bien el estado de potencia de la red de a bordo determina la potencia de la unidad generadora de la fuerza auxiliar, en especial de un motor eléctrico alimentado con la red de a bordo, no es esta la magnitud determinante de manera exclusiva, de manera, que en este caso también es preciso ajustar el sistema de tal modo, que se tengan en cuenta diferentes condiciones del medio ambiente. Con ello, el sistema tampoco puede aprovechar de manera óptima la unidad generadora de la fuerza auxiliar en numerosas condiciones del medio ambiente.
El documento DE 10 2006 036 751 A1 describe las características del preámbulo de la reivindicación 1.
Por ello, el objeto del invento es divulgar un procedimiento para el funcionamiento del sistema de dirección en un vehículo de la clase descrita más arriba en el que el aprovechamiento de la unidad generadora de la fuerza auxiliar se pueda configurar mejor, respectivamente está configurado de una manera más ventajosa.
El problema se soluciona con un procedimiento con los pasos según la reivindicación 1.
De acuerdo con el invento se aportan a la unidad de mando señales para informar de los valores actuales de al menos una magnitud, debiendo ser esta magnitud una medida de la carga actual de la unidad generadora de la fuerza auxiliar. La carga actual resulta de la potencia generada realmente por la unidad generadora de la fuerza auxiliar y de la capacidad de potencia teórica. En otro contexto también se hablaría de “régimen normal”.
La unidad de mando distingue ahora sobre la base de los valores suministrados entre dos situaciones. En la situación a) se ajusta un funcionamiento básico en el que al aplicar un ángulo de dirección por medio del dispositivo de manejo de la dirección se provoca el giro del tercer árbol en un primer ángulo adicional determinado únicamente por las premisas preestablecidas, pudiendo abarcar, como se expuso más arriba, las premisas preestablecidas la condición de que este ángulo adicional dependa del ángulo de dirección. Esta dependencia puede ser tan amplia, que con un ángulo de dirección de 0º se aplique también un ángulo adicional de 0º.
En la situación b) se crea, además de este ángulo adicional agregado en cualquier caso, un segundo ángulo adicional, es decir, que se provoca el giro del tercer árbol en un segundo ángulo adicional de esta clase, con preferencia en el sentido contrario al primer ángulo adicional. De manera alternativa también se puede producir la situación b) , cuando la carga actual se hallar muy por debajo del límite de carga, siendo entonces posible, que el segundo ángulo adicional esté dirigido en el mismo sentido que el primer ángulo adicional.
El segundo ángulo adicional puede ser restado en este caso de manera sencilla del primer ángulo adicional o puede ser implementado realmente con un retardo de tiempo en el tercer árbol (o incluso adelantándose en el tiempo.
Una magnitud especialmente apropiada, que puede ser utilizada en el procedimiento según el invento, es la reserva del número de revoluciones de un motor eléctrico, que forma parte de la unidad generadora de fuerza auxiliar. La reserva de número de revoluciones es la diferencia entre el número de revoluciones máximo posible y el número de revoluciones actual. El número de revoluciones máximo posible puede ser determinado a partir de la potencia, que puede ser generada teóricamente y el par... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el funcionamiento de un sistema de dirección en un vehículo (10) de motor, en el que, por medio de un elemento (14) de manejo de la dirección, se puede girar en el sistema de dirección un primer árbol (16) , que, a través de un engranaje (18) de superposición da lugar al giro de un segundo árbol (20) acoplado por medio de una unidad (28) generadora de una fuerza auxiliar acoplada con las ruedas (12) y en el que en el engranaje (18) de superposición también se introduce un tercer árbol (22) al que se puede imprimir con un motor (24) eléctrico una rotación, que se manifiesta por un giro adicional del segundo árbol (20) , siendo excitado el motor (24) eléctrico por una unidad (26) de mando a la que se asignan premisas preestablecidas para un funcionamiento básico, siendo aportadas a la unidad
(26) de mando señales para la información de los valores actuales de al menos una magnitud (nres, MManual, MSuperposición, FZS, WLenk, WSuperposición) , que es una medida de la carga actual de la unidad (28) generadora de la fuerza auxiliar, caracterizado porque según los valores transmitidos, la unidad de mando da lugar de acuerdo con una situación a)
al giro del tercer árbol alrededor de un primer ángulo (OM1) , que es determinado exclusivamente por las premisas preestablecidas
o de acuerdo con una situación b)
al giro del tercer árbol tanto el primer ángulo (OM1) , que es determinado exclusivamente por las premisas preestablecidas, como también alrededor de un segundo ángulo (OM2) .
2. Procedimiento según la reivindicación 1, en el que al menos una magnitud comprende una reserva (nres) de número de revoluciones de un motor eléctrico de la unidad (28) generado de la fuerza auxiliar.
3. Procedimiento según la reivindicación 1 ó 2, en el que al menos la magnitud comprende
a) un par (MManual) , que actúa sobre el primer árbol o adicionalmente la velocidad (WDirección) angular del primer árbol
(16)
y/o
b) un par (MSuoerposión) , que actúa sobre el tercer árbol (22) , respectivamente la intensidad de la corriente aplicada al motor (24) eléctrico acoplado con el tercer árbol (22) o adicionalmente la velocidad (WSuperposición) angular del tercer árbol (22)
y/o
c) la fuerza (FZS) , que actúa sobre una cremallera acoplada con el segundo árbol (20) .
4. Procedimiento según una de las reivindicaciones 1 a 3, en el que la unidad (26) de mando parte de la situación a) , cuando el valor se halla dentro de un margen de valores preestablecido y de la situación b) , cuando el valor se halla fuera de este margen de valores.
5. Procedimiento según una de las reivindicaciones 1 a 3, en el que la unidad de mando determina a partir del valor aportado de una o de varias magnitudes y de acuerdo con una norma de asignación un valor límite de la velocidad angular del segundo árbol (20) y parte de la situación a) , cuando el valor real de la velocidad angular del segundo árbol
(20) se halla por debajo del valor límite y de la situación b) , cuando el valor real de la velocidad angular del segundo árbol
(20) se halla por encima del valor límite y cuando en este caso el segundo ángulo está dirigido en el sentido contrario del primer ángulo (OM1) .
6. Procedimiento según una de las reivindicaciones precedentes en el que las premisas preestablecidas abarcan, que el primer ángulo (OM1 (OS) ) se determina en función de un ángulo (OS) de dirección imprimido por medio del elemento (14) de manejo de la dirección al primer árbol (16) .
7. Procedimiento según la reivindicación 6, en el que el segundo ángulo (OM2) se define con independencia del ángulo (OS) de dirección.
8. Procedimiento según la reivindicación 6, en el que el segundo ángulo (OM2) adicional se determina en función del ángulo (OS) de dirección de manera no proporcional al primer ángulo (OM1) adicional.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]