SISTEMA Y PROCEDIMIENTO DE CONTROL PARA MANIPULADORES.
Sistema y procedimiento de control para manipuladores.Basado en guantes (5) dotados de sensores,
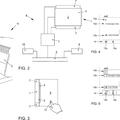
que permite a un operario (6) controlar cualquier manipulador (4) con uno o más grados de libertad, coordinando su movimiento de acuerdo con la magnitud, dirección y sentido de la fuerza aplicada por el operario (6), ejercida sobre la estructura del manipulador (4) o sobre la carga movilizada (406). Dicho sistema de control comprende al menos un guante (5) dotado de sensores, un computador (411), un receptor inalámbrico (412) y unos variadores de frecuencia (413). Cada guante (5) posee en su zona dorsal un sistema de posicionamiento dactilar (2) que mide la flexión y abducción de los cinco dedos, un sistema de posicionamiento espacial (7) que mide la posición y orientación absoluta del guante (5) y por ende de la mano (1) en el espacio, y en su zona palmar un sistema de medición de fuerza (3) que mide las fuerzas aplicadas por el operario (6)
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930173.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: GONZALEZ DE SANTOS,PABLO, PAREDES MADRID,LEONEL.
Fecha de Solicitud: 14 de Mayo de 2009.
Fecha de Publicación: .
Fecha de Concesión: 7 de Noviembre de 2011.
Clasificación PCT:
- G06F3/01 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 3/00 Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz. › Disposiciones de entrada o disposiciones combinadas de entrada y salida para la interacción entre el usuario y el computador (G06F 3/16 tiene prioridad).
Fragmento de la descripción:
Sistema y procedimiento de control para manipuladores.
Objeto de la invención
La presente invención pertenece al campo de los sistemas y dispositivos de medición de fuerza y tensiones en general, y más concretamente a una interfaz de control para manipuladores, robots industriales o grúas que funcionan en colaboración directa con los operarios.
El objeto principal de la presente invención es un sistema de control basado en guantes dotados de sensores, que permitan al operario controlar cualquier manipulador con uno o más grados de libertad, coordinando su movimiento de acuerdo con la magnitud, dirección y sentido de la fuerza aplicada por el operario, ejercida sobre la estructura del manipulador o sobre la carga movilizada.
Antecedentes de la invención
Las grúas y manipuladores son comunes en instalaciones industriales que requieren movilizar cargas elevadas. Típicamente la interfaz de usuario de dichos sistemas consiste en palancas de mandos, botones y más recientemente asideros con sensores de fuerza incorporados tal como se describe en los documentos US 6,738,691 y US 6,204,620. Dichos sistemas son conocidos como "Dispositivos Inteligentes de Ayuda a la Manipulación" (DIAM) y tienen como finalidad proveer de amplificación de potencia humana, logrando consecuentemente mejorar la interfaz de control entre el operario y la grúa en términos de: ergonomía, seguridad y productividad de la planta.
Su arquitectura es muy similar a las grúas tradicionales controladas por botones y palancas de mando, pero incorporan nuevos sensores y elementos de realimentación de esfuerzo destinados a proveer de sensaciones hápticas al operario, así como nuevos algoritmos de control. La arquitectura de los DIAM que funcionan en cooperación directa con el operario, se encuentra en documentos como US 6,813,542 y US 6,928,336 mientras que en el campo de la teleoperación con realimentación de esfuerzo pueden encontrarse documentos como: US 6,184,868, US 6,985,133 y US 5,184,319. La Compañía Virtual Realities con sede en Galveston TX, USA, ha desarrollado dispositivos para teleoperación con realimentación de esfuerzo, tal es el caso del CyberGlove II y CyberGrasp. El CyberGlove II es un guante de datos, (data glove), dotado con goniómetros resistivos. Los guantes de datos son dispositivos que permiten medir los movimientos de los grados de libertad de la mano, dichos movimientos pueden clasificarse en: flexión y abducción de los dedos y rotación de la muñeca. No obstante, la mayoría de los guantes de datos no están dotados de sensores para medir la rotación de la muñeca.
Incorporando al CyberGlove II una Unidad de Medidas Inerciales, UMI, puede obtenerse la posición y orientación de la mano en el espacio y utilizar dicha información para múltiples tareas, una de ellas consiste en controlar robots remotamente. Si además se incorpora el módulo CyberGrasp puede proveerse de realimentación de esfuerzo sobre la mano, lo que mejora significativamente la interfaz hombre-máquina en el sistema teleoperado.
Además de los goniómetros resistivos usados en el CyberGlove II y CyberGrasp, existen otras tecnologías para estimar la flexión y abducción de los dedos. El documento US 5,184,009 emplea fibra óptica y sensores de intensidad colocados convenientemente en las falanges para medir su flexión y abducción. La utilización de fibra óptica para este fin es muy conveniente, dado que puede mimetizarse con facilidad en un guante debido a la propia flexibilidad de la fibra y al poco espacio que ocupa.
El documento "A Survey of Glove-Based Systems and Their Applications" de Dipietro Laura, Sabatini Angelo y Dario Paolo, IEEE Transactions on Systems, Man and Cybernetics, pp. 461-482, hace un recuento tanto de las aplicaciones de los guantes de datos, como de las distintas versiones de los mismos, dicho estudia abarca desde el año 1994 hasta la fecha de publicación del artículo en julio de 2008.
Las aplicaciones de los guantes de datos son muy variadas, algunos de los campos de investigación que comprenden son: diseño y manufactura en la industria, visualización de información en entornos computacionales de diseño gráfico, asistencia en el proceso de reconocimiento de lenguaje para sordomudos, rehabilitación de pacientes afectados por lesiones motrices y en el campo de robótica, los guantes de datos se utilizan para diversos fines tales como: aprendizaje basado en memorización de los movimientos realizados por un humano, control de robots mediante posiciones gestuales de los dedos y control teleoperado de robots en sistemas con o sin realimentación de esfuerzo, para este último caso el documento "Data Glove With a Forcé Sensor" de Tarchanidis Kostas, Lygouras John, IEEE Transactions on Instrumentation and Measurement, pp. 984-989. describe un guante de datos dotado con sensores de fuerza en la zona palmar y en la zona dorsal con un sistema de medición de la flexión de los dedos.
Las interfaces de control para los DIAM que funcionan en cooperación directa con el operario son variadas dependiendo del número de grados de libertad que se desee controlar. En los documentos US 5,865,426 y US 5,915,673 se exponen interfaces de control para los DIAM con un grado de libertad, en ellos se utilizan sensores de fuerza en un asidero para detectar la intención de movimiento del operario, por consiguiente, la velocidad de movimiento del manipulador cambiará proporcionalmente dependiendo de la magnitud de la fuerza aplicada. El movimiento del manipulador es posible solo verticalmente, debido al tipo de manipulador empleado. Mediante la programación de trayectorias predefinidas y usando un manipulador adecuado, puede utilizarse la invención descrita en el documento US 5,915,673 para mover cargas en más de un grado de libertad.
Un aspecto que debe tratarse con sumo cuidado es el estudio de la estabilidad de los DIAM que funcionan en cooperación directa con el operario. Dicho tema se aborda en el documento US 7,043,337 para una grúa suspendida. En dicho DIAM, el sensor de fuerza ha sido reemplazado por otro, que detecta la desviación del cable suspendido de su posición vertical; posteriormente, y de forma proporcional al ángulo de desviación, se origina movimiento en el plano horizontal. Entiéndase que el movimiento se realiza en dos grados de libertad x, y.
El problema de la estabilidad en los DIAM constituye una complicación importante en aquellos sistemas dotados de sensores de fuerza en el elemento final del manipulador. Este tipo de DIAM funciona bajo la modalidad manos en la carga (hands on payload), lo que elimina la necesidad de contar con asideros o botones, basta con que el operario ejerza fuerza sobre el elemento final del manipulador para originar movimiento. Es por ello que este tipo de DIAM provee de las mejoras prestaciones ergonómicas al operario, no obstante, la "no-colocación" de sensores de fuerza y actuadores conlleva a problemas de estabilidad en su operación. La "no-colocación" de sensores y actuadores significa que los actuadores y sensores no residen en la misma ubicación física, encontrándose separados por elementos dinámicos. En el caso de robots, los actuadores están generalmente ubicados en las articulaciones y los sensores de fuerza se encuentran cerca del elemento final, separados de los actuadores por la dinámica de las transmisiones y la dinámica estructural de los eslabones. El artículo "The Interaction of Robots with Passive Environments: Application to Forcé Feedback Control", de Colgate Edward, Hogan Neville, Advanced Robotics 1989, aborda el problema de estabilidad originado por la "no-colocación" de sensores y actuadores.
Por otra parte los sensores de fuerza colocados en los DIAM que funcionan en el modo manos en la carga, requieren de alta resolución para poder detectar la fuerza aplicada por el operario y de un amplio rango dinámico para soportar el peso de la carga, lo que implica usar sensores de elevado costo.
Una versión mejorada del asidero descrito previamente en el documento US 5,915,673 involucra el uso de un guante donde se incorpora un sensor de fuerza que detecta la presión ejercida por el operario sobre el manipulador. Dicha invención se describe en el documento US 6,681,638. El diseño de dicho guante permite al operario mover el manipulador hasta en tres grados de libertad x, y, z. El movimiento se realiza únicamente a través de trayectorias definidas previamente, programadas vía software. El único sensor de fuerza que incorpora el guante, indica al sistema de control del manipulador la rapidez con que debe moverse,...
Reivindicaciones:
1. Sistema de control para manipuladores que permite a un operario (6) controlar el movimiento de un manipulador (4) con uno o más grados de libertad adaptado para manipular una carga (406), ejerciendo presión con una o ambas manos (1) en la dirección de movimiento deseada sobre el manipulador (4) o la carga (406) caracterizado porque el sistema comprende al menos un guante (5) dotado de sensores que recoge información tanto de la posición y orientación del guante (5) como del módulo, dirección y sentido de la fuerza aplicada, un receptor inalámbrico (412) que recibe información del guante (5), un computador (411) asociado al receptor inalámbrico (412), que genera unas consignas de velocidad para cada grado de libertad del manipulador (4), y unos variadores de frecuencia (413) que reciben órdenes del computador (411) para controlar el manipulador (4).
2. Sistema de control para manipuladores de acuerdo con reivindicación 1, caracterizado porque el guante (5) posee en su zona dorsal un sistema de posicionamiento dactilar (2) que mide la flexión y abducción de los cinco dedos.
3. Sistema de control para manipuladores de acuerdo con reivindicación 1, caracterizado porque el guante (5) posee en su zona palmar un sistema de medición de fuerza (3) que mide las fuerzas aplicadas por el operario (6) sobre el manipulador (4) o sobre la carga (406) movilizada.
4. Sistema de control para manipuladores de acuerdo con reivindicación 2, caracterizado porque el sistema de posicionamiento dactilar (2) está constituido por una unidad de comunicación (210) que emite la información recogida por el guante (5) al receptor inalámbrico (412) y una caja opaca (204) que presenta en su interior unos emisores de luz instalados, los cuales están conectados a unos segmento de fibra óptica (7) que contienen unos sensores de intensidad (201, 203, 206, 208, 211,213, 215, 223, 225).
5. Sistema de control para manipuladores de acuerdo con reivindicación 4, caracterizado porque la unidad de comunicación (210) es inalámbrica.
6. Sistema de control para manipuladores de acuerdo con reivindicación 4, caracterizado porque la unidad de comunicación (210) utiliza, para el envío de la información recogida por el/los guantes (5), unos medios seleccionados entre:
ondas electromagnéticas,
un cable,
fibra óptica,
señales de infrarrojo, y
señales ultrasónicas.
7. Sistema de control para manipuladores de acuerdo con reivindicación 4, caracterizado porque la caja opaca (204) contiene adicionalmente un convertidor analógico digital.
8. Sistema de control para manipuladores de acuerdo con reivindicaciones 4 ó 7, caracterizado porque la caja opaca (204) contiene en su interior seis emisores de luz conectados con seis segmentos de fibra óptica (202, 209, 219, 220, 221, 222).
9. Sistema de control para manipuladores de acuerdo con reivindicación 4, caracterizado porque el sistema de posicionamiento dactilar (2) presenta veintiún sensores de intensidad (201, 203, 206, 208, 211,213, 215, 223, 225).
10. Sistema de control para manipuladores de acuerdo con una cualquiera de las reivindicaciones 2, 4 ó 9 caracterizado porque el sistema de posicionamiento espacial (7) dispone adicionalmente de una Unidad de Medidas Inerciales, (UMI), (701) que permite posicionar y orientar la mano (1) en un espacio de tareas de hasta seis dimensiones, x, y, z, guiñada, cabeceo y balanceo.
11. Sistema de control para manipuladores de acuerdo con reivindicación 10, caracterizado porque la Unidad de Medidas Inerciales (701) está ubicada en el plano formado por la zona dorsal del guante (5).
12. Sistema de control para manipuladores de acuerdo con una cualquiera de las reivindicaciones 10 ó 11, caracterizado porque la Unidad de Medidas Inerciales (701) está dotada de medios seleccionados entre:
acelerómetros y giroscopios,
emisores y receptores infrarrojos,
emisores y receptores de ultrasonido, y
sistema de posicionamiento global mediante satélites que orbitan en torno a la tierra.
13. Sistema de control para manipuladores de acuerdo con reivindicación 3, caracterizado porque el sistema de medición de fuerza (3) comprende una unidad de medición de resistencia (304) y una serie de sensores de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314) distribuidos uniformemente en toda la superficie palmar.
14. Sistema de control para manipuladores de acuerdo con reivindicación 13, caracterizado porque el sistema de medición de fuerza (3) dispone de veintiséis sensores de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314).
15. Sistema de control para manipuladores de acuerdo con una cualquiera de las reivindicaciones 13 ó 14, caracterizado porque cada sensor de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314) presenta al menos un par de terminales (302) cuya conductividad cambia proporcionalmente conforme la magnitud de la fuerza aplicada.
16. Sistema de control para manipuladores de acuerdo con reivindicación 15, caracterizado porque los terminales (302) se encuentran dentro de unas envolturas (303).
17. Sistema de control para manipuladores de acuerdo con reivindicación 1, caracterizado porque el manipulador (4) incorpora unos actuadores (401, 402, 403 y 404) que generan el movimiento de la carga (406) en hasta tres grados de libertad cuando el operario (6) ejerce presión con una sola mano (1), y en hasta seis grados de libertad cuando el operario (6) ejerce presión con ambas manos (1).
18. Sistema de control para manipuladores de acuerdo con una cualquiera de las reivindicaciones 1 ó 17, caracterizado porque el manipulador (4) incorpora un detector de contacto (422) para evitar movimientos involuntarios del manipulador (4).
19. Sistema de control para manipuladores de acuerdo con reivindicación 18, caracterizado porque el detector de contacto (422) es de un tipo seleccionado entre:
detector de contacto (422) electromagnético, y
detector de contacto (422) electrostático.
20. Sistema de control para manipuladores de acuerdo con reivindicación 2, caracterizado porque el sistema de posicionamiento dactilar (2) dispone para la medición del arco palmar, flexión y abducción de los cinco dedos, de medios seleccionados entre:
goniómetros resistivos,
electrogoniómetros,
sensores de efecto hall,
sensores capacitivos,
sensores de inducción magnética,
elastómeros conductores piezorresistivos, y
sistema de cámaras instaladas en los linderos del espacio de trabajo del operario (6).
21. Sistema de control para manipuladores de acuerdo con una cualquiera de las reivindicaciones 13, 14 ó 15 caracterizado porque el sistema de medición de fuerza (3) dispone para la medición de las fuerzas aplicadas de sensores de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314) seleccionados entre:
sensores piezorresistivos,
galgas extensiométricas, y
contactos eléctricos.
22. Procedimiento de control para manipuladores para el sistema de control descrito en una cualquiera de las reivindicaciones 1-21, cuando se emplea un solo guante (5) caracterizado porque comprende las siguientes etapas:
- comprobación de si el detector de contacto (422) del manipulador (4) está activado,
- inhabilitación para controlar el manipulador (4) en caso de que el detector de contacto (422) no esté activado,
- reconstrucción de la posición y orientación de la mano (1) en el espacio en caso de que el detector de contacto (422) sí esté activado,
- lectura de los sensores de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314) instalados en el guante (5),
- generación de los vectores de fuerza individuales de cada sensor de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314),
- cálculo de la suma vectorial de los vectores de fuerza individuales para generar el vector fuerza resultante Fr (409),
- aplicación de la ley proporcional Vr = k • Fr para generar los perfiles de velocidad correspondientes de cada grado de libertad,
- transmisión de cada perfil de velocidad al variador de frecuencia (413) correspondiente para generar movimiento en el manipulador (4) en hasta tres grados de libertad.
23. Procedimiento de control para manipuladores para el sistema de control descrito en una cualquiera de las reivindicaciones 1-21, cuando se emplean dos guantes (5) caracterizado porque comprende las siguientes etapas:
- comprobación de si el detector de contacto (422) del manipulador (4) está activado,
- inhabilitación para controlar el manipulador (4) en caso de que el detector de contacto (422) no esté activado,
- reconstrucción de la posición y orientación de las manos (1) izquierda y derecha en caso de que el detector de contacto (422) sí esté activado,
- lectura de los sensores de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314) instalados en cada uno de los dos guantes (5),
- generación de los vectores de fuerza individuales de los sensor de fuerza (301, 305, 306, 307, 308, 309, 310, 312, 313, 314) de cada guante (5),
- cálculo de la suma vectorial de los vectores de fuerza individuales para generar el vector de fuerza resultante de cada guante (5), Fri, Frd,
- comprobación de si alguno de los dos vectores de fuerza Fri, Frd son iguales a cero,
- determinación de los vectores directores ri, rd de cada vector de fuerza resultante en caso de que los dos vectores de fuerza Fri, Frd sean distintos de cero,
- aplicación de la ley proporcional Vr = k • Fr para generar los perfiles de velocidad correspondientes para cada grado de libertad, en caso de que alguno de los dos vectores de fuerza Fri, Frd sean iguales a cero,
Patentes similares o relacionadas:
SISTEMA Y DISPOSITIVO PARA GENERAR ÁREAS DE TRABAJO EN SUPERFICIES INERTES O INACTIVAS A TRAVÉS DE UNA MATRIZ O MALLA DE SENSORES COMBINADOS, del 29 de Julio de 2020, de GONZÁLEZ QUINTINO, Jesús: Sistema y dispositivo para generar áreas de trabajo en superficies inertes o inactivas a través de matriz de sensores combinados. Matriz o malla de sensores […]
Aparato para realidad aumentada, del 24 de Junio de 2020, de Veeride Ltd: Un accesorio configurado para montarse en una pantalla de presentación visual de un dispositivo de mano con el fin de proyectar la información presentada visualmente […]
Aprovechamiento de un apretón de manos físico en pantallas montadas en la cabeza, del 24 de Junio de 2020, de QUALCOMM INCORPORATED: Un procedimiento de gestión de información para un dispositivo de interfaz , comprendiendo dicho procedimiento : detectar […]
 Procedimiento para la puesta a disposición de un dispositivo de mando en un vehículo y dispositivo de mando para un vehículo, del 24 de Junio de 2020, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para la puesta a disposición de un dispositivo de mando en un vehículo en el que
- un dispositivo de control genera datos gráficos […]
Procedimiento para la puesta a disposición de un dispositivo de mando en un vehículo y dispositivo de mando para un vehículo, del 24 de Junio de 2020, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para la puesta a disposición de un dispositivo de mando en un vehículo en el que
- un dispositivo de control genera datos gráficos […]
Unidad de mando para un vehículo, del 10 de Junio de 2020, de BEHR-HELLA THERMOCONTROL GMBH: Unidad de mando para un vehículo, en particular sistema de infoentretenimiento, para controlar diversos componentes de un vehículo, con - una carcasa con un […]
SISTEMA Y MÉTODO PARA GESTIONAR PERSONAL DE OPERACIÓN EN ENTORNOS CRÍTICOS, del 20 de Mayo de 2020, de UNIVERSIDAD POLITECNICA DE MADRID: La presente invención se refiere a un método y un sistema para gestionar el personal de operación de una infraestructura compleja. Comprende unos primeros […]
Procedimiento de funcionamiento de un sistema de realidad virtual y sistema de realidad virtual, del 13 de Mayo de 2020, de AUDI AG: Procedimiento de funcionamiento de un sistema de realidad virtual , en el que se visualiza un vehículo automóvil virtual desde una posición de observación […]
Detección de reposo usando un acelerómetro, del 6 de Mayo de 2020, de QUALCOMM INCORPORATED: Un procedimiento para reconocer el movimiento de un dispositivo móvil que comprende: medir un nivel de vibración de aceleración de dicho dispositivo móvil […]