Dispositivo de conducción para la mejora de la motricidad de un vehículo.
Dispositivo de conducción de vehículo, especialmente de un vehículo automóvil con dos ruedas motrices,
quemarcha sobre una carretera o terreno, destinado a definir consignas de pares motores y de frenado de las ruedas delvehículo, que tiene:
- unos medios (10, 20, 30) para generar diferentes 5 modos de conducción en función de los parámetros demarcha del vehículo tales como las velocidades de rotación de las ruedas, la velocidad en curva, laaceleración lateral y longitudinal, la presión sobre el mando de los frenos ejercida por el conductor, y un tipo defase de marcha elegido por el conductor entre diferentes fases de marcha preestablecidas correspondientes adiferentes tipos de carreteras y de terrenos y de condiciones de marcha del vehículo;
- unos medios de estimación (40) de la situación de vida del vehículo, estando el dispositivo configurado paradeterminar un modo de conducción óptimo (32, 34, 36, 38) entre los diferentes modos de conducción quepueden ser generados por el dispositivo en función de la fase de marcha estimada y del modo de la fase demarcha elegido por el conductor, teniendo los medios de estimación de la situación del terreno una lógica dereconocimiento LR (40) del tipo de carreteras o de terrenos que confirma o no el modo de fase de marchaelegido por el conductor;
- un dispositivo de selección (80) que permite al conductor seleccionar una fase de marcha;
caracterizada porque los medios para generar los diferentes modos de conducción tienen:
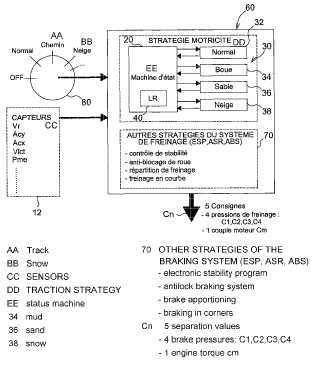
- una máquina de estado (20) que utiliza la información de la fase de marcha procedente del dispositivo deselección y las informaciones generadas por los captadores (12) presentes en el vehículo, especialmente delos captadores de velocidad de rotación (Vr) de las ruedas, la velocidad en curva (Vlc), las aceleracioneslateral y longitudinal (Acx), la presión del cilindro de mando (Pm) para activar algoritmos, de los cuales algunosson específicos;
- módulos de conducción (30) comprendiendo cada uno (32, 34, 36, 38) un algoritmo que corresponde aestrategias de conducciones asociadas a diferentes estados en la máquina de estado y que definen consignasde conducción del par motor y del frenado de las ruedas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/062663.
Solicitante: PEUGEOT CITROEN AUTOMOBILES SOCIETE ANONYME.
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY 78140 VELIZY VILLACOUBLAY FRANCIA.
Inventor/es: ABADIE, VINCENT, BLAISE,Philippe, JOUCGNOUX,Damien.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/175 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para prevenir el patinado excesivo de las ruedas durante la aceleración del vehículo, p.ej. por el control de la tracción.
- B60T8/1755 B60T 8/00 […] › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
- B60W10/00 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00).
- B60W10/12 B60W […] › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de diferenciales.
- B60W10/18 B60W 10/00 […] › incluyendo el control de sistemas de frenado.
- B60W30/18 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Propulsión del vehículo.
- B60W40/06 B60W […] › B60W 40/00 Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › Condiciones de la vía.
PDF original: ES-2387046_T3.pdf
Fragmento de la descripción:
Dispositivo de conducción para la mejora de la motricidad de un vehículo
El presente invento se refiere a los dispositivos para la mejora de la motricidad de los vehículos que ruedan por carreteras o terrenos con unas características diferentes y según fases de marcha diferentes. Se refiere más particularmente, aunque no exclusivamente, a un dispositivo de conducción de un vehículo con dos
ruedas motrices (4x2) . Las fases de marcha referidas son desplazamientos en marcha hacia delante o hacia atrás por carreteras o terrenos que tienen:
- partes cenagosas, hierba, rodadas, lodazales (marcha en todo tipo de terreno) ;
- arena; -nieve o hielo; y esto con diferentes niveles de pendientes. En estas fases de marcha, los sistemas utilizados en el vehículo son: -una transmisión 4x4 (cuatro ruedas motrices) ; -dispositivos específicos en los vehículos 4x2 (dos ruedas motrices) : antiderrape normal o diferenciales
con deslizamiento limitado. Los dispositivos antiderrape, también designado por el acrónimo ASR “Anti Slip Regulation” en lengua anglosajona,
están destinados a mejorar la prestación de motricidad durante la marcha de un vehículo automóvil en todo tipo de terreno. Estos dispositivos son potencialmente aplicables a todo vehículo con dos ruedas motrices 4x2 o con cuatro ruedas
motrices 4x4 equipado con un sistema de control dinámico de trayectoria designado igualmente por el acrónimo “ESP” para “Electronic Stability Program” en lengua anglosajona y que permiten hacer evolucionar de manera significativa la prestación de motricidad de los vehículos.
El ESP asegura diferentes funciones como:
- el control de curvas CDC;
- el antibloqueo de las ruedas o ABS “Anti Braking System” en lengua anglosajona;
- el antiderrape de las ruedas o ASR;
- y otras funciones de seguridad en la conducción de un vehículo. Los límites de estos dispositivos se exponen a continuación:
Relativos a los vehículos 4x2:
- el Diferencial de Deslizamiento limitado: este sistema por su modo de funcionamiento genera en ciertas condiciones un bloqueo del diferencial, que iguala las velocidades de rotación de las ruedas. Así, en adherencias diferentes izquierda/derecha moderadas (por ejemplo, hierba mojada en un lado y tierra en el otro) la motricidad se mejorará ligeramente. Sin embargo, las prestaciones son limitadas, sobre todo en las condiciones de las diferencias de adherencia derecha/izquierda más importante o de bajas adherencias homogéneas;
- el ASR tradicional: desde su aparición en los vehículos, el ASR ha sido perfeccionado, lo que ha permitido una mejora continua de sus prestaciones generales. El sistema ASR, por la limitación del par motor (AMR) y la repartición de las presiones de frenado (BASR) , limita el deslizamiento de las ruedas. Las actuales prestaciones de los ASR tradicionales siguen siendo no obstante muy limitadas en las situaciones de marcha en todo tipo de terreno, debido a la necesidad de gestionar numerosos compromisos en la puesta a punto del sistema, sobre todo la compatibilidad con rodaduras entre de hielo/nieve y lodo, por ejemplo.
Relativos a los vehículos 4x4:
- existen numerosos tipos de vehículos 4x4 con transmisiones AV/AR más o menos evolucionadas. Las prestaciones del sistema en cuanto a motricidad son significativamente mejores que las soluciones antes expuestas. Los principales inconvenientes de estas soluciones son: el importante sobrecoste, el peso suplementario importante para el vehículo, su complejidad de desarrollo y de la puesta a punto y su dificultad de integración geométrica en los vehículos de pequeña y mediana gama.
La Patente de EEUU 5.620.393 describe un dispositivo de conducción que comprende las características que son objeto del preámbulo de la reivindicación 1.
Sin embargo, según este conocido dispositivo, no es más que sólo cuando se ha elegido el modo de conducción “deportiva” del vehículo cuando se tiene sólo en cuenta un parámetro de adherencia del vehículo para sustraerse bien al tipo de accionamiento específico del modo de conducción “deportiva” o bien para anticipar un cambio de relación de velocidades en función de la fase de marcha.
El presente invento tiene como objeto paliar los inconvenientes de los dispositivos de mejora de la motricidad de los vehículos de la técnica anterior al ofrecer un dispositivo adaptable a cualquier vehículo que tenga necesidad de diferentes estrategias de conducción.
Para esto, el invento propone un dispositivo de conducción que comprende unas características tales como las enunciadas en la parte caracterizadora de la reivindicación 1.
En una realización del dispositivo según el invento los modos de conducción del sistema consisten en la optimización del punto de funcionamiento del neumático en la señal esfuerzo longitudinal / proporción de deslizamiento, principalmente en función de:
- la adherencia disponible, realizándose esta estimación con la ayuda de captadores de los parámetros de evolución del vehículo y del modo seleccionado por el conductor;
- la velocidad y la aceleración longitudinal del vehículo;
- en los virajes, la velocidad en la curva y la aceleración lateral del vehículo.
En otra realización los módulos de conducción tienen un primer módulo que define una estrategia de conducción para terreno o carretera normal, un segundo módulo que define una estrategia para carretera cenagosa, un tercer módulo para carretera arenosa y un cuarto módulo para carretera con nieve.
En otra realización la máquina de estado así como los módulos de conducción se han dispuesto en un calculador del vehículo, por ejemplo en el ESP del vehículo.
En otra realización el dispositivo de selección está dispuesto en el salpicadero con la forma de un botón para la elección por el conductor de a fase de marcha.
El sistema consiste en un dispositivo de manejo de los pares motores y de frenado a las cuatro ruedas diferenciado según las fases de marcha. Esta conducción podrá ser realizada por un sistema de frenado de tipo ESP que permite obtener unas presiones de frenado independientes en las cuatro ruedas y por el motor, el cual permite generar un par positivo a las ruedas.
La diferenciación en función de las fases de marcha hace posible manualmente por la presencia de un indicador en el salpicadero (que tiene, por ejemplo, las posiciones normal / todo tipo de camino / nieve / arena) que permite adaptar los algoritmos a la fase de marcha que es percibida por el conductor.
Se comprenderá mejor el invento por la descripción de un ejemplo de realización de un dispositivo de conducción según el invento con la ayuda de los dibujos con índice, en los cuales:
- la figura 1 representa un cuadro sinóptico del principio del dispositivo de conducción según el invento; y
- la figura 2 representa un modo de realización del dispositivo de la figura 1 según el invento.
La figura 1 representa un cuadro sinóptico del principio del dispositivo de conducción según el invento. El dispositivo comprende:
- un dispositivo de selección 10 (indicador o selector) que permite al conductor seleccionar una fase de marcha, por ejemplo todo tipo de camino, nieve, arena, u otro;
- una máquina de estado 20 que utiliza la información de la fase de marcha (todo tipo de camino, nieve, arena, u otro) que procede del dispositivo de selección y de las informaciones generadas por los captadores 12 presentes en el vehículo, sobre todo las velocidades de rotación Vr de las ruedas, velocidad en la curva Vlc, aceleraciones lateral Acy y longitudinal Acx, presión del cilindro de mando Pm para activar los algoritmos de los que algunos son específicos;
-
Reivindicaciones:
1. Dispositivo de conducción de vehículo, especialmente de un vehículo automóvil con dos ruedas motrices, que marcha sobre una carretera o terreno, destinado a definir consignas de pares motores y de frenado de las ruedas del vehículo, que tiene:
- unos medios (10, 20, 30) para generar diferentes modos de conducción en función de los parámetros de marcha del vehículo tales como las velocidades de rotación de las ruedas, la velocidad en curva, la aceleración lateral y longitudinal, la presión sobre el mando de los frenos ejercida por el conductor, y un tipo de fase de marcha elegido por el conductor entre diferentes fases de marcha preestablecidas correspondientes a diferentes tipos de carreteras y de terrenos y de condiciones de marcha del vehículo;
- unos medios de estimación (40) de la situación de vida del vehículo, estando el dispositivo configurado para determinar un modo de conducción óptimo (32, 34, 36, 38) entre los diferentes modos de conducción que pueden ser generados por el dispositivo en función de la fase de marcha estimada y del modo de la fase de marcha elegido por el conductor, teniendo los medios de estimación de la situación del terreno una lógica de reconocimiento LR (40) del tipo de carreteras o de terrenos que confirma o no el modo de fase de marcha elegido por el conductor;
- un dispositivo de selección (80) que permite al conductor seleccionar una fase de marcha;
caracterizada porque los medios para generar los diferentes modos de conducción tienen:
- una máquina de estado (20) que utiliza la información de la fase de marcha procedente del dispositivo de selección y las informaciones generadas por los captadores (12) presentes en el vehículo, especialmente de los captadores de velocidad de rotación (Vr) de las ruedas, la velocidad en curva (Vlc) , las aceleraciones lateral y longitudinal (Acx) , la presión del cilindro de mando (Pm) para activar algoritmos, de los cuales algunos son específicos;
- módulos de conducción (30) comprendiendo cada uno (32, 34, 36, 38) un algoritmo que corresponde a estrategias de conducciones asociadas a diferentes estados en la máquina de estado y que definen consignas de conducción del par motor y del frenado de las ruedas.
2. Dispositivo de conducción según la reivindicación 1, caracterizado porque los modos de conducción del sistema consisten en la optimización del punto de funcionamiento del neumático en la indicación esfuerzo longitudinal / proporción de deslizamiento, principalmente en función de:
- la adherencia disponible, estando esta estimación realizada con la ayuda de los captadores de los parámetros de evolución del vehículo y del modo seleccionado por el conductor;
- la velocidad y la aceleración longitudinal del vehículo;
- en viraje, la velocidad en curva y la aceleración lateral del vehículo.
3. Dispositivo de conducción según las reivindicaciones 1 ó 2, caracterizado porque los módulos de conducción (30) tienen un primer módulo (32) que define una estrategia de conducción para terreno o carretera normal, un segundo módulo (34) que define una estrategia para carretera cenagosa, un tercer módulo (36) para carretera arenosa y un cuarto módulo (38) para carretera con nieve.
4. Dispositivo de conducción según las reivindicaciones 2 ó 3, caracterizado porque la máquina de estado (20) así como los módulos (30) de conducción están dispuestos en un calculador (60) del vehículo, por ejemplo en el ESP del vehículo.
5. Dispositivo de conducción según la reivindicación 4, caracterizado porque la máquina de estado (20) así como los módulos (30) de conducción están dispuestos en el ESP.
6. Dispositivo de conducción según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de selección (80) está dispuesto en el salpicadero del vehículo en forma de un botón de elección del modo de vida del vehículo, accesible al conductor.
Patentes similares o relacionadas:
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de control de frenado de un vehículo y método de control de frenado para el mismo, del 23 de Noviembre de 2018, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control de frenado de un vehículo que lleva a cabo frenado por fricción, mediante un dispositivo de frenado por fricción, y frenado regenerativo, […]
Procedimiento de control de la trayectoria de un vehículo con los frenos sin mando del volante de dirección, del 10 de Octubre de 2018, de PSA Automobiles SA: Procedimiento de control de la trayectoria de un vehículo automóvil en ausencia de mando del volante de dirección , que utiliza un sistema de […]
Prueba de una función de control de la trayectoria de un vehículo con los frenos sin mando del volante, del 10 de Octubre de 2018, de PSA Automobiles SA: Procedimiento de prueba de una función de control de la trayectoria de un vehículo automóvil en ausencia de mando de la dirección de este vehículo, que utiliza un sistema […]
Sistema de control de conducción de seguridad y rescate para el cambio de radio de ruedas y el estallido de neumáticos en alta velocidad, del 11 de Octubre de 2017, de Wang, Dehong: Un sistema de control de conducción de seguridad y rescate para el cambio de radio de la rueda y el estallido de neumáticos en alta velocidad, que incluye: un […]
Control de vehículo por modulación de la inclinación, del 22 de Febrero de 2017, de DEKA PRODUCTS LIMITED PARTNERSHIP: Un método para la estabilización delantera-trasera de un vehículo para el movimiento en una dirección especificada sobre una superficie subyacente, el vehículo […]
Instalación de frenado electrohidráulica de vehículo y procedimiento para el manejo de la misma, del 4 de Enero de 2017, de LUCAS AUTOMOTIVE GMBH: Instalación de frenado electrohidráulica de vehículo de motor , comprendiendo un cilindro principal ; un actuador electromecánico para el accionamiento […]
Vehículo de motor y procedimiento para el control de un vehículo de motor, del 29 de Junio de 2016, de AUDI AG: Vehículo de motor que comprende al menos un sistema de asistencia al conductor para el cálculo previo de futuras situaciones de conducción […]