SISTEMA DE LIMPIEZA CORTE Y MANIPULACION DE PESCADOS Y MARISCOS.
Sistema de limpieza corte y manipulación de pescados y mariscos.
Sistema para la limpieza, corte y manipulación de pescados (1) que comprende: una primera estación (100) de colocación del pescado (1) configurada para situar a dicho pescado (1) verticalmente sobre la segunda estación de pelado (200); una segunda estación de pelado (200) configurada para quitar la piel del pescado (1) por medios con agua/muela sin dañar la carne; una tercera estación de corte (300) del pescado pelado (2) en la segunda estación (200) configurada para detectar y extraer la espina del pescado pelado (2), separando las dos partes (3) de la espina dorsal de dicho pescado pelado (2) la cual lleva un recorrido diferente (3); y una cuarta estación de eviscerado (400) de las partes laterales (3) configurada para separar la cabeza y vísceras mediante agua a presión, mientras que las pinzas clasificadoras de pescado limpio y sucio, retiran las vísceras y las derivan para desperdicios a una trituradora
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930179.
A22C25/08NECESIDADES CORRIENTES DE LA VIDA. › A22CARNICERIA; TRATAMIENTO DE LA CARNE; TRATAMIENTO DE LAS AVES DE CORRAL O DEL PESCADO. › A22C TRATAMIENTO DE LA CARNE, DE LAS AVES DE CORRAL O DEL PESCADO (conservas A23B; producción de composiciones a base de proteínas para la alimentación A23J 1/00; productos alimenticios a base de pescado, carne o aves de corral A23L; trituración, p. ej. picado de la carne B02C 18/00; preparación de proteínas en sí C07K 1/00). › A22C 25/00 Tratamiento del pescado. › Sujeción, guía o transporte del pescado antes, durante o después de su tratamiento (A22C 25/06 tiene prioridad).
A22C25/14A22C 25/00 […] › Descabezado, desviscerado o limpieza del pescado.
A22C25/16A22C 25/00 […] › Extracción de las espinas y raspas; Cortado del pescado en filetes.
Fragmento de la descripción:
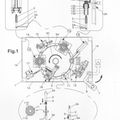
Sistema para la limpieza, corte y manipulación de pescados y mariscos. El objeto de la presente invención es un sistema para la limpieza, corte y manipulación de pescados y mariscos que permita automatizar el sistema productivo que actualmente es manual y que consta de varias etapas o secciones que conforman la cadena de producción para ser envasado en latas de conserva o envasado en fresco y/o congelado, para su distribución y venta. Este sistema está comprendido en el sector de la industria alimentaria. Antecedentes de la invención Actualmente existen distintos tipos de máquinas que se emplean en la industria alimentaria para la manipulación de alimentos, si bien, cada una de ellas tiene sus propias características. Así, por ejemplo, existen máquinas peladoras, de corte, de cocción, pero ninguna muestra un sistema de producción en cadena. Entre los documentos que describen sistemas y métodos para la limpieza, corte y manipulación de pescado, se encuentra la patente europea EP0704159, la cual describe un método para el procesado de atún congelado, basado en la inyección de sales y el agitado posterior del atún. Por otro lado, la PCT WO98/12929 describe un método y aparato para el limpiado del pescado basado en una cinta de transporte continua, pero en donde la manipulación del pescado es absolutamente manual. En general, en la industria de conservas de pescado y marisco, el proceso de selección y limpieza se realiza de manera manual, siendo las operarías las que seleccionan, lavan, cortan, despiezan y envasan el pescado, siguiendo de manera general el siguiente esquema: ALMACENAMIENTO > DESCABEZADO/CORTE > EMPARRILLADO > DESCONGELACIÓN > COC- CIÓN > ENFRIADO > PELADO El pelado se realiza después de la cocción e impide en gran medida el aprovechamiento de la piel. Descripción de la invención La presente invención tiene por objeto principal un sistema para la limpieza, corte y manipulación de pescados, mariscos, con una pluralidad de estaciones robotizas que comprende: Almacenamiento de una sola congelación en origen, introducción de forma automatizada la entrada del producto sobre una báscula en continuo, para el registro de peso, introducción en el sistema, la especie, zona de captura, proveedor, lote para trazabilidad, etc. Una primera estación robotizada de colocación del pescado configurada para situar a dicho pescado verticalmente sobre la segunda estación de pelado, por agua o por muela, para cada aplicación según el pescado o marisco, esto se realiza por medio de un sistema de colocación y apriete del producto por un brazo robotizado y un cilindro neumático. Una segunda estación robotizada de pelado configurada para quitar la piel del pescado por medio de un chorro de agua a presión o con una muela especial según la aplicación para que no se dañe la carne, se guía por medio de una trayectoria definida por un sistema de visión artificial previo que consta de medidores por láser y otros, el agua con piel se desliza por una resbaladera a un recipiente y es transportada por una bomba de vacío a un sistema de separación de pieles, donde se depura el agua para su reutilización en la limpieza automática que llevan todos los transportadores para evitar la contaminación y facilitar la limpieza cuando se ha realiza el trabajo programado. Una tercera estación de corte del pescado, marisco ya pelado en la segunda estación configurada para detectar y extraer la espina dorsal de dicho pescado, marisco pelado, separando dos partes cortadas del pescado o marisco pelado, esto se realiza por dos chorros de agua a presión paralelos, la espina dorsal de dicho pescado pelado lleva un recorrido diferente al resto con un sistema de pesaje y otro sistema de recuperación de carne, al igual que la anterior estación, el corte es trazado según una trayectoria definida por un sistema de visión artificial previo que consta de medidores por láser y otros. La separación de los dos inyectores de agua a presión se realiza por medio de un sistema que también mueven las pinzas que siguen a los dos chorros paralelos por un servomotor que depende de lo que detecte la visión artificial, estas pinzas son las que retiran la espina una vez cortada, estas tienen un filo por la parte inferior y frontal que rematan el corte después de pasar los chorros de agua a presión. Una cuarta estación de despiece configurada para separar la ventresca, lomos, cabeza, cola y vísceras mediante el chorro de agua a presión, al igual que la anterior estación, el corte es trazado según una trayectoria definida por un sistema de visión artificial previo que consta de medidores por láser y otros, después pasa por un sistema de vibración 2 ES 2 350 079 A1 para facilitar la clasificación, luego por un sistema de rayos X que determina si el producto limpio lleva o no espinas u otro material no autorizado, posteriormente pasa por un sistema de clasificación que moverá a: - cinta de sucio la cabeza y vísceras. - cita de limpio los lomos y ventresca sin espinas ni inclusiones no autorizadas. - cinta con los lomos y ventrescas con espinas e inclusiones no autorizadas. El producto va por un transportador a una báscula en continuo y a una trituradora; asegurando en todo momento la trazabilidad. El producto limpio con espinas o inclusiones no autorizadas se reprocesará en un sistema en paralelo que después de eliminadas estas se introducirá nuevamente en el transportador de producto limpio este se pesará en una báscula en continuo para el control de la producción y trazabilidad del mismo. El producto limpio una vez inspeccionado visual y automáticamente, es enviado por un transportador hacia un sistema de vacío para absorber el aire del producto, después ira hacia la cocción por microondas en continuo, por medio de otro transportador, según los alimentos funcionales que se determinen en cada caso. Gracias al sistema y método así descrito, es posible la automatización de un sistema productivo que, actualmente, es absolutamente manual, con el consiguiente ahorro de costes, tiempo, espacio y modernización de la producción. Una ventaja adicional de la presente invención es el considerable ahorro de agua ya que, en los procesos manuales se utiliza constantemente agua limpia durante la limpieza, el sistema automático sólo utiliza el agua imprescindible y, además, está dotado de un sistema de recirculación del agua sucia hacia un dispositivo de depuración para su posible retorno al proceso. Finalmente, cabe indicar que mediante este sistema se asegura la sostenibilidad medioambiental ya que todos los residuos son separados y derivados para su aprovechamiento y valorización, como en el caso de la piel, se consigue aumentar la vida útil del producto con una mínima manipulación y sin añadir ningún producto químico durante el proceso, este sistema y método aquí descrito cumple con los requisitos legales y medioambientales establecidos en la legislación vigente. Breve descripción de las figuras Fig. 1 muestra una vista en perspectiva del sistema objeto de la invención. Fig. 2 muestra una vista en detalle y perspectiva de la primera estación de colocación propia del sistema objeto de la invención. Fig. 3 muestra una vista en detalle y perspectiva de la segunda estación de pelado propia del sistema objeto de la invención. En la Fig. 3A se muestra en detalle el útil de limpieza del robot. Fig. 4 muestra una vista en detalle y perspectiva de la tercera estación de extracción de espina propia del sistema objeto de la invención. En la Fig. 4A se muestra en detalle el útil de extracción de espina del robot. Fig. 5 muestra una vista en detalle y perspectiva de la cuarta estación de eviscerado propia del sistema objeto de la invención. En la Fig. 5A se muestra en detalle el útil de eviscerado del robot. Realización preferente de la invención Tal y como se puede observar en la figura 1, en una primera realización preferida, el sistema comprende una primera estación robotizada 100 de colocación del pescado 1 sobre la segunda estación de pelado 200. Dicha primera estación 100 (figura 2), a su vez, comprende una báscula de pesado en continuo 101, al inicio de la estación, en donde se colocará el pescado 1, por ejemplo, de forma manual o bien procedente de una cinta de transporte anterior y no mostrada en la figura. Posteriormente, el pescado 1 pasará de la báscula 101 a una cinta transportadora 102 convencional, la cual portará al pescado 1 hasta el radio de acción del robot colocador 103, sito al final de la cinta 102 y sustentado por un soporte 104 sobreelevado sobre el final de la cinta 102. Una vez detectada la presencia del pescado en ese punto, por unos medios de detección de presencia convencionales, el robot 103 recogerá el pescado 1 y lo situará en la entrada de la segunda estación de pelado 200. En esta segunda estación de pelado 200 (figura 3) se sitúa el...
Reivindicaciones:
1. Sistema para la limpieza, corte y manipulación de pescados (1), de los del tipo que comprenden una pluralidad de estaciones robotizas caracterizado porque comprende, al menos: una primera estación (100) de colocación del pescado (1) configurada para situar a dicho pescado (1) verticalmente sobre la segunda estación de pelado (200); una segunda estación de pelado (200) configurada para quitar la piel del pescado (1) por medios de lijado de tal forma que no se dañe la carne; una tercera estación de corte (300) del pescado pelado (2) en la segunda estación (200) configurada para detectar y extraer la espina dorsal de dicho pescado pelado (2), separando los dos lomos cortados (3) de la espina dorsal de dicho pescado pelado (2) la cual lleva un recorrido diferente al de los lomos (3); y una cuarta estación de eviscerado (400) de los lomos (3) configurada para separar la cabeza y vísceras mediante el chorro de agua a presión, mientras que gracias a las pinzas clasificadoras de pescado limpio y sucio, se retiran las vísceras y las derivan para desperdicios a una trituradora; en donde el procesado del pescado (1) se realiza en continuo, pasando de una estación a otra sin solución de continuidad y asegurando en todo momento la trazabilidad del pescado gracias a unos medios de visión artificial (203, 303, 401) configurados a tal efecto, enviando los datos relativos a la trazabilidad a una CPU externa. 2. Sistema de acuerdo con la reivindicación 1 en donde la primera estación (100) comprende una báscula de pesado en continuo (101), al inicio de la estación, en donde se colocará el pescado (1); y en donde, posteriormente, el pescado (1) pasa de la báscula (101) a una cinta transportadora (102) convencional, la cual portará al pescado (1) hasta el radio de acción del robot colocador (103), sito al final de la cinta (102) y sustentado por un soporte (104) sobreelevado sobre el final de la cinta (102); todo ello configurado para que una vez sea detectada la presencia del pescado en ese punto por unos medios de detección de presencia convencionales dicho robot (103) recoja el pescado (1) y lo sitúe en la entrada de la segunda estación de pelado (200). 3. Sistema de acuerdo con las reivindicaciones 1 y 2 en donde la segunda estación de pelado (200) comprende un elemento posicionador (201) del pescado (1) procedente de la primera estación (100) configurado para clavar el pescado (1) sobre una cinta de transporte de clavos (202); y en donde, éste, pasa bajo un pórtico en donde se hallan situados unos medios de visión artificial (203) configurados para facilitar la trazabilidad del pescado. 4. Sistema de acuerdo con la reivindicación 3 en donde el elemento posicionador (201), a su vez comprende, esencialmente, un cuerpo en V en donde sobre el valle de dicha V el robot (103) de colocación deposita el pescado (1) para que un pistón (207) lo empuje y clave sobre una cinta de clavos (202). 5. Sistema de acuerdo con las reivindicaciones anteriores, en donde la estación de pelado (200) comprende una zona de pelado, determinada por el radio de acción de un robot de pelado (204), el cual comprende en su extremo un útil de pelado compuesto esencialmente por una muela (205) configurada para quitar la piel del pescado (1) por lijado de la misma, sin dañar la carne, y unos medios de impulsión continua de agua (206) configurados para: (a) la limpieza del lijado de la muela (205) y, (b) el corte de las aletas del propio pescado (1). 6. Sistema de acuerdo con las reivindicaciones anteriores, en donde la tercera estación de corte y separación de la espina central (300) comprende: una entrada del pescado pelado (2) sobre la cinta de clavos (202) hacia la zona o radio de acción de un robot de corte (302); en donde en esta zona de entrada y en un pórtico se sitúan unos segundos medios de visión artificial (303) configurados, además, para detectar la aleta dorsal del pescado pelado (2), que marca igualmente en qué posición se encuentra la espina del pescado pelado (2); y en donde una vez el pescado pelado (2) quede situado en la zona de corte propiamente dicha, el robot de corte (302), acciona sobre él un útil de corte y separación; finalizado el corte, los lomos (3) del pescado se depositan respectivamente en cintas de transporte estándar (301), a derecha e izquierda de la zona de corte. 7. Sistema de acuerdo con la reivindicación 6 en donde el útil de corte y separación del robot de corte (302) comprende: un sistema de servomotor (304) para el movimiento de los cortadores (305) y las pinzas (306); unos medios de corte (305) de la espina por agua a presión; y unos medios separadores (306) o pinzas, configurados para la separación ES 2 350 079 A1 de los lomos izquierdo y derecho del pescado respecto de la espina, evitando que mientras corta el agua no se vuelvan a pegar dichos lomos, y en donde además, estas pinzas (306) llevarían sus bordes inferior y frontal, rematando el corte efectuado; una vez pasadas las pinzas (306) longitudinalmente por la espina del pescado, extraerían dicha espina, la cual es depositada por el robot (302) sobre una canaleta inclinada (307) y de ahí a una cinta transportadora estándar (308) que porta a las espinas hasta una báscula (309). 8. Sistema de acuerdo con las reivindicaciones anteriores en donde la cuarta estación de eviscerado (400) comprende: (a) unos terceros medios de visión artificial (401) situados sobre un pórtico sobreelevado respecto de las cintas de transporte (402, 403) configurados para, además de la trazabilidad, observar los lomos (3), y reconocer sus características para el posterior eviscerado; (b) una zona de eviscerado, en donde un robot de eviscerado (404) dotado de un útil de eviscerado está configurado para separar la cabeza y las vísceras de los lomos (3) y retirarlas a una cinta de salida de vísceras (403) dejando el lomo limpio (4) en una cinta de transporte de producto limpio (402); y (c) unos medios de inspección por rayos X sobre la cinta de producto limpio (402), configurados para detectar las espinas en dicho lomo limpio (4), de tal forma que si algún producto aún contiene espinas y/o vísceras un dispositivo de separación (405) recoge el lomo todavía sucio y lo deposita en la cinta de salida de vísceras (403). 9. Sistema de acuerdo con las reivindicación 8 en donde el útil de eviscerado comprende, a su vez, un sistema de servomotor (406) para el movimiento de los cortadores (407) y las pinzas (408); unos medios de corte (407) de lomos (3) y eviscerador por agua a presión; y unos medios clasificadores (408) o pinzas configuradas para la clasificación del pescado limpio y sucio, así como para voltear el producto y transportar los productos entre cinta y cinta (402, 403). 10. Método para la limpieza, corte y manipulación de pescados (1), implementado en el sistema de las reivindicaciones 1 a 9 caracterizado porque comprende, al menos, las siguientes etapas: una primera etapa de colocación del pescado (1) en donde se sitúa a dicho pescado (1) verticalmente sobre un elemento colocador y de transporte; una segunda etapa de pelado en donde se quita la piel del pescado por medios de lijado de tal forma que no se dañe la carne; una tercera etapa de corte en donde se detecta y extrae la espina dorsal del pescado pelado (2) previamente, separando los dos lomos cortados (3) de la espina dorsal de dicho pescado pelado (2) la cual lleva un recorrido diferente al de los lomos (3); y una cuarta etapa de eviscerado de los lomos (3) en donde se separa la cabeza y las vísceras mediante un chorro de agua a presión, y se clasifica el pescado limpio y sucio, se retiran las vísceras y se derivan para desperdicios a una trituradora; estando dicho método implementado en continuo, pasando de una estación a otra sin solución de continuidad y asegurando en todo momento la trazabilidad del pescado. 6 ES 2 350 079 A1 7 ES 2 350 079 A1 8 ES 2 350 079 A1 9 ES 2 350 079 A1 ES 2 350 079 A1 11 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
Patentes similares o relacionadas:
PROCEDIMIENTO DE LIMPIEZA DEE CEFALOPODOS Y MAQUINA PARA REALIZARLO, del 16 de Junio de 2008, de CHIPINORTE, S.L.: Procedimiento de limpieza de cefalópodos y máquina para realizarlo, comprendiendo una sucesión de operaciones realizadas en una máquina de armazón compacto con […]
Planta de procesamiento de pescado, del 22 de Febrero de 2017, de CABINPLANT A-S: Un sistema para procesar pescado de una sola especie y de constitución anatómica diferente que tiene al menos una parte de extremo de desecho, […]
INSTALACIÓN Y PROCEDIMIENTO AUTOMATIZADOS PARA PROCESAR TÚNIDOS Y PESCADOS SIMILARES, del 20 de Agosto de 2015, de MECANICA ALIMENTARIA, S.A.: Permite automatizar procesado de túnidos y similares. Comprende: sección de entrada , sección de cocción , sección de descabezado , sección de separación , […]
INSTALACIÓN Y PROCEDIMIENTO AUTOMATIZADOS PARA PROCESAR TÚNIDOS Y SIMILARES, del 13 de Agosto de 2015, de MECANICA ALIMENTARIA, S.A.: Instalación y procedimiento automatizados para procesar túnidos y similares. La instalación comprende: sección de entrada , sección de cocción , sección de descabezado […]
Proceso para tratar el residuo de pescado, del 22 de Diciembre de 2014, de BILEGA ENERGÍA, S.L: Proceso para tratar el residuo de pescado.
La presente invención se refiere a un proceso para tratar el residuo de pescado, eliminando […]
PROCEDIMIENTO Y APARATO PARA LA LIMPIEZA EN CONTINUO DE LOMOS DE ATÚN COCIDO, del 16 de Septiembre de 2014, de ASOCIACIÓN NACIONAL DE FABRICANTES DE CONSERVAS DE PESCADOS Y MARISCOS - CENTRO TÉCNICO NACIONAL DE CONSERVACIÓN DE PRODUCTOS DE LA PESCA: Procedimiento de limpieza de lomos de atún cocido, a partir de lomos cortados longitudinalmente con perfil piramidal, que se posicionan e inmovilizan […]
MÁQUINA DE EVISCERACIÓN Y LIMPIEZA INTERIOR DE CEFALÓPODOS, del 4 de Septiembre de 2014, de NODOSAFER, S.L: Máquina de evisceración y limpieza interior de cefalópodos.
Esta máquina comprende: - un dispositivo de sujeción del cefalópodo (C) a procesar, que comprende una horma […]
Máquina peladora de cefalópodos u otros seres marinos, del 18 de Febrero de 2014, de PALINOX INGENIERIA Y PROYECTOS, S.L.: 1. Máquina peladora de cefalópodos u otros seres marinos, del tipo que comprende al menos unos medios de pelado, unos medios motrices de dichos medios de pelado, […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 PROCEDIMIENTO DE LIMPIEZA DEE CEFALOPODOS Y MAQUINA PARA REALIZARLO, del 16 de Junio de 2008, de CHIPINORTE, S.L.: Procedimiento de limpieza de cefalópodos y máquina para realizarlo, comprendiendo una sucesión de operaciones realizadas en una máquina de armazón compacto con […]
PROCEDIMIENTO DE LIMPIEZA DEE CEFALOPODOS Y MAQUINA PARA REALIZARLO, del 16 de Junio de 2008, de CHIPINORTE, S.L.: Procedimiento de limpieza de cefalópodos y máquina para realizarlo, comprendiendo una sucesión de operaciones realizadas en una máquina de armazón compacto con […]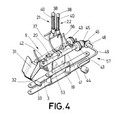 INSTALACIÓN Y PROCEDIMIENTO AUTOMATIZADOS PARA PROCESAR TÚNIDOS Y PESCADOS SIMILARES, del 20 de Agosto de 2015, de MECANICA ALIMENTARIA, S.A.: Permite automatizar procesado de túnidos y similares. Comprende: sección de entrada , sección de cocción , sección de descabezado , sección de separación , […]
INSTALACIÓN Y PROCEDIMIENTO AUTOMATIZADOS PARA PROCESAR TÚNIDOS Y PESCADOS SIMILARES, del 20 de Agosto de 2015, de MECANICA ALIMENTARIA, S.A.: Permite automatizar procesado de túnidos y similares. Comprende: sección de entrada , sección de cocción , sección de descabezado , sección de separación , […]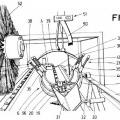 INSTALACIÓN Y PROCEDIMIENTO AUTOMATIZADOS PARA PROCESAR TÚNIDOS Y SIMILARES, del 13 de Agosto de 2015, de MECANICA ALIMENTARIA, S.A.: Instalación y procedimiento automatizados para procesar túnidos y similares. La instalación comprende: sección de entrada , sección de cocción , sección de descabezado […]
INSTALACIÓN Y PROCEDIMIENTO AUTOMATIZADOS PARA PROCESAR TÚNIDOS Y SIMILARES, del 13 de Agosto de 2015, de MECANICA ALIMENTARIA, S.A.: Instalación y procedimiento automatizados para procesar túnidos y similares. La instalación comprende: sección de entrada , sección de cocción , sección de descabezado […]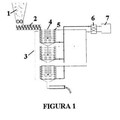 Proceso para tratar el residuo de pescado, del 22 de Diciembre de 2014, de BILEGA ENERGÍA, S.L: Proceso para tratar el residuo de pescado.
La presente invención se refiere a un proceso para tratar el residuo de pescado, eliminando […]
Proceso para tratar el residuo de pescado, del 22 de Diciembre de 2014, de BILEGA ENERGÍA, S.L: Proceso para tratar el residuo de pescado.
La presente invención se refiere a un proceso para tratar el residuo de pescado, eliminando […] PROCEDIMIENTO Y APARATO PARA LA LIMPIEZA EN CONTINUO DE LOMOS DE ATÚN COCIDO, del 16 de Septiembre de 2014, de ASOCIACIÓN NACIONAL DE FABRICANTES DE CONSERVAS DE PESCADOS Y MARISCOS - CENTRO TÉCNICO NACIONAL DE CONSERVACIÓN DE PRODUCTOS DE LA PESCA: Procedimiento de limpieza de lomos de atún cocido, a partir de lomos cortados longitudinalmente con perfil piramidal, que se posicionan e inmovilizan […]
PROCEDIMIENTO Y APARATO PARA LA LIMPIEZA EN CONTINUO DE LOMOS DE ATÚN COCIDO, del 16 de Septiembre de 2014, de ASOCIACIÓN NACIONAL DE FABRICANTES DE CONSERVAS DE PESCADOS Y MARISCOS - CENTRO TÉCNICO NACIONAL DE CONSERVACIÓN DE PRODUCTOS DE LA PESCA: Procedimiento de limpieza de lomos de atún cocido, a partir de lomos cortados longitudinalmente con perfil piramidal, que se posicionan e inmovilizan […] MÁQUINA DE EVISCERACIÓN Y LIMPIEZA INTERIOR DE CEFALÓPODOS, del 4 de Septiembre de 2014, de NODOSAFER, S.L: Máquina de evisceración y limpieza interior de cefalópodos.
Esta máquina comprende: - un dispositivo de sujeción del cefalópodo (C) a procesar, que comprende una horma […]
MÁQUINA DE EVISCERACIÓN Y LIMPIEZA INTERIOR DE CEFALÓPODOS, del 4 de Septiembre de 2014, de NODOSAFER, S.L: Máquina de evisceración y limpieza interior de cefalópodos.
Esta máquina comprende: - un dispositivo de sujeción del cefalópodo (C) a procesar, que comprende una horma […]