SISTEMA DE SUPERVISIÓN DE UNA HERRAMIENTA PARA LA COLOCACIÓN DE ELEMENTOS DE FIJACIÓN.
Un dispositivo de supervisión (22) para utilizarlo con una herramienta para la colocación de elementos de fijación (11) para la colocación de elementos de fijación del tipo que comprende una envoltura y un mandril al cual se le aplica progresivamente una fuerza relativa creciente para desplazar progresivamente las posiciones relativas del mandril y la envoltura para deformar de ese modo la envoltura,
herramienta la cual comprende un mecanismo de disparo de la herramienta (14), medios que están en contacto con la envoltura (18) para estar en contacto con la envoltura, medios de agarre del mandril (17) para agarrar el mandril y medios de aplicación de fuerza para aplicar una fuerza creciente de forma progresiva a los medios de agarre del mandril con respecto a los medios que están en contacto con la envoltura, para desplazar progresivamente de ese modo el mandril con respecto a la envoltura, los medios de aplicación de la fuerza comprendiendo un pistón hidráulico (16), dispositivo de supervisión el cual comprende: - un adaptador del pistón (23) adaptado para ser colocado entre los medios agarre del mandril (17) y el pistón hidráulico (16), para desplazarse con los medios de agarre del mandril (17) y el pistón hidráulico (16); y - un cuerpo del conjunto (24) que se puede unir a la herramienta (11) entre los medios de aplicación de la fuerza y los medios que están en contacto con la envoltura (18), dicho cuerpo del conjunto (24) transportando un sensor de la fuerza (33) para detectar la fuerza aplicada por los medios de aplicación de la fuerza a los medios de agarre del mandril (17) con respecto a los medios que están en contacto con la envoltura (18); caracterizado porque dicho cuerpo del conjunto (24) también transporta un sensor de la carrera sin contacto (35) para detectar la posición de los medios de agarre del mandril (17) con relación a los medios que están en contacto con la envoltura (18), el sensor de la carrera (35) funcionando sin contacto físico con los medios de agarre del mandril (17) o cualquier pieza de la herramienta o conjunto que se desplace con ella
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2006/003419.
Solicitante: AVDEL UK LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: PACIFIC HOUSE, 2 SWIFTFIELDS WATCHMEAD INDUSTRIAL ESTATE WELWYN GARDEN CITY HERTFORDSHIRE AL7 1LY REINO UNIDO.
Inventor/es: KING,RICHARD.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Septiembre de 2006.
Clasificación Internacional de Patentes:
- B21J15/28B
Clasificación PCT:
- B21J15/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21J FORJADO; MARTILLADO; PRENSADO DE METALES; REMACHADO; HORNOS DE FORJA (laminado de metales B21B; fabricación de productos particulares por forjado o prensado B21K; chapeado B23K; tratamiento o acabado de superficies por martillado B23P 9/04; aumento de la compacidad de superficies por chorro de materiales en partículas B24C 1/10; características generales de las prensas, prensas para compactar los residuos B30B; hornos en general F27). › B21J 15/00 Remachado. › Dispositivos de control especialmente adaptados a las máquinas de remachar, no limitados a alguno de los subgrupos precedentes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2359580_T3.pdf
Fragmento de la descripción:
La invención se refiere a un sistema de supervisión para una herramienta de colocación de elementos de fijación y más específicamente a un sistema de supervisión de la fuerza y la carrera para una herramienta para la colocación de elementos de fijación de rotura del vástago, por ejemplo, remaches de rotura del vástago. Brevemente, un elemento de fijación de este tipo comprende una envoltura metálica que se puede de forma sustancialmente cilíndrica que contiene en el interior de su taladro un mandril de metal más resistente, el mandril comprendiendo un vástago con una cabeza radialmente alargada en un extremo y adyacente a un extremo de la envoltura, el otro extremo (el extremo de cola) del mandril sobresaliendo del otro extremo de la envoltura. Los elementos de fijación de este tipo son conocidos por aquellas personas expertas en la técnica y están ampliamente disponibles comercialmente bajo las marcas comerciales registradas AVEX, MONOBOLT, HEMLOK y AVDELOK.
Como es muy conocido, una herramienta de colocación adecuada comprende una tobera para entrar en contacto con el otro extremo anteriormente mencionado de la envoltura del elemento de fijación y medios de agarre del mandril para agarrar el extremo de cola anteriormente mencionado que sobresale del mandril. Cuando se inserta un elemento de fijación dentro de una abertura adecuada en una pieza de trabajo que comprende dos o más elementos que se van a remachar juntos, la herramienta de colocación se ofrece al elemento de fijación de modo que el extremo de cola del mandril entra en los medios de agarre y la tobera de la herramienta entra en contacto con el extremo de la envoltura. La herramienta es accionada para extraer los medios de agarre con respecto a la tobera, los medios de agarre agarran el mandril y aplican progresivamente una tensión creciente al mismo con respecto a la envoltura, la fuerza de reacción en la envoltura estando soportada por la tobera de la herramienta. Esto causa que el mandril sea progresivamente desplazado con respecto a la envoltura, de modo que la cabeza del mandril entra en la envoltura y causa que la última se expanda radialmente más allá de la cara remota de la pieza de trabajo y la tobera de la herramienta expande radialmente el extremo de la envoltura con la cual está en contacto, fijando juntas de ese modo las piezas de trabajo. El incremento de la tensión eventualmente causa que el mandril se rompa en una parte debilitada (un cuello de rotura) en una posición previamente determinada adecuada a lo largo de su longitud. La herramienta es accionada por un sistema hidroneumático. Las herramientas de este tipo y su manera de funcionamiento y utilización son muy conocidas por aquellos expertos en la técnica. Un ejemplo de una herramienta de este tipo es la ampliamente disponible comercialmente bajo la marca comercial registrada GENESIS.
El documento WO 2005/025772 (Avdel) sobre el cual se basa el preámbulo de las reivindicaciones 1 y 3 revela una herramienta que comprende un alojamiento, un casquillo y medios de recolecta de los vástagos y medios de supervisión que comprenden un sensor de la fuerza y un indicador de la posición separado. El sensor de la fuerza está dispuesto en un primer adaptador colocado entre el casquillo y el alojamiento y el indicador de la posición está dispuesto en un segundo adaptador colocado entre el alojamiento y después los medios de recolecta de los vástagos.
En la práctica es deseable asegurar que una herramienta de este tipo se comporte correctamente y de forma óptima. La presente invención está pensada para proveer un sistema el cual posibilita que esto sea realizado, haciendo posible la supervisión de la variación de la fuerza aplicada por la herramienta al elemento de fijación progresivamente a medida que progresa la carrera de la herramienta (esto es, el desplazamiento de los medios de agarre del mandril con relación a la tobera) durante la colocación de un elemento de fijación.
La invención provee, en uno de sus aspectos, un dispositivo de supervisión como se establece en la reivindicación adjunta 1. Características preferidas adicionales se establecen en las reivindicaciones 2, 6 y 8.
La invención provee, en otros de sus aspectos, una herramienta de colocación de un elemento de fijación como se establece en la reivindicación 3. Aspectos preferidos adicionales se establecen en las reivindicaciones 4, 5, 6 y 9.
Una forma de realización específica de la invención se describirá ahora a título de ejemplo y con referencia a los dibujos adjuntos, en los cuales:
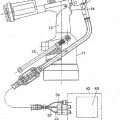
La figura 1 es un alzado lateral exterior de una herramienta de colocación de un elemento de fijación que incorpora un dispositivo de supervisión;
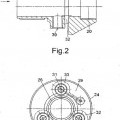
La figura 2 es una sección axial a través del cuerpo del conjunto de dispositivo de supervisión antes de estar instalado en la herramienta;
La figura 3 es un alzado desde el extremo tomado en la dirección de la flecha III de la figura 2, algunas partes estando representadas en sombra;
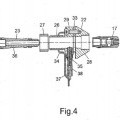
La figura 4 es una sección axial a través del conjunto del dispositivo de supervisión y las piezas adyacentes de la herramienta, que ilustra en forma de despiece cómo se montan juntas;
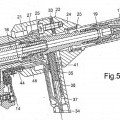
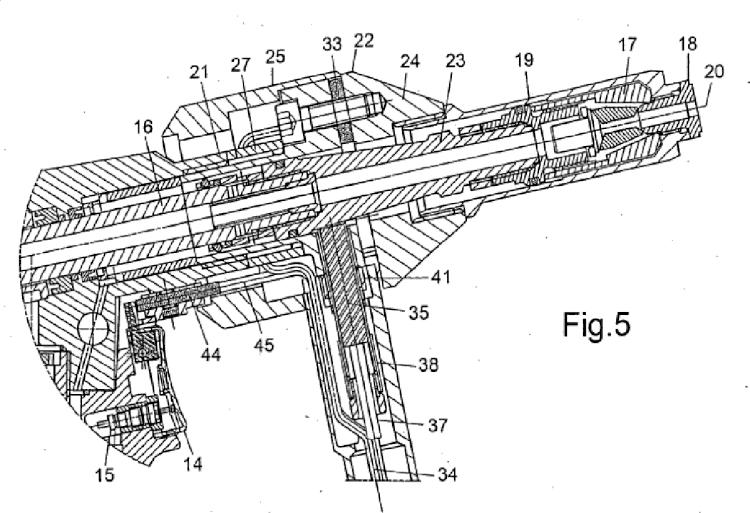
La figura 5 es una sección axial similar a través de la colocación montada; y
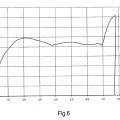
La figura 6 es un ejemplo ilustrativo de un trazado gráfico de la fuerza con respecto a la carrera.
La herramienta de colocación de los elementos de fijación de este ejemplo está comercialmente disponible bajo la designación Genesis modelo G4HD. Su forma, construcción y procedimiento de funcionamiento y utilización general (aparte del dispositivo de supervisión) son muy conocidos. Brevemente, con referencia a la figura 1, la herramienta 11 se sujeta con la mano por medio de una empuñadura de pistola 12 la cual rodea el cilindro hidráulico de un intensificador neumático / hidráulico, el cual es alimentado con aire bajo presión a través de una manguera 13. Por encima de la empuñadura de pistola está un disparador 14, el apriete del cual acciona el funcionamiento de la herramienta abriendo una válvula de aire 15 (figuras 4 y 5) para suministrar aire comprimido al intensificador neumático / hidráulico. Esto causa la aplicación de fluido hidráulico bajo presión a un cilindro hidráulico que contiene un pistón hidráulico 16, el extremo delantero del cual está conectado a los medios de agarre del mandril provistos mediante un conjunto de mordazas 17. El pistón 16 y el conjunto de mordazas 17 se desplazan a lo largo de un eje
20.
La herramienta incluye medios que entran en contacto con la envoltura para entrar en contacto con la envoltura de un elemento de fijación que se va a colocar, en forma de un yunque 18 en el extremo delantero de una tobera tubular 19, en el interior de la cual el conjunto de mordazas 17 se desplaza de forma coaxial. En la herramienta normal sin el dispositivo de supervisión, la parte trasera de la tobera está fijada de forma roscada directamente al extremo delantero 21 del cuerpo de la herramienta y el conjunto de mordazas está fijado de forma roscada directamente al extremo delantero del pistón hidráulico 16.
En este ejemplo, el dispositivo de supervisión comprende un conjunto de supervisión 22 el cual está ajustado entre el cuerpo de la herramienta 21 y la tobera 19 y un adaptador del pistón sustancialmente tubular 23 el cual está ajustado entre el pistón hidráulico 16 y el conjunto de mordazas 17. Para ajustar el dispositivo a la herramienta, en primer lugar se quitan (mediante desenroscado) la tobera 19 y el conjunto de mordazas 17 del cuerpo de la herramienta 21 y el pistón hidráulico 16, respectivamente. Con referencia a la figura 4, el adaptador del pistón 23 se fija en su extremo trasero a la parte delantera del pistón 16 y el conjunto de mordazas se fija al extremo delantero del adaptador del pistón 23. El conjunto de supervisión 22 incluye un cuerpo 24 y una cubierta trasera 25 (no ilustrada en la figura 4, por claridad de la ilustración). El cuerpo 24 está fijado al extremo delantero 21 del cuerpo de la herramienta mediante roscado de su parte roscada que se prolonga hacia atrás 26 en el interior del extremo delantero 21 del cuerpo de la herramienta, en donde se fija por medio de una tuerca de bloqueo 27, después de que el conjunto de supervisión 22 haya sido apropiadamente alineado de forma circunferencial alrededor de su eje 20. La posición axial relativa del conjunto de mordazas 17 con respecto a la tobera 18 es la misma de la que era en la herramienta original.
Con referencia... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo de supervisión (22) para utilizarlo con una herramienta para la colocación de elementos de fijación (11) para la colocación de elementos de fijación del tipo que comprende una envoltura y un mandril al cual se le aplica progresivamente una fuerza relativa creciente para desplazar progresivamente las posiciones relativas del mandril y la envoltura para deformar de ese modo la envoltura, herramienta la cual comprende un mecanismo de disparo de la herramienta (14), medios que están en contacto con la envoltura (18) para estar en contacto con la envoltura, medios de agarre del mandril (17) para agarrar el mandril y medios de aplicación de fuerza para aplicar una fuerza creciente de forma progresiva a los medios de agarre del mandril con respecto a los medios que están en contacto con la envoltura, para desplazar progresivamente de ese modo el mandril con respecto a la envoltura, los medios de aplicación de la fuerza comprendiendo un pistón hidráulico (16), dispositivo de supervisión el cual comprende:
- un adaptador del pistón (23) adaptado para ser colocado entre los medios agarre del mandril (17) y el pistón hidráulico (16), para desplazarse con los medios de agarre del mandril (17) y el pistón hidráulico (16); y
- un cuerpo del conjunto (24) que se puede unir a la herramienta (11) entre los medios de aplicación de la fuerza y los medios que están en contacto con la envoltura (18), dicho cuerpo del conjunto (24) transportando un sensor de la fuerza (33) para detectar la fuerza aplicada por los medios de aplicación de la fuerza a los medios de agarre del mandril (17) con respecto a los medios que están en contacto con la envoltura (18);
caracterizado porque dicho cuerpo del conjunto (24) también transporta un sensor de la carrera sin contacto (35) para detectar la posición de los medios de agarre del mandril (17) con relación a los medios que están en contacto con la envoltura (18), el sensor de la carrera (35) funcionando sin contacto físico con los medios de agarre del mandril (17) o cualquier pieza de la herramienta o conjunto que se desplace con ella.
2. Un dispositivo de supervisión como se reivindica la reivindicación 1 en el que el adaptador del pistón (23) incluye una cara que forma conicidad o inclinada (36) adaptada para desplazarse pasando por el sensor de la carrera (35) de modo que la distancia entre el sensor de la carrera (35) y la pieza adyacente de la cara que forma conicidad o inclinada varía a medida que se desplazan los medios de agarre del mandril (17) y es detectada por el sensor de la carrera (35).
3. Una herramienta para la colocación de elementos de fijación (11) para colocar elementos de fijación del tipo que comprende una envoltura y un mandril al cual se le aplica progresivamente una fuerza relativa creciente para desplazar progresivamente las posiciones relativas del mandril y la envoltura para deformar de ese modo la envoltura, herramienta la cual comprende un mecanismo de disparo de la herramienta (14), medios que están en contacto con la envoltura (18) para estar en contacto con la envoltura, medios de agarre del mandril (17) para agarrar el mandril y medios de aplicación de fuerza para aplicar una fuerza creciente de forma progresiva a los medios de agarre del mandril con respecto a los medios que están en contacto con la envoltura, para desplazar progresivamente de ese modo el mandril con respecto a la envoltura, los medios de aplicación de la fuerza comprendiendo un pistón hidráulico (16), la herramienta para la colocación de elementos de fijación incorporando un dispositivo de supervisión (22) el cual comprende:
- un adaptador del pistón (23) colocado entre los medios agarre del mandril (17) y el pistón hidráulico (16), para desplazarse con los medios de agarre del mandril (17) y el pistón hidráulico (16); y
- un cuerpo del conjunto (24) que se puede unir, de forma que se puede desmontar, a la herramienta
(11) entre los medios de aplicación de la fuerza y los medios que están en contacto con la envoltura (18), dicho cuerpo del conjunto (24) transportando un sensor de la fuerza (33) para detectar la fuerza aplicada por los medios de aplicación de la fuerza a los medios de agarre del mandril (17) con respecto a los medios que están en contacto con la envoltura (18);
caracterizada porque dicho cuerpo del conjunto (24) también transporta un sensor de la carrera sin contacto (35) para detectar la posición de los medios de agarre del mandril (17) con relación a los medios que están en contacto con la envoltura (18), el sensor de la carrera (35) funcionando sin contacto físico con los medios de agarre del mandril (17) o cualquier pieza de la herramienta o conjunto que se desplace con ella.
4. Una herramienta como se reivindica en la reivindicación 3 en la que el adaptador del pistón (23) incluye una cara que forma conicidad o inclinada (36) la cual se desplaza pasando por el sensor de la carrera (35) de modo que la distancia entre el sensor de la carrera (35) y la pieza adyacente de la cara que forma conicidad o inclinada varía a medida que se desplazan los medios de agarre del mandril (17) y es detectada por el sensor de la carrera (35).
5. Una herramienta como se reivindica en la reivindicación 4 en la que la cara que forma conicidad o inclinada del adaptador del pistón (23) es de forma cónica.
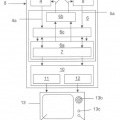
5 6. Un dispositivo de supervisión como se reivindica en la reivindicación 1 o en la reivindicación 2, o una herramienta para la colocación de elementos de fijación como se reivindica en cualquiera de las reivindicaciones 3 a 5, combinado con un dispositivo de comparación de la fuerza / la carrera (42) el cual es alimentado con información por el sensor de la fuerza (33) y el sensor de la carrera (35) y produce un trazado gráfico de la variación de la carrera con la variación de la fuerza.
7. Una herramienta como se reivindica en la reivindicación 6 en la cual el mecanismo de disparo de la herramienta
(14) está provisto de un sensor de funcionamiento del disparador (44), el cual también alimenta información al dispositivo de comparación de la fuerza / la carrera (42) para accionar de ese modo el dispositivo de comparación (42) cuando el disparador (14) funciona para accionar los medios de aplicación de la fuerza.
Patentes similares o relacionadas:
 UN METODO DE VERIFICACION DINAMICA DE UN PROCESO DE REMACHADO CON REMACHES CIEGOS REALIZADO CON UN APARATO DE REMACHADO AUTOMATICO, Y DISPOSITIVO VERIFICADOR PARA REALIZAR LA VERIFICACION, del 13 de Junio de 2011, de AIRBUS OPERATIONS, S.L: Un método de verificación dinámica de un proceso de remachado con remaches ciegos realizado con un aparato de remachado automático, y dispositivo verificador para […]
UN METODO DE VERIFICACION DINAMICA DE UN PROCESO DE REMACHADO CON REMACHES CIEGOS REALIZADO CON UN APARATO DE REMACHADO AUTOMATICO, Y DISPOSITIVO VERIFICADOR PARA REALIZAR LA VERIFICACION, del 13 de Junio de 2011, de AIRBUS OPERATIONS, S.L: Un método de verificación dinámica de un proceso de remachado con remaches ciegos realizado con un aparato de remachado automático, y dispositivo verificador para […]
Método para la configuración del mandril de una remachadora para elementos de remache ciegos y remachadora, del 27 de Mayo de 2020, de HONSEL Distribution GmbH & Co: Método para la configuración de una remachadora manual , accionada por un accionamiento eléctrico , para la colocación de elementos de remache ciegos , presentando la […]
Procedimiento para la unión de al menos dos componentes, del 29 de Abril de 2020, de DAIMLER AG: Procedimiento para la unión de un primer componente al menos a un segundo componente mediante al menos un elemento de ensamblaje que se inserta […]
Remachadora manual y método para su configuración, del 6 de Noviembre de 2019, de VVG-Befestigungstechnik GmbH & Co. KG: Método para la configuración de una remachadora manual provista de un accionamiento eléctrico para colocar elementos de remache ciego en un taladro de alojamiento […]
Procedimiento y dispositivo para colocar un tornillo, del 9 de Octubre de 2019, de Weber Schraubautomaten GmbH: Procedimiento para colocar un tornillo especialmente un tornillo formador de agujero por fluencia, en el que se acciona el tornillo […]
Procedimiento y aparato para la inspección de unión de materiales, del 2 de Octubre de 2019, de Comau LLC: Un procedimiento para realizar secuencialmente una pluralidad de operaciones de unión, comprendiendo el procedimiento: posicionar un dispositivo […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]
Método de control de calidad incorporado al proceso durante un ensamblaje de taladrado-llenado, del 1 de Julio de 2019, de THE BOEING COMPANY: Un método para ensamblar una estructura , comprendiendo dicho método: localizar una posición en un apilamiento vertical de ensamblaje donde debe instalarse un […]