APARATO PARA RETIRAR TAPAS DE RECIPIENTES DE MUESTRAS TUBULARES.
Aparato para retirar tapas (1) de recipientes tubulares (2) de muestras,
que comprende un conjunto (4) de cabezal que es móvil por encima de un recipiente (2) de altura variable a lo largo de su eje vertical, teniendo dicho conjunto (4) de cabezal una cavidad receptora (15) de tapas con una superficie de apoyo superior (65) para emparejarse con la superficie superior de la tapa (1) de recipientes (2) de tamaño variable, caracterizado porque dicho conjunto (4) de cabezal está dotado de un rotor (14) que tiene unos agujeros pasantes radiales (16) para guiar radialmente unos medios afilados (17) entre una posición de reposo y una posición de agarre de la tapa (1) del recipiente, induciendo el rotor (14) la rotación de los medios afilados (17) que agarran la tapa (1) con respecto al recipiente fijado en una posición vertical por unos medios de agarre (8) de un bastidor fijo (11)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/069251.
Solicitante: INPECO IP LTD.
Nacionalidad solicitante: Malta.
Dirección: 259 ST. PAUL STREET VALLETTA VLT 1213 MALTA.
Inventor/es: PEDRAZZINI, GIANANDREA.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Diciembre de 2006.
Clasificación Internacional de Patentes:
- G01N35/00R
Clasificación PCT:
- B01L3/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B01 PROCEDIMIENTOS O APARATOS FISICOS O QUIMICOS EN GENERAL. › B01L APARATOS DE LABORATORIO PARA LA QUIMICA O LA FISICA, DE USO GENERAL (aparatos de uso médico o farmacéutico A61; aparatos para aplicaciones industriales o aparatos de laboratorio cuya estructura y funciones son comparables a las de aparatos industriales similares, ver las clases relativas a los aparatos industriales, en particular las subclases B01 y C12; aparatos de separación o de destilación B01D; dispositivos de mezcla o de agitación B01F; atomizadores B05B; tamices, cribas B07B; tapones, capuchones B65D; manipulación de líquidos en general B67; bombas de vacío F04; sifones F04F 10/00; grifos, válvulas F16K; tubos, empalmes para tubos F16L; aparatos especialmente adaptados al estudio y análisis de materiales G01, particularmente G01N; aparatos eléctricos u ópticos, ver las subclases apropiadas en las secciones G y H). › B01L 3/00 Recipientes o utensilios para laboratorios, p. ej. cristalería de laboratorio (botellas B65D; equipos para enzimología o microbiología C12M 1/00 ); Cuentagotas (recipientes para volumetría G01F). › Tubos de ensayo.
- G01N35/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Análisis automático no limitado a procedimientos o a materiales tratados en uno sólo de los grupos G01N 1/00 - G01N 33/00; Manipulación de materiales a este efecto.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2373570_T3.pdf
Fragmento de la descripción:
Aparato para retirar tapas de recipientes de muestras tubulares La presente invención se refiere a un sistema de destapado, es decir, un aparato para retirar tapas de recipientes de muestras tubulares. Según se emplea en el presente documento, el término "recipiente" significa un artículo que contiene una muestra biológica y que tiene una abertura tubular cerrada por una tapa para el acceso al contenido, por ejemplo, un tubo de ensayo. En laboratorios químicos clínicos automatizados, con el fin de acceder a la muestra biológica contenida en el recipiente, resulta necesario retirar la tapa del recipiente.
Se conocen máquinas destapadoras sólo para tapas a presión y máquinas destapadoras sólo para tapas de rosca.
En las máquinas destapadoras es importante no sólo retirar la tapa a presión o de rosca sin dañarla, sino también operar con recipientes de tamaños diferentes. Además, existe el problema de que el recipiente se ha de retirar de su portador para la operación de retirada de tapa y posteriormente se le ha de volver a colocar en el portador. Esto puede provocar el riesgo potencial de que el recipiente sea recolocado en un portador diferente poniendo en peligro así el proceso de identificación de la muestra en aquellos casos en los que la identificación de muestra se realiza mediante la identificación del portarecipiente.
Los documentos WO-03/034038 y EP-0972744 muestran puestos de destapado con los problemas antes mencionados. Un objeto de la presente invención es proporcionar ahora un aparato de destapado que permita la retirada segura de tapas de rosca y de tapas a presión.
Otro objeto es proporcionar un aparato de destapado que pueda autoadaptarse a recipientes de tamaños diferentes.
Un objeto adicional consiste en proporcionar un aparato de destapado que sea capaz de retirar la tapa sin retirar el recipiente de su portador. A la vista de los objetos anteriores, se describe en la reivindicación 1 el aparato según la presente invención para retirar tapas de recipientes de muestras tubulares.
Las características y ventajas de la presente invención serán evidentes a partir de la siguiente descripción detallada de una realización de la misma ilustrada como ejemplo no limitativo en los dibujos anexos, en los que: La figura 1 es una vista en perspectiva de un aparato según la presente invención en una posición de reposo; La figura 2 es una vista superior del aparato de la figura 1; La figura 3 es una vista en sección según la línea III-III de la figura 2; La figura 4 es la misma vista en sección de la figura 3 en una primera posición de trabajo; La figura 5 es una vista superior del aparato en una segunda posición de trabajo; La figura 6 es una vista en sección según la línea VI-VI de la figura 5; La figura 7 es la misma vista en sección de la figura 6 en una tercera posición de trabajo; La figura 8 es la vista en sección de la figura 6 en una cuarta posición de trabajo; La figura 9 es la misma vista en sección de la figura 6 en una quinta posición de trabajo; La figura 10 es la misma vista en sección de la figura 6 en una sexta posición de trabajo; La figura 11 es la misma vista en sección de la figura 6 en una séptima posición de trabajo; La figura 12 es la misma vista en sección de la figura 6 en una octava posición de trabajo; La figura 13 es una vista en sección según la línea XIII-XIII de la figura 7; La figura 14 es una vista en sección según la línea XIV-XIV de la figura 8;
La figura 15 es una vista en sección según la línea XV-XV de la figura 12;
La figura 16 es una vista en perspectiva de una parte del aparato que incluye medios de agarre para el recipiente y un sensor para detectar el diámetro del recipiente, mostrándose los medios de agarre en posición abierta; y La figura 17 es una vista en perspectiva similar a la de la figura 16 con los medios de agarre en posición cerrada.
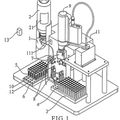
Un destapador o aparato para retirar una tapa de rosca 1 de un recipiente tubular 2 de muestras se representa en las figuras 1-3 y comprende un eje 3 móvil vertical y giratoriamente sobre el cual se monta un conjunto 4 de cabezal por medio de una ménsula 5. El eje 3 está soportado giratoria y deslizablemente por un bastidor fijo 11 y tiene fijado a su extremo inferior un contador óptico 60 que coopera con una regleta óptica 61 (figuras 6-9) para formar un codificador óptico con el fin de detectar la posición vertical del eje 3, permitiendo al conjunto 4 de cabezal autoadaptarse a recipientes de altura variable y ser capaz de comunicar dicha altura a la unidad de control del destapador.
El recipiente 2 de muestras está soportado por un portador 6 y está bloqueado por un dispositivo de agarre 7 que está incluido en el alojamiento 10 y que comprende unos brazos de agarre 8 accionados por unos medios de accionamiento 9 (figuras 1, 2, 16 y 17) .
Un vástago 62 está fijado a uno de los brazos 8 y coopera con dos lectores ópticos 63 y 64 para detectar la posición cerrada o abierta de los brazos de agarre 8 (figuras 16 y 17) .
El bastidor 11 conecta el aparato a un sistema de correa transportadora (no mostrado) sobre el que el portador 6 es móvil con su recipiente 2.
Dicho conjunto 4 de cabezal comprende una envuelta 12 en la que está alojado un motor 13 para accionar un rotor 14 (figura 3) .
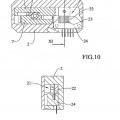
El rotor 14 está provisto de una cavidad 15 que tiene una superficie de apoyo superior 65 (figuras 3, 7, 8, 11 y 12) y unos agujeros radiales periféricos 16 para guiar unas agujas de enganche 17, con unas puntas interiores 30, que son radialmente móviles, con respecto al eje vertical del conjunto 4 de cabezal, mediante un dispositivo neumático 18 incluido en dicho conjunto 4 de cabezal.
Cada aguja 17 gira con el rotor 14 y comprende un miembro 19 de cabezal incluido en una cámara de guiado 20 del rotor 14.
El aparato comprende también un tobogán 21 de desechos para la tapa retirada 1.
Partiendo de la situación de la figura 1, el recipiente 2 de muestras está bloqueado firmemente por los brazos de agarre 8 para garantizar que el recipiente no sea retirado de su portador 6. El bloqueo del recipiente se detecta por el sensor 63, 64 (figuras 16, 17) .
El eje de montaje 3 se eleva ahora (figura 4) y gira aproximadamente 90º hasta que el conjunto 4 de cabezal está sobre la tapa 1 del recipiente 2 (figuras 5-6) .
A continuación, el eje de montaje 3 desciende hasta que la tapa 1 se acopla dentro con la cavidad 15 (figura 7) en apoyo con la superficie superior 65 de la cavidad. El codificador óptico 61, 60 detecta la posición vertical del eje y proporciona una señal eléctrica correspondiente a la unidad de control del sistema de laboratorio automatizado al cual pertenece el aparato destapador. El apoyo proporcionado por la superficie 65 de la cavidad permite que ésta reciba recipientes de tamaño variable.
El codificador 61, 60 detecta la carrera vertical del eje 3, correspondiente a la longitud del recipiente 2, e informa a la unidad de control del sistema de laboratorio.
Las agujas de agarre 17 están aún en una posición exterior de reposo (véase la ventana agrandada de la figura 7 y de la figura 13) .
Una unidad de control ordena al dispositivo neumático 18 que mueva hacia dentro las agujas 17 que atraviesan los agujeros 16 y enganchan la tapa 1 (figura 8) .
La cavidad neumática 18 inyecta aire dentro de la porción externa de la cámara 20 empujando hacia dentro los miembros de cabezal 19 de las agujas 17 (véase la ventana agrandada de la figura 18 y de la figura 14) .
Mediante dichas agujas de agarre 17, la tapa es firmemente agarrada en una pluralidad de puntos en los que la tapa es ligeramente deformada, pero no perforada.
Estas deformaciones permiten un agarre firme por el conjunto 4 de cabezal de la tapa 1 sin dañar las roscas de la tapa 1 y del cabezal del recipiente 2.
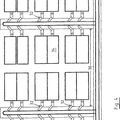
La fuerza de agarre está perfectamente equilibrada debido a que las agujas 17 tienen la misma distancia angular entre ellas y están orientadas hacia el centro de un círculo, definido por la envuelta 12, del cual las agujas 18 son los radios (figura 13-15) .
Dicho aparato está provisto de ocho agujas 17, pero también es posible tener un buen agarre con menos agujas 17, por ejemplo con tres.
Sin embargo, es mejor disponer una pluralidad de agujas 17, particularmente más de cuatro... [Seguir leyendo]
Reivindicaciones:
1. Aparato para retirar tapas (1) de recipientes tubulares (2) de muestras, que comprende un conjunto (4) de cabezal que es móvil por encima de un recipiente (2) de altura variable a lo largo de su eje vertical, teniendo dicho conjunto (4) de cabezal una cavidad receptora (15) de tapas con una superficie de apoyo superior (65) para emparejarse con 5 la superficie superior de la tapa (1) de recipientes (2) de tamaño variable, caracterizado porque dicho conjunto (4) de cabezal está dotado de un rotor (14) que tiene unos agujeros pasantes radiales (16) para guiar radialmente unos medios afilados (17) entre una posición de reposo y una posición de agarre de la tapa (1) del recipiente, induciendo el rotor (14) la rotación de los medios afilados (17) que agarran la tapa (1) con respecto al recipiente fijado en una posición vertical por unos medios de agarre (8) de un bastidor fijo (11) .
2. Aparato según la reivindicación 1, caracterizado porque dichos medios afilados (17) causan una ligera deformación de la tapa (1) en puntos periféricos en los que los medios afilados (17) se acoplan con dicha tapa (1) .
3. Aparato según la reivindicación 1 o 2 caracterizado porque se está dotado de un dispositivo neumático (18) que 15 impulsa radialmente los medios afilados (17) .
4. Aparato según cualquiera de las reivindicaciones precedentes, caracterizado porque dichos medios afilados consisten en agujas de agarre (17) .
5. Aparato según la reivindicación 4, caracterizado porque dichas agujas de agarre (17) comprenden miembros (19) de cabezal alojados en cámaras (20) dispuestas dentro del rotor (14) .
7. Aparato según cualquier reivindicación precedente, caracterizado porque dos sensores (62, 64) están asociados a dichos medios de agarre (8) para detectar sus posiciones cerrada y abierta. 9. Aparato según cualquier reivindicación precedente, caracterizado porque el conjunto (4) de cabezal está montado sobre un eje (3) móvil giratoria y verticalmente que es autoadaptable a cualquier altura del recipiente (2) y es capaz, usando sensores (60, 61) de regleta, de detectar y comunicar la altura de dicho recipiente (2) a una unidad de control. 20 6. Aparato según cualquiera de las reivindicaciones 4-5, caracterizado porque está dotado de tres o más agujas de agarre (17) dispuestas con la misma distancia angular entre ellas, con sus puntas (30) orientadas hacia un centro de un círculo virtual, estando dicho centro sobre el eje del recipiente (2) .
25 8. Aparato según cualquier reivindicación precedente, caracterizado porque se proporciona un sensor (61, 60) para detectar la longitud del movimiento vertical del conjunto (4) de cabezal.
Patentes similares o relacionadas:
 PINZA DE AGARRE DE RECIPIENTE CON UN SENSOR DE POSICIÓN, del 12 de Abril de 2011, de INPECO IP LTD: Una pinza de agarre de un recipiente o contenedor que comprende un bastidor principal y unos miembros de soporte movibles para los dedos de agarre que […]
PINZA DE AGARRE DE RECIPIENTE CON UN SENSOR DE POSICIÓN, del 12 de Abril de 2011, de INPECO IP LTD: Una pinza de agarre de un recipiente o contenedor que comprende un bastidor principal y unos miembros de soporte movibles para los dedos de agarre que […]
 METODO PARA LA GESTION DE SISTEMAS DE CELULA DE TRABAJO BASADO EN UN SISTEMA DE GESTION DE LA AUTOMATIZACION, del 26 de Febrero de 2010, de INPECO S.R.L: Método para la gestión de Sistemas de Célula de Trabajo (WS) usando un Sistema de Gestión de Automatización (AMS) para controlar una pluralidad […]
METODO PARA LA GESTION DE SISTEMAS DE CELULA DE TRABAJO BASADO EN UN SISTEMA DE GESTION DE LA AUTOMATIZACION, del 26 de Febrero de 2010, de INPECO S.R.L: Método para la gestión de Sistemas de Célula de Trabajo (WS) usando un Sistema de Gestión de Automatización (AMS) para controlar una pluralidad […]
 APARATO Y METODO PARA MANEJAR FLUIDOS PARA ANALISIS, del 17 de Febrero de 2010, de ABBOTT LABORATORIES: Un dispositivo de manejo de espécimen, que incluye: una plataforma que tiene una pluralidad de posiciones definidas en la misma, incluyendo una pluralidad de […]
APARATO Y METODO PARA MANEJAR FLUIDOS PARA ANALISIS, del 17 de Febrero de 2010, de ABBOTT LABORATORIES: Un dispositivo de manejo de espécimen, que incluye: una plataforma que tiene una pluralidad de posiciones definidas en la misma, incluyendo una pluralidad de […]
 DISPOSITIVO PARA LA EXTRACCION AUTOMATICA DE MUESTRAS DE LIQUIDO DE RECIPIENTES COLECTORES Y PROCEDIMIENTO PARA REALIZAR DICHA EXTRACCION, del 25 de Enero de 2010, de GRIFOLS, S.A: Dispositivo para la extracción automática de muestras de líquido de recipientes colectores y procedimiento para realizar dicha extracción.
Dispositivo para […]
DISPOSITIVO PARA LA EXTRACCION AUTOMATICA DE MUESTRAS DE LIQUIDO DE RECIPIENTES COLECTORES Y PROCEDIMIENTO PARA REALIZAR DICHA EXTRACCION, del 25 de Enero de 2010, de GRIFOLS, S.A: Dispositivo para la extracción automática de muestras de líquido de recipientes colectores y procedimiento para realizar dicha extracción.
Dispositivo para […]
Dispositivos modulares para puntos de atención y usos de los mismos, del 29 de Julio de 2020, de Labrador Diagnostics LLC: Un sistema para la detección automatizada de un analito a partir de una muestra de fluido corporal, que comprende: un dispositivo de fluidos que comprende: […]
 Dispositivo de análisis y método para examinar una muestra, del 29 de Julio de 2020, de BOEHRINGER INGELHEIM VETMEDICA GMBH: Dispositivo de análisis para probar una muestra (P) biológica particular por medio de un cartucho que puede ser recibido,
comprendiendo el dispositivo […]
Dispositivo de análisis y método para examinar una muestra, del 29 de Julio de 2020, de BOEHRINGER INGELHEIM VETMEDICA GMBH: Dispositivo de análisis para probar una muestra (P) biológica particular por medio de un cartucho que puede ser recibido,
comprendiendo el dispositivo […]
Selección automática de microorganismos e identificación usando MALDI, del 22 de Julio de 2020, de BD Kiestra B.V: Un método que comprende: - proporcionar una placa de cultivo que comprende una cantidad de colonias de microorganismos ; - obtener […]
Sistema y método para suministrar un portamuestras de laboratorio a partir de una pila de portamuestras a un aparato para marcar portamuestras de laboratorio, del 22 de Julio de 2020, de Pyramid Innovation Ltd: Combinación de un dispositivo para suministrar un portamuestras de laboratorio a partir de una pila de portamuestras, y un aparato […]