Compensación de fuerza de rozamiento en un sistema eléctrico de direccionamiento.
Un método de hacer funcionar un sistema de direccionamiento de potencia eléctrica,
en el que el sistema de direccionamiento comprende:
- un árbol (2) de direccionamiento, que puede ser acoplado a un volante (1) de direccionamiento,
- una marcha (3) conectada al árbol (2) de direccionamiento y que coopera con una cremallera (4) para hacer funcionar ruedas dirigibles (5) de un vehículo,
- al menos un sensor (6) de par motor para medir un par motor (7) aplicado al árbol (2) de direccionamiento,
- y un servo motor (14) que suministra asistencia de direccionamiento para soportar un esfuerzo de direccionamiento de un conductror, estando conectados el sensor (6) de par motor y el servo motor (14) a una unidad (10, 11) de control,
- en el que la unidad (10, 11) de control calcula un par motor (12) requerido y suministra el par motor (12) requerido como base de suministro de potencia para el servo motor (14), caracterizado porque el método comprende los siguientes pasos:
a) calcular un par motor (30) requerido virtual al menos en base al par motor (7) de árbol de direccionamiento, b) monitorizar continuamente la carga (17) de una cremallera (4), usando la señal de al menos un sensor por medición o estimación directa o indirecta en un observador (10) de estado,
c) monitorizar continuamente la velocidad (23) de motor, usando la señal de al menos un sensor por medición o estimación directa o indirecta en un observador de estado,
d) calcular un valor (127) de compensación primero en base a la derivada de tiempo de la carga (17) de cremallera,
e) combinar en una operación de combinación primera el valor (127) de compensación primera con la velocidad (23) de motor a un valor (227) de compensación de fuerza de rozamiento modificada, que se usa directamente o después de un paso de transformación primero como valor (427) de compensación virtual, que está aumentando con la velocidad de motor decreciente, y que se usa directamente o después de un paso de transformación segundo como un valor (29) de compensación,
f) combinar en una operación de combinación segunda el valor (29) de compensación con el par motor (30) 25 requerido virtual al par motor (12) requerido,
g) proceder con el paso a).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10002484.
Solicitante: THYSSENKRUPP PRESTA AG.
Nacionalidad solicitante: Liechtensein.
Dirección: 9492 Eschen LIECHTENSTEIN.
Inventor/es: PAHOLICS,GÁBOR, SZEPESSY,IRME.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
PDF original: ES-2388245_T3.pdf
Fragmento de la descripción:
Compensación de fuerza de rozamiento en un sistema eléctrico de direccionamiento.
Antecedentes de la invención
La presente invención se refiere a un método para hacer funcionar un aparato de direccionamiento de potencia eléctrica con las características del preámbulo de la reivindicación 1 y a un sistema de direccionamiento de potencia eléctrica con las características del preámbulo de la reivindicación 8.
Los sistemas de direccionamiento y especialmente los sistemas de direccionamiento de potencia eléctrica en vehículos de motor tienen un rozamiento interno. Este rozamiento interno del sistema no es constante, sino que más bien varía bastante mientras que el sistema de direccionamiento está en uso por los cambios de temperatura, cambios de carga y demás. El rozamiento también varía en una escala de tiempo a largo plazo debido a cambios en las superficies de apoyo durante la vida de servicio del sistema de direccionamiento.
Las fuerzas de rozamiento influyen en el esfuerzo de direccionamiento del conductor y del motor de asistencia para girar una rueda del vehículo de motor. De otro modo, las fuerzas de rozamiento influyen en las fuerzas de reacción, que son producidas por el contacto de la rueda con la superficie de la carretera, en el sistema de direccionamiento. Las fuerzas de rozamiento pueden enmascarar las fuerzas de reacción, que llevan al problema de que el sensor de par motor de la columna de direccionamiento no mida correctamente la fuerza de reacción. Como consecuencia, el sistema no aplica correctamente el ángulo de direccionamiento, que es seleccionado por la entrada de conductor a la rueda de direccionamiento. Este efecto puede llevar al problema de que la estabilidad direccional del vehículo no se mantenga suficientemente o se logre sólo con un retraso de tiempo indeseable. Esto pude provocar alteraciones para el conductor.
Descripción de la técnica relacionada
Los siguientes documentos de la técnica anterior sugieren mejoras a este problema.
El documento EP 1848625 B1 propone que a velocidades de vehículo que exceden cierto valor predeterminado, se comprueba si el vehículo está conduciendo recto o no cuando el conductor no aplica ningún par motor a la rueda de direccionamiento. En este caso, se mide un par motor residual en la rueda de direccionamiento lo que es necesario para compensar por cualquier desviación de la dirección recta. El par motor de compensación o el par motor residual se usa como una media de movimiento para compensar cualquier tracción del vehículo en ambas direcciones. Esta solución técnica se basa en un número de señales de sensor, que tienen que ser monitorizadas y procesadas en un procedimiento relativamente complicado. Por otra parte, este sistema lleva a una buena compensación de fuerzas de rozamiento sólo alrededor de la posición central de este sistema de direccionamiento.
El documento DE 102006057084 A1 propone compensar cualquier desviación de esta dirección recta en la posición central del sistema de direccionamiento integrando el par motor que se aplica a la rueda de direccionamiento durante un periodo de tiempo dado. El valor, que se obtiene mediante este procedimiento, se añade al par motor dado que es aplicado por el conductor en cualquier momento. Como en el sistema tratado anteriormente, este sistema de técnica anterior efectivamente compensa las fuerzas de rozamiento sólo en las proximidades de la posición central del sistema de direccionamiento.
Esencialmente lo mismo se aplica al sistema de direccionamiento que se divulga en el documento EP 1860018 A2.
A parte del problema general de compensar fuerzas de rozamiento en un sistema de direccionamiento alrededor de la posición central, también es deseable medir o estimar el rozamiento también para ángulos de direccionamiento que difieren de la posición central y especialmente para compensar tales fuerzas de rozamiento en posiciones no centrales. Esto es especialmente necesario en sistemas de direccionamiento que necesitan reaccionar rápidamente en todas las situaciones de conducción por fuerzas de rozamiento superpuestas que no se conocen correctamente, llevan a tiempos muertos en el sistema de direccionamiento y así a una acción de direccionamiento retrasada. El propio mecanismo de asistencia es un componente del sistema de direccionamiento que se añade al rozamiento interno.
El documento EP 1373051 B1 divulga un concepto de direccionamiento de potencia con control de par motor de columna. En este sistema, se realiza una funcionalidad de compensación de rozamiento inherente, que funciona mejor cuando el par motor de columna de referencia es independiente del par motor de carga de cremallera. En este sistema, se usa un observador para estimar la carga en la cremallera, y se compensa la carga estimada. El rozamiento es una parte de la carga de cremallera, así se compensa el rozamiento también.
Sin embargo, el par motor de columna de direccionamiento de referencia habitualmente no es independiente de la carga y hay una correlación entre la carga y el par motor de columna de referencia. Esta correlación puede ser simplificada como una función lineal. La ganancia entre la carga y el par motor de columna de direccionamiento de referencia define el porcentaje de la carga real, que debería ser sentida por el conductor. Este sentimiento garantiza que el conductor consigue una retroalimentación para la condición de conducción real. Alta ganancia es equivalente a una fuerza de asistencia de direccionamiento baja.
En conducción recta a alta velocidad se usan altas ganancias para mejorar la sensación de carretera. Ahora, si una parte de la carga es rozamiento interno, el conductor siente cada vez más el rozamiento a altas ganancias, lo que deteriora la sensación de direccionamiento.
Es, por lo tanto, un objeto de la presente invención proporcionar un aparato de direccionamiento y un método para hacer funcionar un sistema de direccionamiento en el que el rozamiento interno del sistema de direccionamiento se determina dinámicamente y se compensa en una gran variedad de condiciones de conducción.
Este objeto para la compensación de fuerza de rozamiento se alcanza mediante un método para hacer funcionar un sistema de direccionamiento de potencia eléctrica, en el que el método comprende los siguientes pasos:
a) calcular un par motor (30) requerido virtual al menos en base al par motor (7) de árbol de direccionamiento,
b) monitorizar continuamente la carga (17) de una cremallera (4) , usando la señal de al menos un sensor por medición o estimación directa o indirecta en un observador (10) de estado,
c) monitorizar continuamente la velocidad (23) de motor, usando la señal de al menos un sensor por medición o estimación directa o indirecta en un observador de estado,
d) calcular un valor (127) de compensación primero en base a la derivada de tiempo de la carga (17) de cremallera,
e) combinar en una operación de combinación primera el valor (127) de compensación primera con la velocidad (23) de motor a un valor (227) de compensación de fuerza de rozamiento modificada, que se usa directamente o después de un paso de transformación primero como valor (427) de compensación virtual, que está aumentando con la velocidad de motor decreciente, y que se usa directamente o después de un paso de transformación segundo como un valor (29) de compensación,
f) combinar en una operación de combinación segunda el valor (29) de compensación con el par motor (30) requerido virtual en el par motor (12) requerido,
g) proceder con el paso a) .
El concepto velocidad de motor podría significar la velocidad angular de un rotor del servo motor. En caso de usar un actuador lineal podría ser también la velocidad del movimiento lineal de parte de actuador transladado del servo motor. El movimiento de motor significa el movimiento rotacional de rotor o movimiento de translación de la parte de actuador de servo motor.
Una velocidad de motor puede estar cerca de cero, si el ángulo de direccionamiento de ruedas de carretera accionado por acoplamiento mecánico con motor (rotor o actuador lineal) es menos de un grado/segundo. En caso de servo motor con un rotor, la velocidad de motor puede estar cerca de cero, si la velocidad angular del rotor es menos de 5 grados/segundos.
En general, es obvio que el dispositivo de direccionamiento... [Seguir leyendo]
Reivindicaciones:
1. Un método de hacer funcionar un sistema de direccionamiento de potencia eléctrica, en el que el sistema de direccionamiento comprende:
- un árbol (2) de direccionamiento, que puede ser acoplado a un volante (1) de direccionamiento,
- una marcha (3) conectada al árbol (2) de direccionamiento y que coopera con una cremallera (4) para hacer funcionar ruedas dirigibles (5) de un vehículo,
- al menos un sensor (6) de par motor para medir un par motor (7) aplicado al árbol (2) de direccionamiento,
- y un servo motor (14) que suministra asistencia de direccionamiento para soportar un esfuerzo de direccionamiento de un conductror, estando conectados el sensor (6) de par motor y el servo motor (14) a una unidad (10, 11) de control,
- en el que la unidad (10, 11) de control calcula un par motor (12) requerido y suministra el par motor (12) requerido como base de suministro de potencia para el servo motor (14) ,
caracterizado porque el método comprende los siguientes pasos:
a) calcular un par motor (30) requerido virtual al menos en base al par motor (7) de árbol de direccionamiento,
b) monitorizar continuamente la carga (17) de una cremallera (4) , usando la señal de al menos un sensor por medición o estimación directa o indirecta en un observador (10) de estado,
c) monitorizar continuamente la velocidad (23) de motor, usando la señal de al menos un sensor por medición o estimación directa o indirecta en un observador de estado,
d) calcular un valor (127) de compensación primero en base a la derivada de tiempo de la carga (17) de cremallera,
e) combinar en una operación de combinación primera el valor (127) de compensación primera con la velocidad (23) de motor a un valor (227) de compensación de fuerza de rozamiento modificada, que se usa directamente o después de un paso de transformación primero como valor (427) de compensación virtual, que está aumentando con la velocidad de motor decreciente, y que se usa directamente o después de un paso de transformación segundo como un valor (29) de compensación,
f) combinar en una operación de combinación segunda el valor (29) de compensación con el par motor (30) requerido virtual al par motor (12) requerido,
g) proceder con el paso a) .
2. Método de reivindicación 1, caracterizado porque comprende los siguientes pasos adicionales:
a) transformar la velocidad (23) de motor en un valor (123) de velocidad de motor adoptado,
b) transformar el valor (427) de compensación virtual y el valor (123) de velocidad de motor adoptado en el segundo paso de transformación en el valor (29) de compensación, seleccionando el valor más pequeño de ambos en un selector (26) .
3. Método de una o más reivindicaciones precedentes, caracterizado porque comprende los siguientes pasos adicionales:
a) si el valor (227) de compensación de fuerza de rozamiento modificado excede un valor de compensación máximo de umbral, establecer el valor (427) de compensación virtual en el paso de transformación primero como en el valor de compensación máximo de umbral.
4. Método de una o más reivindicaciones precedentes, caracterizado porque comprende los siguientes pasos adicionales:
a) si la velocidad (23) de motor excede un valor de velocidad máximo de umbral, establecer el valor (427) de compensación virtual a cero.
5. Método de una o más reivindicaciones precedentes, caracterizado porque la primera operación de combinación de la reivindicación 1 es una substracción y/o la segunda operación de combinación de la reivindicación 1 es una adición de los valores de entrada.
6. Método de una o más reivindicaciones precedentes, caracterizado porque se determina un ángulo de direccionamiento de ruedas dirigibles y el valor (29) de compensación depende del ángulo de direccionamiento, de manera que el valor (29) de compensación es mayor en ángulos de direccionamiento cercanos al centro del sistema
de direccionamiento, mientras que el valor (29) de compensación decrece con ángulos de direccionamiento en aumento en ambos lados.
7. Método de una o más reivindicaciones precedentes, caracterizado porque el ángulo de direccionamiento de las ruedas dirigibles está determinado y porque está comprobado tanto si este ángulo ha sido cambiado bajo la influencia del par motor (12) requerido como si no que es corregido por el valor (29) de compensación, en el que este cambio tiene que ser detectado dentro de un marco de tiempo predefinido desde la aplicación del valor (29) de compensación, y que el valor (29) de compensación para este ángulo de direccionamiento o para todo el intervalo de ángulo de direccionamiento puede ser ajustado para minimizar este cambio.
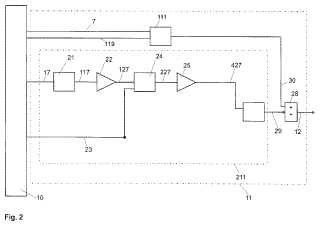
8. Una unidad de controlador para un sistema de direccionamiento de potencia eléctrica en el que la unidad comprende un dispositivo (111) de controlador básico para calcular un par motor (30) requerido virtual en base a un par motor (7) de columna de direccionamiento y otros parámetros (119) , caracterizado porque la unidad comprende además:
una entrada para una carga (17) de cremallera, que es medida directa o indirectamente o estimada por un observador de estado,
un dispositivo (21) de derivación para calcular una derivada de tiempo de dicha carga (17) de cremallera,
una ganancia primera (22) , que está conectada eléctricamente a dicho dispositivo (21) de derivación para adoptar la carga (117) de cremallera derivada a un valor (127) de compensación primero,
una entrada para una velocidad (23) de motor, medida directa o indirectamente o estimada en un observador de estado,
un combinador (24, 124) , preferido en la forma de un substractor, que está conectado eléctricamente a dicha ganancia primera y dicha entrada para la velocidad (23) de motor, que calcula un valor (227) de compensación de fuerza de rozamiento como diferencia de dicho valor (127) de compensación y la velocidad (23) de motor,
una ganancia segunda (25) , que está conectada eléctricamente a dicho combinador (24, 124) , preferido a un substractor, para adoptar el valor (227) de compensación de fuerza de rozamiento directa o indirectamente a un valor (427) de compensación virtual,
una ganancia tercera (27) , que está conectada eléctricamente a dicha entrada para la velocidad (23) de motor para adoptar la velocidad (23) de motor como un valor (123) de velocidad de motor,
un selector (26) , que está conectado eléctricamente a dicha ganancia segunda (25) y dicha ganancia tercera (27) para seleccionar el máximo del valor (123) de velocidad de motor y el valor (427) de compensación virtual como un valor (29) de compensación,
un dispositivo (28) de adición, que está conectado eléctricamente a dicho selector (26) y dispositivo (111) de controlador básico, para añadir el valor (29) de compensación y el par motor (30) requerido virtual como un par motor requerido que puede ser suministrado a un dispositivo adicional que controla un motor eléctrico para el sistema de direccionamiento de potencia eléctrica.
9. La unidad controladora de la reivindicación 8, caracterizada porque la unidad (10, 11) de control comprende un observador (10) de estado para estimar una carga (17) de cremallera momentánea usando las señales de al menos un sensor de par motor.
10. La unidad controladora de una o más de las reivindicaciones 8-9, caracterizada porque un filtro de paso bajo provisto entre el sensor de par motor de columna de direccionamiento y la unidad de control, en el que un umbral de frecuencia del filtro de paso bajo está entre 1 Hz y 16 Hz, ambos incluidos.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]