VEHÍCULO QUE COMPRENDE MEDIOS PARA DETERMINAR LA PENDIENTE EN LA QUE SE MUEVE.
Un vehículo que comprende un motor (12), un embrague (E), ruedas (22),
medios de control de la velocidad de rotación de las ruedas y medios de medición de la pendiente del vehículo que miden la aceleración del vehículo que rueda dicha pendiente, a motor (12) desembragado, caracterizado porque comprende medios de tratamiento (24) que calculan la pendiente con respecto a la horizontal que se determina por la fórmula: = Arc sen (( - g K roll - K v 2 / me) / g) en la que es la aceleración medida del vehículo, g = 9,8 ms -2 , K roll es la resistencia del vehículo al rodamiento, K es la resistencia aerodinámica del vehículo, v es la velocidad del vehículo y me es la masa calculada del vehículo
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07112056.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: WERNERSTRASSE 1 70442 STUTTGART ALEMANIA.
Inventor/es: BOUCHARD,CHRISTOPHE.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Julio de 2007.
Clasificación Internacional de Patentes:
- B60T8/172 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Determinación de los parámetros de control utilizados para la regulación, p.ej. por cálculos que implican parámetros medidos o detectados.
- G01G19/08C
Clasificación PCT:
- B60T8/172 B60T 8/00 […] › Determinación de los parámetros de control utilizados para la regulación, p.ej. por cálculos que implican parámetros medidos o detectados.
- B60T8/1755 B60T 8/00 […] › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
- B60T8/24 B60T 8/00 […] › que responden a la inclinación del vehículo o su cambio de dirección, p. ej. en un viraje.
- B60W30/02 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Control de la estabilidad en la conducción del vehículo.
- G01G19/08 FISICA. › G01 METROLOGIA; ENSAYOS. › G01G DETERMINACION DEL PESO. › G01G 19/00 Aparatos o métodos de pesada adaptados a fines particulares no previstos en los grupos G01G 11/00 - G01G 17/00. › para incorporación en vehículos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Campo de la Invención
Esta invención se refiere a un vehículo de acuerdo con el preámbulo de la reivindicación 1.
Un vehículo de este tipo se conoce del documento DE 197 28769 A1.
Los vehículos automóviles actuales están equipados con sistemas de ayuda a la conducción, particularmente 5 de anti-bloqueo de ruedas (ABS), de control de la trayectoria (ESP) y/o de anti-derrape de las ruedas motrices (ASR), que, en función de las circunstancias, son susceptibles de modular el esfuerzo de frenado aplicado a cada rueda del vehiculo o de generar un esfuerzo de frenado.
Los sistemas de control de la trayectoria se diseñan, en particular, para calcular en tiempo real y durante el rodaje, la carga del vehículo, es decir, su peso total, para tener en cuenta la carga calculada en el ajuste de las 10 intervenciones realizadas.
No obstante, el cálculo de la carga depende del cálculo de la pendiente de la vía de la carretera sobre la que circula el vehículo y actualmente este cálculo de la pendiente es poco preciso, siendo un medio conocido equipar al vehículo con un sensor de inclinación, lo que presenta el inconveniente de aumentar el coste del sistema y su complejidad. 15
La invención tiene por objeto evitar estos inconvenientes, gracias a un procedimiento de determinación de la pendiente que sea simple, eficaz y económico.
En este sentido, la invención tiene por objeto un vehículo de acuerdo con la reivindicación 1.
La determinación de la pendiente consiste en medir la variación de la velocidad del vehículo sobre la pendiente con motivo de un desacoplamiento entre el motor y la transmisión unida a las ruedas motrices del vehículo y descontar 20 de esta variación un valor calculado de la pendiente por comparación de esta variación con curvas de calibración pre-establecidas o, ventajosamente, por cálculo a partir de un módulo matemático.
Este procedimiento permite una determinación relativamente precisa y rápida de la pendiente de la vía de la carretera a partir de informaciones que están disponibles y cuya adquisición no requiere la instalación de un sensor suplementario. 25
Ventajosamente, la variación de la velocidad del vehículo sobre la pendiente se determina con motivo de un cambio de relación de transmisión, durante el intervalo de tiempo correspondiente al desacoplamiento entre el motor y las ruedas motrices.
De acuerdo con otra característica de la invención, este procedimiento también consiste en determinar, ventajosamente por cálculo, la masa del vehículo que se desplaza sobre la pendiente. 30
Ventajosamente, este valor calculado de la pendiente se utiliza después para corregir el valor calculado de la carga del vehículo.
Este mejor cálculo de la carga del vehículo, combinado con el cálculo de la pendiente, permite un funcionamiento de los sistemas de tipo ABS, ESP y ASR, que es más preciso y está mejor adaptado a las condiciones de desplazamiento del vehículo. 35
En el modo de realización preferida de la invención, la variación de la velocidad del vehículo se determina a partir de informaciones proporcionadas por el velocímetro de ese vehículo, o ventajosamente por los sensores de velocidad de rotación de las ruedas.
El procedimiento también consiste en determinar los momentos en los que el motor de desacopla de las ruedas motrices a partir de información proporcionada por el calculador del dispositivo de control de la trayectoria ESP, el 40 calculador del motor de inyección u otro.
La presente invención tiene por objeto un vehículo que comprende un motor, un embrague (E), ruedas y medios de control de la velocidad de rotación de las ruedas caracterizado por que comprende medios de medición de la pendiente del vehículo que miden la aceleración del vehículo que rueda sobre dicha pendiente, a motor desembragado y porque comprende medios de tratamiento que calculan la pendiente con respecto a la horizontal que 45 se determina por la fórmula
= Arc sen (( - g K roll – K v2 / me) / g)
en la que es la aceleración medida del vehículo, g = 9,8 ms-2, K roll es la resistencia del vehículo al rodamiento, K es la resistencia aerodinámica del vehículo, v es la velocidad del vehículo y me es la masa calculada del vehículo.
La presente invención también tiene por objeto un vehículo caracterizado por que comprende medios de determinación de la masa m del vehículo en función de la pendiente medida.
La presente invención también tiene por objeto un vehículo caracterizado por que comprende una unidad hidráulica de mando de frenos hidráulicos dispuestos a nivel de las ruedas, que garantiza la disminución individual de la velocidad de rotación de las ruedas cuando esta sobrepasa la velocidad deseada para que el vehículo siga la trayectoria 5 deseada por el conductor.
La invención se comprenderá mejor, y en la lectura de la siguiente descripción, aparecerán más claramente otras características, detalles y ventajas de la misma , realizada como ejemplo en referencia a los dibujos adjuntos en los que:
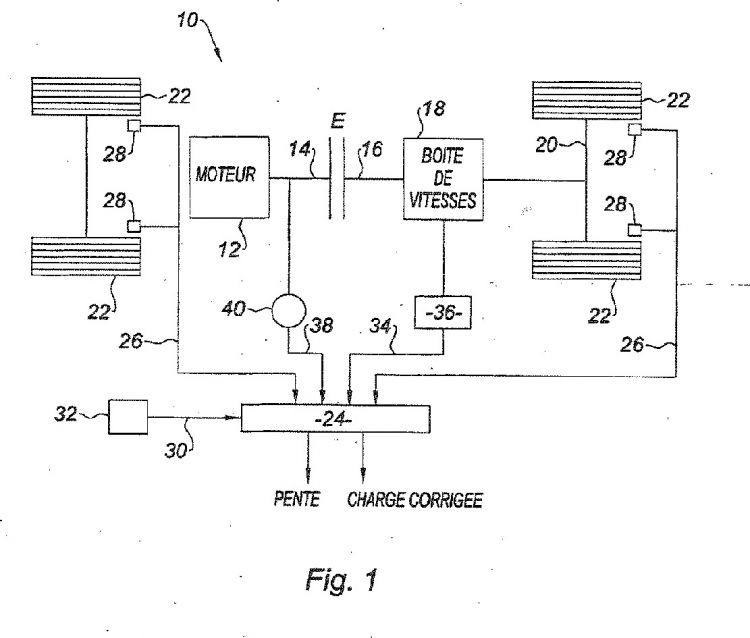
La figura 1 representa, en forma de diagramas de bloque, la estructura de un vehículo automóvil provisto de un 10 medio de determinación de la pendiente de acuerdo con la invención;
La figura 2 es un organigrama que representa las diferentes etapas del procedimiento de acuerdo con invención.
En la figura 1, la referencia 10 representa, de manera general, un vehículo automóvil, cuyo motor de combustión interna 12 acciona, por medio de un embrague E que une su árbol de salida 14 con el árbol de entrada 16 15 de una caja de cambios 18 y de una transmisión 20, las ruedas 22 del vehículo.
Los medios de determinación de la pendiente de acuerdo con la invención comprenden medios 24 de tratamiento de la información, que reciben una señal de entrada 26 de la velocidad del vehiculo proporcionada por un sensor 28 de velocidad de rotación de las ruedas 22, una señal 34 de apertura del embrague, proporcionada por medios 36 de cambio de relación de la transmisión (que el conductor del vehículo puede controlar o que pueden automatizarse 20 en el caso de una caja de cambios automática) y/o una señal 38 de velocidad de rotación del árbol de salida del motor, proporcionada por un sensor apropiado 40.
Ventajosamente, el calculador ESP, asociado por otro lado a una unidad hidráulica provista, de manera conocida, de una bomba hidráulica y de válvulas unidas a los frenos, desempeña la función de los medios 24 de tratamiento de información. 25
La determinación de un intervalo de tiempo durante el cual el motor está desacoplado de las ruedas motrices puede realizarse en efecto, a partir de informaciones relativas al estado de los medios 16 del cambio de relación de la transmisión, o por comparación de la velocidad 26 del vehículo y de la velocidad de rotación del motor, indicando una relación no lineal de la variación de estas velocidades que el motor está desacoplado de las ruedas motrices de vehículo. 30
La variación de la velocidad del vehículo durante el intervalo de tiempo en el que el embrague E está abierto, es un dato que permite calcular la pendiente de la vía de la carretera sobre la que se desplaza el vehículo.
De hecho, la suma de las fuerzas aplicadas al vehículo F es igual al producto de la masa m del vehículo en carga por la aceleración :
F = m. 35
La suma de las fuerzas es igual a la suma de la resistencia al rodamiento F roll drag, de la resistencia aerodinámica F aero y la fuerza F slope (pendiente) resultante de la aceleración de la gravedad sobre una pendiente de ángulo con respecto a la horizontal.
F = mg K roll
siendo g igual a 9,8 m-2 40
siendo K roll una constante del vehículo que puede medirse durante el diseño del vehículo.
F aero = Kv2
siendo K una constante aerodinámica del vehículo y v la velocidad del vehículo
F slope = mgsen
Se deduce que 45
= arc sen (( - g K roll – K v2 / m) / g)
A primera vista, se trata de una indeterminación en...
Reivindicaciones:
1. Un vehículo que comprende un motor (12), un embrague (E), ruedas (22), medios de control de la velocidad de rotación de las ruedas y medios de medición de la pendiente del vehículo que miden la aceleración del vehículo que rueda dicha pendiente, a motor (12) desembragado, caracterizado porque comprende medios de tratamiento (24) que calculan la pendiente con respecto a la horizontal que se determina por la fórmula:
= Arc sen (( - g K roll – K v2 / me) / g) 5
en la que es la aceleración medida del vehículo,
g = 9,8 ms-2, K roll es la resistencia del vehículo al rodamiento, K es la resistencia aerodinámica del vehículo, v es la velocidad del vehículo y me es la masa calculada del vehículo.
2. Un vehículo de acuerdo con la reivindicación 1, caracterizado porque comprende medios de determinación de la masa m del vehículo en función de la pendiente medida. 10
3. Un vehículo de acuerdo con la reivindicación 1 ó 2 caracterizado porque comprende una unidad hidráulica de mando de frenos hidráulicos dispuestos a nivel de las ruedas (22), que garantiza la disminución individual de la velocidad de rotación de las ruedas (22) cuando esta sobrepasa la velocidad deseada para que el vehículo siga la trayectoria deseada por el conductor.
Patentes similares o relacionadas:
 Estimación de rigidez de neumático y estimación de fricción de carretera, del 29 de Enero de 2020, de NIRA DYNAMICS AB: Procedimiento de determinación de al menos uno de entre un potencial de fricción y una rigidez de neumático de una rueda de un vehículo, comprendiendo […]
Estimación de rigidez de neumático y estimación de fricción de carretera, del 29 de Enero de 2020, de NIRA DYNAMICS AB: Procedimiento de determinación de al menos uno de entre un potencial de fricción y una rigidez de neumático de una rueda de un vehículo, comprendiendo […]
Método de derivación y aparato de derivación de aceleración lateral, y controlador de freno de vehículo de manillar, del 1 de Enero de 2020, de NISSIN KOGYO CO., LTD.: Un método de control de freno antibloqueo para un vehículo de manillar (V), incluyendo el método: detectar una aceleración (S15) del vehículo de […]
Sistema de accionamiento eléctrico de un vehículo ferroviario con acumulador de energía electroquímica y eléctrica, del 14 de Noviembre de 2019, de Siemens Mobility GmbH: Sistema de accionamiento eléctrico de un vehículo ferroviario, donde el sistema de accionamiento comprende un acumulador de energía eléctrica y un acumulador de energía […]
Método para controlar y recuperar la adherencia de las ruedas de un eje controlado de un vehículo ferroviario, del 6 de Noviembre de 2019, de Faiveley Transport Italia S.p.A: Método para controlar y posiblemente recuperar la adherencia de las ruedas (W) de un eje (A) controlado de un vehículo ferroviario, que comprende las etapas de […]
Dispositivo de control de freno para vehículos con manillar, del 2 de Octubre de 2019, de NISSIN KOGYO CO., LTD.: Un dispositivo de control de freno para vehículos con manillar , incluyendo el dispositivo de control de freno: una unidad […]
SISTEMA DE CONTROL DE UN VEHÍCULO, del 12 de Septiembre de 2019, de ALVAREZ TRONCOSO, Pablo: Sistema de control de un vehículo que comprende: - una célula inteligente con capacidad de almacenaje y transmisión de información del estado del […]
Un método para el método de ajuste dinámico de los parámetros de funcionamiento de un vehículo, del 24 de Mayo de 2019, de PIAGGIO & C. S.P.A.: Un método de ajuste dinámico mientras se conduce un vehículo de al menos un parámetro de funcionamiento del vehículo, el vehículo […]
Procedimiento para frenar un vehículo, del 9 de Abril de 2019, de Siemens Mobility GmbH: Procedimiento para operar un vehículo, el cual presenta los siguientes pasos del procedimiento: - determinación de la masa total del vehículo en función […]