VEHÍCULO INDUSTRIAL CON MECANISMO DE TRASLACIÓN.
Vehículo industrial con un mecanismo de traslación que acciona una sola rueda motriz,
que está alojada al mismo tiempo de forma giratoria alrededor de un eje vertical como rueda dirigida, estando dispuesta en al menos un lado de la rueda motriz (12) o en el mismo eje de la rueda motriz una rueda de apoyo (32, 34), y estando apoyada en un vehículo industrial con carga sobre el eje motor dependiente de la carga la rueda motriz (12) mediante una disposición de resortes en el chasis, caracterizado porque la constante de elasticidad de la disposición de resortes (20) está definida de la siguiente manera: Frueda motriz con carga nominal[N] - Frueda motriz sin carga[N] Frueda motriz con carga nominal [N] - Frueda motriz sin carga [N] Csuspensión el. 2[ mm] 10[ mm] siendo F la fuerza de apriete correspondiente de la rueda motriz (12) y presentando la rueda motriz (12) un bandaje inflexible y porque la rueda de apoyo (32, 34) libremente giratoria alrededor de un eje vertical y móvil en la dirección vertical se apoya mediante una disposición de amortiguación por resortes en el chasis
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04028399.
Solicitante: JUNGHEINRICH AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: AM STADTRAND 35 22047 HAMBURG ALEMANIA.
Inventor/es: KRENZIN,MARCEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Diciembre de 2004.
Fecha Concesión Europea: 13 de Octubre de 2010.
Clasificación Internacional de Patentes:
- B66F9/075 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Características o detalles de estructura.
Clasificación PCT:
- B66F9/075 B66F 9/00 […] › Características o detalles de estructura.
Clasificación antigua:
- B66F9/075 B66F 9/00 […] › Características o detalles de estructura.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención se refiere a un vehículo industrial con mecanismo de traslación según el preámbulo de la reivindicación 1 ó 2.
Un vehículo industrial de este tipo ya es conocido por el documento US-A-4,431,084.
En los vehículos industriales, en particular las carretillas de horquilla elevadora, con respecto a la disposición de las ruedas se distingue entre vehículos de tres ruedas, cuatro ruedas o cinco ruedas. En el vehículo de tres ruedas, dos ruedas están realizadas como ruedas de carga de carretillas de horquilla elevadora apoyadas por brazos de ruedas o también como ruedas frontales de las llamadas carretillas de horquilla elevadora con contrapeso. En la zona posterior está alojada sólo una rueda motriz que, además, es giratoria alrededor de un eje vertical para fines de dirección. En los vehículos de cuatro ruedas, en el extremo delantero y posterior están dispuestos, respectivamente, dos ruedas o rodillos, por ejemplo ruedas de carga en los brazos de ruedas, una rueda motriz en el extremo opuesto en la zona de la esquina, así como un rodillo de apoyo al lado de ésta. También aquí la rueda motriz es giratoria alrededor de un eje vertical para fines de dirección. En los vehículos de cinco ruedas, la rueda motriz dirigida se encuentra aproximadamente en el centro de la parte motriz del vehículo industrial y a los dos lados de la rueda motriz está alojado respectivamente un rodillo de apoyo de forma libremente giratoria alrededor de un eje vertical.
La disposición anteriormente descrita de las ruedas en el bastidor de vehículo de vehículos industriales se divide en los siguientes grupos de chasis conocidos:
1. Chasis de tres ruedas – estáticamente determinado:
1.1 Todas las ruedas están unidas al bastidor de forma inmóvil en la dirección vertical; en el confort de la suspensión elástica y amortiguación sólo puede influirse mediante la característica de la suspensión elástica de los neumáticos.
1.2 Las ruedas frontales de las carretillas de horquilla elevadora con contrapeso están alojadas en suspensiones elásticas (DE 10062565 A1).
1.3 La rueda motriz suspendida de forma elástica se descarga de forma proporcional a la carga absorbida (DE 919517).
2. Chasis de cuatro ruedas – estáticamente indeterminado:
2.1 Todas las ruedas están unidas al bastidor de forma inmóvil en la dirección vertical; en el confort de la suspensión elástica y amortiguación sólo puede influirse mediante la característica de la suspensión elástica de los neumáticos y la rigidez de los brazos de ruedas.
2.2 Rodillo de apoyo suspendido de forma elástica en combinación con una rueda motriz no suspendida de forma elástica.
2.3 Rodillo de apoyo amortiguado y suspendido de forma elástica en combinación con una rueda motriz no suspendida de forma elástica (DE 29801892 U1).
2.4 Rodillo de apoyo hidráulicamente solicitado / enclavable en combinación con una rueda motriz no suspendida de forma elástica (DE 19753412).
2.5 Rodillo de apoyo suspendido de forma elástica en combinación con una rueda motriz suspendida de forma elástica (US 6,488,297 B2).
3. Chasis de cuatro ruedas – estáticamente determinado:
3.1 El rodillo de apoyo y la rueda motriz están acoplados cinemáticamente entre sí y son
solicitados mediante un resorte adicional (US
6,488,297 B2).
3.2 La rueda motriz y la rueda de apoyo se encuentran en una unidad de soporte que está dispuesta en un eje de giro de forma oscilante respecto al bastidor base. La unidad de soporte y el bastidor base están acoplados adicionalmente a elementos de resorte (US 6,488,297 B2).
3.3 Las ruedas de un eje del vehículo están conectadas entre sí con manillares e influyen una en otra.
3.4 La unidad de soporte de 3.2 y los manillares
3.3 pueden ajustarse y/o enclavarse geométricamente en función de unos parámetros de servicio.
4. Chasis de cinco ruedas
4.1 Rodillos de apoyo laterales inmóviles en la dirección vertical en combinación con una rueda motriz móvil en la dirección vertical, que a) se aprieta con una fuerza de resorte
constante contra el suelo (US 4,431,084)
b) se aprieta con una fuerza de resorte dependiente de la carga contra el suelo (EP 0209502 B1).
c) se aprieta con una cinemática de elevación dependiente de la carga contra el suelo (DE 3904798 A1 y DE 3904798 C2).
d) se aprieta contra el suelo en función de unos parámetros de servicio (DE 3402495, EP 0329504 B1, GB 2094727).
e) se descarga dependiente de la altura de elevación (DE 3106027 A1).
4.2 Rueda motriz inmóvil en la dirección vertical en combinación con ruedas de apoyo móviles en
la dirección vertical, que una
independientemente de las otras a) se aprietan con una fuerza de resorte constante contra el suelo (EP 0480817, EP
0329504, EP 2606765). b) están en contacto con el suelo con una unidad de amortiguadores (EP 0584704). c) están en contacto con el suelo con una unidad de resortes/amortiguadores.d) se solicitan y/o enclavan hidráulicamente.
4.3 Rueda motriz inmóvil en la dirección vertical en combinación con ruedas de apoyo móviles en la dirección vertical que están conectadas cinemáticamente de forma dependiente a) y se aprietan con una fuerza de resorte
constante contra el suelo. b) están en contacto con el suelo con una unidad de resortes/amortiguadores.
c) que pueden enclavarse con un órgano de ajuste dependiente del recorrido/independiente del recorrido.
d) se aprietan contra el suelo dependientes de la carga con un órgano de ajuste.
La base de todas las configuraciones del chasis es la ponderación de la estabilidad lateral del vehiculo y de la tracción de la rueda motriz. Si tiene mayor importancia la estabilidad lateral, las suspensiones de las ruedas que forman los ejes de inclinación están configuradas de forma rígida; esto conduce tanto en el caso de vehículos de cuatro ruedas como en los de cinco ruedas a una situación de la superficie de contacto de las ruedas estáticamente indeterminable, que conlleva problemas de tracción en la rueda motriz.
Para obtener una carga definida sobre la rueda motriz, los grados de libertad bloqueados del alojamiento de la rueda deben volver a desbloquearse. En el caso de los vehículos de cinco ruedas, esto incluye sustancialmente el movimiento vertical de la suspensión de la rueda motriz y en el caso de los vehículos de cuatro ruedas, como alternativa, la rueda de apoyo lateral móvil
en la dirección vertical. Esto también es válido para acoplamientos cinemáticos de las ruedas de un eje o la realización de ejes oscilantes. Las suspensiones de las ruedas móviles en ladirección vertical se apoyan mediante elementos de resorte
o cilindros hidráulicos en el bastidor del vehículo. Con unidades de ajuste adicionales en los elementos de apoyo anteriormente indicados pueden variarse las cargas correspondientes sobre las ruedas, lo cual influye a su vez en las cargas sobre las ruedas unidas fijamente al bastidor sin movilidad en la dirección vertical. De este modo, al aumentarse la carga sobre la rueda motriz se reduce la carga sobre la rueda de los rodillos de apoyo laterales en el mismo eje; en el caso de los chasis de cuatro ruedas, se influye en las cargas sobre todas las ruedas.
Por lo tanto, la estabilidad lateral se reduce a medida que aumenta la carga sobre la rueda motriz, de modo que la unión rígida en la dirección vertical de las ruedas del chasis del eje oscilante pierde importancia. Existe una determinada carga límite, a partir de la cual es imprescindible la inversión de la suspensión de la rueda de “fija en la dirección vertical” a “móvil en la dirección vertical” y viceversa, puesto que en el caso contrario se ajustan estados de marcha inestables.
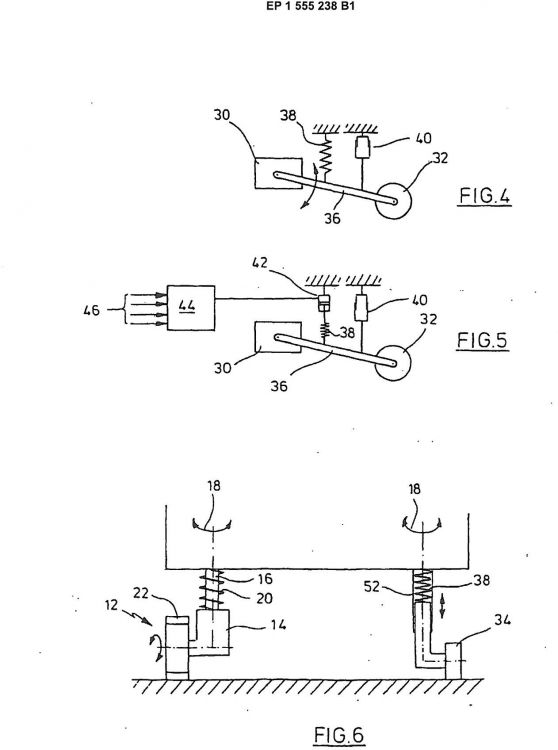
La rueda motriz inmóvil en la dirección vertical se combina con rodillos de apoyo laterales móviles en la dirección vertical, que se apoyan con ayuda de resortes y amortiguadores respecto al bastidor del vehículo para evitar una oscilación dinámica en curvas. Ahora, la parte principal de toda la carga sobre el eje motor descansa en la rueda motriz, la llamada “rueda motriz orientada a la carga” en función de...
Reivindicaciones:
1. Vehículo industrial con un mecanismo de traslación que acciona una sola rueda motriz, que está alojada al mismo tiempo de forma giratoria alrededor de un eje vertical como rueda dirigida, estando dispuesta en al menos un lado de la rueda motriz (12) o en el mismo eje de la rueda motriz una rueda de apoyo (32, 34), y estando apoyada en un vehículo industrial con carga sobre el eje motor dependiente de la carga la rueda motriz (12) mediante una disposición de resortes en el chasis, caracterizado porque la constante de elasticidad de la disposición de resortes (20) está definida de la siguiente manera:
siendo F la fuerza de apriete correspondiente de la rueda motriz (12) y presentando la rueda motriz (12) un bandaje inflexible y porque la rueda de apoyo (32, 34) libremente giratoria alrededor de un eje vertical y móvil en la dirección vertical se apoya mediante una disposición de amortiguación por resortes en el chasis.
2. Vehículo industrial con un mecanismo de traslación que acciona una sola rueda motriz, que está alojada al mismo tiempo de forma giratoria alrededor de un eje vertical como rueda dirigida, estando dispuesta en al menos un lado de la rueda motriz (12) o en el mismo eje de la rueda motriz una rueda de apoyo (32, 34), y estando apoyada en un vehículo industrial con carga sobre el eje motor independiente de la carga la rueda motriz (12) mediante una disposición de resortes (20) en el chasis (10), caracterizado porque la constante de elasticidad de la disposición de resortes está definida de la siguiente manera:
siendo F la fuerza de apriete correspondiente de la rueda motriz (12) y presentando la rueda motriz (12) un bandaje inflexible y porque la rueda de apoyo (32, 34) libremente giratoria alrededor de un eje vertical y móvil en la dirección vertical se apoya mediante una disposición de amortiguación por resortes en el chasis.
3. Vehículo industrial según la reivindicación 1 ó 2, caracterizado porque la disposición de amortiguación por resortes (20) tiene asignada una disposición de amortiguadores (24).
4. Vehículo industrial según la reivindicación 1, 2 ó 3, caracterizado porque una rueda de apoyo dispuesta en el eje de la rueda motriz está provista de una disposición de amortiguadores y porque la disposición de amortiguadores de la rueda de apoyo asume la amortiguación de la rueda motriz.
5. Vehículo industrial según una de las reivindicaciones 1 a 4, caracterizado porque la compresión bajo carga de la disposición de resortes (20) con la carga máxima admisible no es superior a una medida entre 3 y 6 mm.
6. Vehículo industrial según las reivindicaciones 1 a 5, caracterizado porque sobre la rueda de apoyo (32) actúa un órgano de ajuste (42) accionado por fuerza, que es controlable para la variación de la fuerza de contacto del rodillo de apoyo (32) mediante uno o varios parámetros de servicio del vehículo industrial.
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
MONTACARGAS DE ESTRUCTURA COMPACTA, del 21 de Abril de 2020, de EP Equipment Co., Ltd: 1. Montacargas de estructura compacta, compuesto por una carrocería, con una cabina en su parte superior y un asiento en la cabina , la estructura […]
Sistema de posicionamiento de superficies de apriete, del 25 de Marzo de 2020, de CASCADE CORPORATION: Un sistema de control para una mordaza de manejo de carga que se puede montar en un vehículo, teniendo dicha mordaza un par de superficies […]
Sistema de estabilización de máquinas de explotación automotrices, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un método para controlar estabilizadores de tijera de máquinas de explotación automotrices, tales como manipuladores telescópicos o similares, […]
Sistema de detección de obstáculos para una plataforma de trabajo aérea, del 19 de Febrero de 2020, de JLG INDUSTRIES,INC.: Un conjunto de plataforma que comprende: una plataforma de trabajo que incluye un piso de la plataforma y un riel de seguridad que se extiende […]
Telemanipulador con un sistema de blindaje, del 13 de Noviembre de 2019, de Manitou Italia S.r.l: Un telemanipulador que comprende un sistema de blindaje, el cual, a su vez, comprende: una estructura de cabina para dicho telemanipulador […]
Procedimiento y dispositivo de vigilancia de apoyo para carro que comprende un medio estabilizador, del 5 de Noviembre de 2019, de MANITOU BF: Procedimiento de vigilancia de apoyo para carro que comprende un medio estabilizador, caracterizado por que el mencionado procedimiento comprende las etapas: - de bajada […]
 Módulos enchufables amovibles para vehículos de manipulación de materiales, del 30 de Septiembre de 2019, de EP Equipment Co., Ltd: 1. Una carrocería del vehículo y un módulo enchufable del controlador de un vehículo de manipulación de materiales, que comprenden:
una carrocería […]
Módulos enchufables amovibles para vehículos de manipulación de materiales, del 30 de Septiembre de 2019, de EP Equipment Co., Ltd: 1. Una carrocería del vehículo y un módulo enchufable del controlador de un vehículo de manipulación de materiales, que comprenden:
una carrocería […]