DISPOSITIVO Y PROCEDIMIENTO DE DESACTIVACIÓN AUTOMÁTICO DEL FRENO DE APARCAMIENTO AUTOMÁTICO EN EL ARRANQUE.
Un procedimiento de asistencia en el arranque de un vehículo que incluye un grupo motopropulsor y un Freno de Aparcamiento Automático equipado con un medio para ejecutar una orden de desaplicación o de desactivación del freno de aparcamiento automático,
caracterizado porque consiste en ejecutar, al menos después de una fase de arranque del grupo motopropulsor: • Una etapa de estimación de un valor de par transmitido (ECT-umbral) que equilibra el vehículo en la pendiente; • Un bucle que consiste en ejecutar un cálculo incremental de una estimación del par transmitido realmente (ECT) en el instante dado mientras que la estimación del par transmitido realmente (ECT) es insuficiente para sobrepasar la estimación de par transmitido (ECT-umbral); luego • Una etapa de producción de una orden de desaplicación o de desactivación del Freno de Aparcamiento Automático
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2003/001897.
Solicitante: RENAULT S.A.S..
Nacionalidad solicitante: Francia.
Dirección: 13-15 QUAI ALPHONSE LE GALLO 92100 BOULOGNE BILLANCOURT FRANCIA.
Inventor/es: DEVAUD,EMMANUEL, DEPREZ,Philippe, PLANCHON,Philippe, SPOORMANS,Thomas.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Junio de 2003.
Clasificación Internacional de Patentes:
- B60T11/10D2
- B60T13/66B
- B60T13/74 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 13/00 Transmisión de la acción de frenado entre el órgano de iniciación y los órganos terminales de acción, con potencia de frenado asistida o con relé de potencia; Sistemas de frenos que incluyen esos medios de transmisión, p. ej. sistemas de frenado de presión de aire. › con accionamiento o asistencia eléctrica.
- B60T7/00 B60T […] › Organos de iniciación de la acción de los frenos.
- B60T7/12B
- B60W10/06 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de motores de combustión.
- B60W10/18 B60W 10/00 […] › incluyendo el control de sistemas de frenado.
- B60W30/18R1
Clasificación PCT:
- B60T13/74 B60T 13/00 […] › con accionamiento o asistencia eléctrica.
- B60T7/00 B60T […] › Organos de iniciación de la acción de los frenos.
- B60T7/12 B60T […] › B60T 7/00 Organos de iniciación de la acción de los frenos. › por desencadenamiento automático; por desencadenamiento no sometido a la voluntad del conductor o del pasajero.
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W10/18 B60W 10/00 […] › incluyendo el control de sistemas de frenado.
- B60W30/18 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Propulsión del vehículo.
Clasificación antigua:
- B60K41/20
- B60T11/10 B60T […] › B60T 11/00 Transmisión de la acción de frenado entre el órgano de iniciación y los órganos terminales de acción, en la cual la transmisión no es ni asistida ni mediante relé de potencia, o en la cual tal asistencia o tal relé no son esenciales. › Transmisión por fluido, p. ej. hidráulico.
- B60T13/66 B60T 13/00 […] › Control eléctrico de los sistemas de frenos de fluido bajo presión.
- B60T13/74 B60T 13/00 […] › con accionamiento o asistencia eléctrica.
- B60T7/04 B60T 7/00 […] › accionados con el pie.
- B60T7/10 B60T 7/00 […] › Disposición del mango de control.
- B60T7/12 B60T 7/00 […] › por desencadenamiento automático; por desencadenamiento no sometido a la voluntad del conductor o del pasajero.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356907_T3.pdf


Fragmento de la descripción:
El presente invento se refiere a un procedimiento y a un dispositivo de desaplicación o desactivación automático del freno de aparcamiento automático en el arranque o puesta en marcha.
En el estado de la técnica, se ha propuesto ya realizar frenos de aparcamiento eléctricos que reemplazan a los frenos de aparcamiento manuales, véase ejemplo el documento WO-A-89/01887.
El freno de aparcamiento eléctrico está asociado a un calculador que permite, en función de diversas señales de funcionamiento del vehículo, realizar su desaplicación automática sin intervención directa del conductor.
En el estado de la técnica, también se ha propuesto un sistema de asistencia al arranque en cuesta, utilizando el freno de aparcamiento automático, y que se funda en particular sobre la detección del grado de hundimiento del pedal del embrague para deducir de ello el par motor disponible en la rueda por una parte, y por otra parte en la intención del conductor de realizar un despegue del vehículo mientras que este último es mantenido en la pendiente por el accionamiento del freno de aparcamiento automático.
El sistema anterior funciona de manera correcta.
Sin embargo, los inventores han constatado que la solución presentaba un cierto coste que convenía reducir. Se han dado cuenta de que la supresión del captador de posición del pedal de embrague es un medio que permite reducir este coste.
En el mismo orden de ideas, en la solución precedentemente desarrollada, la utilización de la información de la posición del pedal de embrague debe ser transformada en un valor de par transmitido a la rueda, lo que complica en particular los medios de cálculo del controlador de desaplicación del freno de aparcamiento automático cuando este último trabaja en asistencia al arranque en cuesta.
Para remediar estos inconvenientes del estado de la técnica, el presente invento se refiere a un procedimiento de asistencia en el arranque de un vehículo que incluye un grupo motopropulsor y un Freno de Aparcamiento Automático equipado con un medio para ejecutar una orden de desaplicación o de desactivación del freno de aparcamiento. El procedimiento del invento consiste en ejecutar, al menos después de una fase de arranque del grupo motopropulsor:
Una etapa de estimación de un valor de par transmitido que equilibra el vehículo en la pendiente;
Un bucle que consiste en ejecutar un cálculo del incremento de una estimación del par transmitido realmente en
el instante dado mientras la estimación del par transmitido realmente es insuficiente para sobrepasar la
estimación de par transmitido; y luego
Una etapa de producción de una orden de desaplicación o de desactivación del Freno de Aparcamiento Automático.
Según un aspecto del procedimiento, la etapa de estimación de un valor de par transmitido que equilibra el vehículo en la pendiente incluye una etapa para calcular un modelo estático del vehículo en la pendiente a partir de una medida de un ángulo de inclinación entregada por un captador de pendiente y del conocimiento de un valor determinado representativo de la relación de transmisión.
Según un aspecto del procedimiento, al ser la medida de un ángulo de inclinación inferior a un umbral dado, la estimación de un valor de par transmitido que equilibra el vehículo en la pendiente es aumentada en un valor determinado.
Según un aspecto del procedimiento, el valor determinado de aumento de la estimación de un valor de par transmitido que equilibra el vehículo en la pendiente depende de la medida del ángulo de inclinación.
Según un aspecto del procedimiento, la etapa de cálculo incremental contiene:
- una etapa de lectura de un valor de par medio eficaz asociado al estado dinámico del grupo motopropulsor;
- una etapa de lectura de un valor de régimen del motor;
- una etapa de cálculo de la derivada temporal del régimen motor;
- una etapa de determinación del momento de inercia del grupo motopropulsor y de cálculo del par resistente en forma de un producto del momento de inercia del grupo motopropulsor por la derivada temporal del régimen motor;
- una etapa de determinación de una estimación de par transmitido según una relación de la forma: ECT = Cme –
dWm
Jmot x .
dt
Según un aspecto del procedimiento, se ha previsto una etapa de resincronización de la lectura de un valor de par medio eficaz y de un valor de régimen del motor de manera que cada par de valores (Cme, Wm) corresponde a un mismo intervalo de tiempo.
Según un aspecto del procedimiento, se ha previsto añadir un retardo predeterminado, preferentemente igual a tres períodos de paso al Punto Muerto Alto del motor térmico del grupo motopropulsor, sobre el valor de resincronización del valor de par medio estimado para tener en cuenta en particular el retardo de espera de llenado del colector y de la ejecución del encendido.
Según un aspecto del procedimiento, la etapa de resincronización consiste en aplicar la resincronización sobre el valor derivado D_Wm del régimen motor Wm entre dos muestras separadas por una duración de resincronización en particular según la relación: D_Wm = [Wm(8)-Wm(1)]/duración, en la que «duración» determina el período de resincronización y Wm(1) y Wm(8) los valores de comienzo y de fin del período de resincronización.
Según un aspecto del procedimiento, la etapa de estimación de par transmitido (ECT) incluye la comparación de un valor de estimación de par transmitido (ECT) con un valor predeterminado de umbral (ECTumbral) de manera que si el umbral es sobrepasado un ensayo de un contador incrementado durante cada etapa de estimación de par transmitido (ECT) con relación a un umbral predeterminado (Smin_loop_Delay), de manera que si el umbral sobre el contador es sobrepasado se genere una orden de autorización de desaplicación del Freno de Aparcamiento Automático.
Según un aspecto del procedimiento, la etapa de estimación de par transmitido ECT incluye además una etapa de desplazamiento o desfase predeterminada de manera que se reduzca el efecto perturbador de la puesta en marcha y de la parada de ciertos consumidores secundarios (Consumidores) de energía o de potencia proporcionada por el motor térmico, efectuando la operación:
ECT_Corr_k = ECT_k + g(Consumidores)
de modo que se determine la zona en la que el motor puede ser considerado como en reposo y la zona durante la cual puede ser realizado un desfase o desplazamiento g(Consumidores) sobre la estimación de par transmitido. Según el invento, cuatro criterios o ensayos son realizados simultáneamente para llegar a tal desfase.
Según un aspecto del procedimiento, el desfase es efectuado al final de un ensayo en el transcurso de la cual se combinan cuatro condiciones:
Wm ≤ Smax_Wm_idle
ABS(D_Wm) ≤ Smax_D_M_idle
THETA_Acc ≤ Smax_acc_idle
D_Acc ≤ 0.
Condiciones en las que:
Smax_Wm_idle representa un valor de umbral por debajo del cual el régimen motor indica que el motor está en estado de reposo o régimen de ralentí;
Smax_D_M_idle representa un valor de umbral por debajo del cual el valor absoluto ABS(D_Wm) de la derivada temporal del régimen motor D_Wm indica que el motor está en estado de reposo o régimen de ralentí;
Smax_acc_idle representa un valor de umbral por debajo del cual el grado de hundimiento del pedal del acelerador THETA_Acc indica que el motor está en el estado de reposo o régimen de ralentí;
D_Acc representa la derivada temporal del grado de hundimiento THETA_Acc del pedal del acelerador que es negativa cuando el conductor levanta el pie del pedal del acelerador;
de manera que si el ensayo es negativo, el control vuelve a la inicialización de un contador CPTR, suponiéndose que el grupo motopropulsor no está conectado a las ruedas motrices;
y de manera que si el ensayo es positivo, el control pasa a un ensayo en el que se mira si el contador CPTR es inferior a un valor de umbral CPTR_umbral predeterminado;
de manera que si el ensayo es positivo, el control pasa a una etapa en el transcurso de la cual un valor de... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de asistencia en el arranque de un vehículo que incluye un grupo motopropulsor y un Freno de Aparcamiento Automático equipado con un medio para ejecutar una orden de desaplicación o de desactivación del freno de aparcamiento automático, caracterizado porque consiste en ejecutar, al menos después de una fase de arranque del grupo motopropulsor:
Una etapa de estimación de un valor de par transmitido (ECT-umbral) que equilibra el vehículo en la pendiente;
Un bucle que consiste en ejecutar un cálculo incremental de una estimación del par transmitido realmente (ECT)
en el instante dado mientras que la estimación del par transmitido realmente (ECT) es insuficiente para
sobrepasar la estimación de par transmitido (ECT-umbral); luego
Una etapa de producción de una orden de desaplicación o de desactivación del Freno de Aparcamiento Automático.
2. Un procedimiento según la reivindicación 1, caracterizado porque la etapa de estimación de un valor de par transmitido que equilibra el vehículo en la pendiente incluye una etapa para calcular un modelo estático del vehículo en la pendiente a partir de una medida de un ángulo de inclinación entregada por un captador de pendiente (7) y del conocimiento de un valor determinado representativo de la relación de transmisión.
3. Un procedimiento según la reivindicación 2, caracterizado porque, al ser la medida de un ángulo de inclinación inferior a un umbral dado, la estimación de un valor de par transmitido que equilibra el vehículo en la pendiente es aumentada en un valor determinado.
4. Un procedimiento según la reivindicación 3, caracterizado porque el valor determinado de aumento de la estimación de un valor de par transmitido que equilibra el vehículo en la pendiente depende de la medida del ángulo de inclinación.
5. Un procedimiento según la reivindicación 1, caracterizado porque la etapa de cálculo incremental (32) incluye:
- una etapa de lectura de un valor de par medio eficaz (Cme) asociado al estado dinámico del grupo motopropulsor;
- una etapa de lectura de un valor de régimen del motor (Wm);
- una etapa de cálculo de la derivada temporal del régimen motor;
- una etapa de determinación del momento de inercia del grupo motopropulsor (Jmot) y de cálculo del par resistente en forma de un producto del momento de inercia del grupo motopropulsor por la derivada temporal del régimen motor;
- una etapa de determinación de una estimación de par transmitido según una relación de la forma: ECT = Cme –
dWm
Jmot x .
dt
6. Un procedimiento según la reivindicación 5, caracterizado porque incluye una etapa de resincronización de la lectura de un valor de par medio eficaz (Cme) y de un valor de régimen del motor (Wm) de manera que cada par de valores (Cme, Wm) corresponde a un mismo intervalo de tiempo.
7. Un procedimiento según la reivindicación 6, caracterizado porque consiste en añadir un retardo predeterminado, preferentemente igual a tres períodos de paso al Punto Muerto Alto del motor térmico del grupo motopropulsor, sobre el valor de resincronización del valor de par medio estimado para tener en cuenta en particular el retardo de espera de llenado del colector y de la ejecución del encendido.
8. Un procedimiento según la reivindicación 6 ó 7, caracterizado porque la etapa de resincronización consiste en aplicar la resincronización sobre el valor derivado (D_Wm) del régimen motor (Wm) entre dos muestras separadas por una duración de resincronización en particular según la relación: D_Wm = [Wm(8)-Wm(1)]/duración, en la que «duración» determina el período de resincronización y Wm(1) y Wm(8) los valores de comienzo y de fin del período de resincronización.
9. Un procedimiento según una de las reivindicaciones 5 a 8, caracterizado porque la etapa de estimación de par transmitido (ECT) incluye:
- una etapa (S4) de comparación de un valor de estimación de par transmitido (ECT) con un valor predeterminado
de umbral (ECTumbral);
- si el valor predeterminado de umbral (ECTumbral) es sobrepasado, una etapa (S5) de ensayo del valor de salida de un contador (S3), incrementado durante cada etapa de estimación de par transmitido (ECT), con relación a un valor de umbral predeterminado (Smin_loop_Delay),
- si el valor de umbral predeterminado (Smin_loop_Delay) es sobrepasado, una etapa de producción de una orden de autorización de desaplicación del Freno de Aparcamiento Automático.
10. Un procedimiento según la reivindicación 9, caracterizado porque la etapa de estimación de par transmitido ECT incluye además una etapa para ejecutar un desfase o desplazamiento predeterminado de manera que se reduzca el efecto perturbador de la puesta en marcha y de la parada de ciertos consumidores secundarios (Consumidores) de energía o de potencia proporcionada por el motor térmico, efectuando la operación:
ECT_Corr_k = ECT_k + g(Consumidores)
Una etapa previa para determinar una región en la que el motor puede ser considerado como en reposo y una región durante la cual puede ser ejecutado un desfase o desplazamiento g(Consumidores) sobre la estimación de par transmitido.
11. Un procedimiento según la reivindicación 10, caracterizado porque la etapa para ejecutar un desfase es efectuada a la salida de un ensayo (103) en el transcurso del cual se combinan cuatro condiciones:
Wm ≤ Smax_Wm_idle
ABS(D_Wm) ≤ Smax_D_M_idle
THETA_Acc ≤ Smax_acc_idle
D_Acc == 0.
condiciones en las que:
Smax_Wm_idle representa un valor de umbral por debajo del cual el régimen motor indica que el motor está en estado de reposo o régimen de ralentí;
Smax_D_M_idle representa un valor de umbral por debajo del cual el valor absoluto ABS(D_Wm) de la derivada temporal del régimen motor D_Wm indica que el motor está en estado de reposo o régimen de ralentí;
Smax_acc_idle representa un valor de umbral por debajo del cual el grado de hundimiento del pedal del acelerador THETA_Acc indica que el motor está en estado de reposo o régimen de ralentí;
D_Acc representa la derivada temporal del grado de hundimiento THETA_Acc del pedal del acelerador que es negativa cuando el conductor levanta el pie del pedal del acelerador;
de manera que si el ensayo (103) es negativo, el control vuelve a la inicialización (102) de un contador (CPTR), suponiéndose que el grupo motopropulsor no está conectado a las ruedas motrices;
y de manera que si el ensayo (103) es positivo, el control pasa a un ensayo (104) en el que se mira si el contador (CPTR) es inferior a un valor de umbral (CPTR_umbral) predeterminado;
de manera que si el ensayo (104) es positivo, el control pasa a una etapa (105) en el transcurso de la cual un valor de desfase «desplazamiento», inicialmente nulo cuando el contador (CPTR) es a su vez inicializado en la etapa (102), es aumentado en el valor de la estimación ECT en curso;
luego, el valor de contador (CPTR) es incrementado en un paso durante una etapa (106) y el control vuelve a la etapa de ensayo (103);
de manera que si el ensayo (104) es negativo, el valor desplazamiento es transmitido a una rutina (107) de cálculo de un valor de desfase de la estimación de par transmitido ECT, valor de desfase indicado «offset_ECT» que es igual a la relación del valor «desplazamiento» calculado durante la etapa (105) con el valor (CPTR_umbral) del contador.
12. Un procedimiento según una de las reivindicaciones precedentes, caracterizado porque incluye una etapa para producir una información de actividad del conductor de manera que sea rechazada la desaplicación del Freno de Aparcamiento Automático en caso de ascenso del pedal del acelerador.
13. Un procedimiento según una de las reivindicaciones precedentes, caracterizado porque incluye una etapa para detectar una solicitud de arranque mientras el grupo motopropulsor no está embragado.
14. Un procedimiento según la reivindicación 13, caracterizado porque la etapa consiste, sin utilizar captador de hundimiento del pedal del embrague, en detectar el estado embragado con la ayuda de dos cartografías de la estimación de par transmitido en función del grado de hundimiento del pedal de acelerador respectivamente establecidas cuando las ruedas están embragadas y cuando las ruedas no están embragadas y comparando el valor de la estimación de par transmitido a cada uno de los valores de cartografías dirigidas por la medida del grado de hundimiento del pedal del acelerador para, si la comparación con la primera cartografía es positiva producir una información característica de un estado desembragado y si la comparación con la segunda cartografía es positiva producir una información característica de un estado embragado.
15. Un procedimiento según la reivindicación 13, caracterizado porque la etapa consiste, utilizando un captador de hundimiento del pedal de embrague en todo o nada, en producir una información característica de un estado embragado o desembragado.
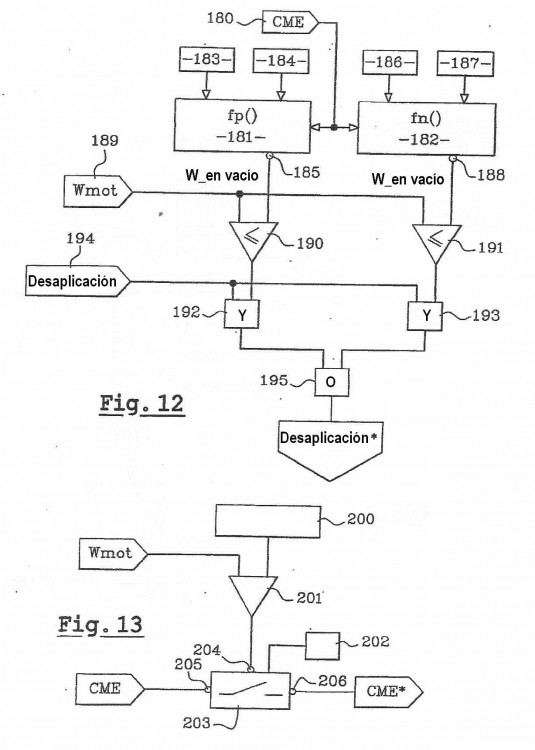
16. Un procedimiento según una de las reivindicaciones precedentes, caracterizado porque incluye una etapa para detectar el régimen en vacío, que consiste en:
- comparar la información de par motor estimado (Cme) con dos funciones de estimación de régimen en vacío en rotación positiva fp() y en rotación con una estimación de par transmitido negativa fn ();
- en aplicar a la función fp() una ganancia (G_Cme_PV) en vacío aplicada sobre el par motor estimado (Cme), un desfase (Offset_Cme_PV) sobre el valor de par motor estimado en posición en vacío, y el valor en curso (Cme) para producir un valor de régimen en vacío en rotación con una estimación de par transmitido positiva a priori;
- en aplicar a la función fn() una ganancia (G_Cme_NV) en vacío aplicada sobre el par motor estimado (Cme), un desfase (Offset_Cme_NV) sobre el valor de par motor estimado en posición en vacío, y el valor en curso (Cme) para producir un valor de régimen en vacío en rotación con una estimación de par transmitido negativa a priori;
- en comparar el valor del régimen motor (Wm) para determinar si se encuentra en un régimen en vacío, en rotación con una estimación de par transmitido positiva o con una estimación de par transmitido negativa;
- en autorizar la desaplicación del Freno de Aparcamiento Automático solamente si no se ha detectado ningún régimen en vacío.
17. Un procedimiento según una de las reivindicaciones precedentes, caracterizado porque incluye una etapa de detección de saturación del motor térmico en régimen alto de manera que se prohíba la desaplicación del Freno de Aparcamiento Automático en régimen de saturación.
18. Un procedimiento según una de las reivindicaciones precedentes, caracterizado porque incluye una etapa para producir un servicio de arranque «en llano» sin umbral sobre el apoyo del pedal del acelerador que consiste:
- en producir una orden de desaplicación del freno de aparcamiento sobre la única determinación de que la estimación de par transmitido ECT es superior al umbral predeterminado ECTumbral y, particularmente sin ensayar un umbral sobre el aprieto del pedal del acelerador;
- en inicializar una variable de estado durante la puesta en marcha del vehículo para indicar que el pedal del acelerador no ha sido aún hundido, estando representada la variable por Acc_Was_NonZero = 0;
- en leer una variable representativa del estado en reposo del motor (Reposo);
- en tratar la variable Acc_Was_NonZero de manera que permanezca en «1» desde que el acelerador ha sido apretado y hasta que la variable de Reposo vuelve a «1»;
y porque consiste entonces en autorizar el arranque «en llano» cuando la variable Acc_Was_Nonzero vale «0» y en ensayar que la estimación de par transmitido ECT es superior a un valor de umbral ECTUmbral para autorizar la desaplicación del Freno de Aparcamiento Automático y asegurar así el despegue del vehículo reteniéndole sobre una cierta región de aceleración.
19. Un procedimiento según la reivindicación 18, caracterizado porque consiste en extender el servicio de arranque «en llano» a un servicio de arranque en descenso, con la primera marcha engranada.
20. Un procedimiento según la reivindicación 18, caracterizado porque consiste en extender el servicio de arranque «en llano» a un servicio de arranque en descenso, con la marcha atrás engranada.
21. Un procedimiento según una de las reivindicaciones precedentes, caracterizado porque incluye una etapa de detección de un exceso de cabeceo y una etapa para prohibir la desaplicación del Freno de Aparcamiento Automático en situación de arranque si el cabeceo del vehículo aplicado por ejemplo por un movimiento demasiado importante de los pasajeros del vehículo sobrepasa un cierto umbral predeterminado.
22. Un procedimiento según una de las reivindicaciones precedentes, caracterizado porque incluye una etapa para determinar un término de anticipación sobre la orden de desaplicación del Freno de Aparcamiento Automático en función de valores predeterminados de anticipación que consiste, durante la elaboración de la orden de desaplicación del Freno de Aparcamiento Automático, en ejecutar también una etapa de medida del grado de hundimiento del pedal del acelerador Teta_Acc, luego en medir una derivada temporal de la señal Teta_Acc del grado de hundimiento, o sea D_Acc, y en comparar este valor instantáneo de derivada D_Acc con un umbral predeterminado Umbral_Anticipo, de manera que si la velocidad de variación del grado de hundimiento D_Acc es superior a un valor Umbral_Anticipo, el bucle de incremento del valor de estimación de par transmitido ECT sea interrumpido antes de que el ensayo (33; Fig. 2) sea verdadero y para producir de manera anticipada la orden de desaplicación del Freno de Aparcamiento Automático.
23. Un dispositivo de asistencia al arranque en cuesta de un vehículo que incluye un grupo motopropulsor y un Freno de Aparcamiento Automático equipado con un medio (7, 8) para ejecutar una orden de desaplicación o de desactivación del freno de aparcamiento, que pone en práctica el procedimiento según al menos una de las reivindicaciones precedentes, caracterizado porque incluye esencialmente un calculador (5) de una orden de desaplicación conectado a un captador (7) del grado de pendiente en la cual se encuentra situado el vehículo y a un captador que entrega una información sobre el régimen o velocidad de rotación del grupo motopropulsor del vehículo y caracterizado por el hecho de que el calculador (5) incluye un medio de estimación del par transmitido (ECT) conectado a una primera entrada de un medio de comparación del que una segunda entrada está conectada a un medio para producir un valor de umbral de par transmitido correspondiente al mantenimiento del vehículo, de manera que un terminal de salida de dicho medio de comparación produzca una orden de desaplicación (11) con destino al freno de aparcamiento eléctrico (7, 8).
24. Un dispositivo según la reivindicación 23, caracterizado porque incluye:
un primer módulo de lectura del par medio eficaz Cme que es proporcionado por un calculador (3) del motor en forma de una información que circula sobre el bus (1) del vehículo,
un segundo módulo de lectura de la velocidad instantánea Wm de rotación del motor térmico que es proporcionada por el calculador del motor (3) en forma de una información que circula sobre el bus (1) del vehículo,
dWm
un tercer módulo que permite calcular la derivada temporal de la velocidad de rotación a la salida del grupo
dt
motopropulsor a partir del dato de la velocidad de rotación o régimen motor tomado por el segundo módulo;
un cuarto módulo para calcular el producto de un valor del momento de inercia Jmot característico de la inercia del motor así como el valor de salida de dicho tercer módulo;
un quinto módulo para sustraer el valor de salida del cuarto módulo, presentado en una entrada de sustracción del
quinto módulo, del valor de salida de dicho primer módulo de manera que en su salida sea presentado un valor
instantáneo de la estimación de par transmitido instantáneo producido según una relación: ECT = Cme – Jmot x
dWm
.
dt
25. Un dispositivo según una de las reivindicaciones 23 ó 24, caracterizado porque, al ser los valores de par motor estimado (Cme) y de régimen motor (Wm) suministrados sobre tramos de un bus (1) por un calculador de control del motor (3), incluye un circuito de resincronización (67).
26. Un dispositivo según la reivindicación 25, caracterizado porque el circuito de resincronización (67) incluye:
- una memoria que contiene una tabla sobre un ciclo de pares de datos de manera que sea asociado el número de orden de un valor representativo de una primera palabra recibida sobre su primera entrada con un número de orden de un valor representativo del número de orden de una segunda palabra recibida,
- registros de series de valores sucesivos de la primera palabra y o de la segunda palabra y
- un medio, para, en función de las asociaciones de números de orden de la memoria precitada para aplicar a la salida un par de una primera palabra y de una segunda palabra correspondiente a un solo y mismo momento de cálculo y para presentar el par de palabras resincronizadas es en terminales de salida (68, 69).
27. Un dispositivo según la reivindicación 25 ó 26, caracterizado porque el circuito de resincronización (67) trabaja esencialmente sobre el régimen motor y permite explotar un desfase en el mecanismo de puesta a disposición de pares de palabras (Cme, Wm) un efecto característico durante la aceleración del motor térmico y que incluye:
un registro de sincronización (70) de la estimación de par transmitido (Cme);
un secuenciador (71) que recibe una señal (56) indicativa de punto muerto alto y que transmite órdenes de escritura (72) y de lectura (73) al registro (70);
un registro (74) de un valor disponible de estimación del par transmitido sincronizado;
una pila (76) de registros en la que es mantenida una pluralidad de valores sucesivos del régimen motor (Wm) adquiridos en instantes sucesivos sobre el bus CAN (1);
un circuito diferenciador (79) que incluye:
- una entrada positiva conectada a una salida de lectura de la pila (76) sobre la que está disponible el valor más antiguo del régimen motor Wm mantenido en la pila (76), y
- una entrada negativa a la que está conectado el valor más reciente del régimen motor disponible también sobre el terminal de entrada (66) del módulo (67);
- una entrada (80) que recibe un valor representativo «duración» de la duración transcurrida durante la adquisición entre el valor más antiguo, y el valor más reciente de manera que en la salida (81) del circuito diferenciador (79) esté disponible un valor representativo de un valor sincronizado de la derivada temporal media del régimen motor según una relación de la forma:
D_Wm = [Wm(8)-Wm(1)]/duración.
cargada en un registro (82).
28. Un dispositivo según la reivindicación 27, caracterizado porque un terminal de mando de escritura del registro (82) que mantiene un valor sincronizado de la derivada temporal media del régimen motor está conectado al secuenciador (71) que gestiona un registro (86) en el que es registrado un valor de desfase temporal o retraso ∆T que corresponde a un retraso deseado de transmisión de los valores sincronizados al resto del estimador de manera que se pueda tener en cuenta en particular:
- el retardo de llenado del colector del motor térmico, y
- el retardo de encendido cuando el motor térmico está en fase de aceleración como es el caso durante un arranque en cuesta.
29. Un dispositivo según la reivindicación 24, caracterizado porque incluye un contador (90) que mantiene un valor numérico CPTR y lo actualiza en cada acontecimiento presentado en su entrada indicada «+» aumentándolo en un valor predeterminado como «1»;
una entrada (91) sobre la que es cargado el valor ECT_k un valor en curso de incremento de la estimación de par transmitido y que está conectada, por una parte, a la entrada de un circuito (93) de detección de la llegada de un valor ECT_k y a una primera entrada de un comparador (92);
la salida de detección del módulo (93) de detección de llegada de una muestra ECT_k está conectada a la entrada “+” de mando de incremento del contador (90) cuyo terminal de salida de lectura está conectado a una primera entrada de un comparador (93);
un registro (94) que contiene un valor de umbral ECTumbral, y transmitido a una segunda entrada del comparador (92);
el comparador (92) incluye una primera salida (96) y una segunda salida (95), complementarias una de la otra, de modo que si el ensayo realizado por el comparador (92) es positivo, la primera salida (96) pasa al estado activo y es conectada a una primera entrada de una puerta Y (97), mientras que la segunda salida (95) pasa al estado inactivo y es conectada a un terminal de entrada de reposición a un valor inicial como el valor “0” del contador (90);
un segundo comparador (98) cuya primera entrada recibe el valor de cómputo CPTR disponible en el contador
(90) y del que una segunda entrada está conectada a un registro (99) que mantiene el valor de cómputo máximo a la salida del cual puede ser ejecutada la autorización de desaplicación;
de manera que, cuando el ensayo realizado por el segundo comparador (98) es positivo, su salida pasa al estado activo y es conectada a una segunda entrada de la puerta Y (97) de modo que la salida (100) de la puerta Y (97) pasa al estado activo para indicar una autorización de desaplicación del Freno de Aparcamiento Automático.
30. Un dispositivo según la reivindicación 29, caracterizado porque incluye un registro (99) que contiene un valor (Smin_Lop_Delay) determinado en función del período de muestreo o cadencia de bucle y del retraso o retardo deseado entre la primera superación por el valor de par transmitido estimado ECT del valor de umbral ECTumbral y la realización de la orden de desaplicación del freno de aparcamiento FPA, incluyendo el registro (99) un medio de escritura de un valor así determinado de Smin_Lop_Delay que es activado durante la inicialización del vehículo o bien durante su fabricación o durante su mantenimiento con la ayuda de un útil de producción conocido por el experto en la técnica, o bien durante la detección de un tipo de conductor realizada con la ayuda del calculador de a bordo 1 que transmite sobre el bus 1 un valor característico de Smin_Lop_Delay asociado al conductor detectado con la ayuda por ejemplo de la llave de puesta en marcha o del tipo de conductor según un algoritmo de detección del tipo de conducción efectuada por el conductor.
31. Un dispositivo según la reivindicación 30, caracterizado porque con la ayuda de un sumador que efectúa la operación: ECT_Corr_k = ECT_k + g(Consumidores), el valor de estimación de par transmitido ECT recibido en el terminal
(91) recibe además un desfase predeterminado de manera que reduzca el efecto perturbador de la puesta en marcha y de la parada de ciertos consumidores secundarios de energía o de potencia proporcionada por el motor térmico, desfase efectuado aguas arriba del circuito (91) de detección y de la entrada del comparador (92).
32. Un dispositivo según la reivindicación 31, caracterizado porque incluye un circuito para ejecutar un desfase según el estado de régimen en vacío o en carga.
33. Un dispositivo según una de las reivindicaciones 23 a 32, caracterizado porque incluye un circuito (150-172) para detectar la actividad del conductor con ayuda de dos comparadores (151, 152) de la derivada temporal (D_Acc) del grado de hundimiento del pedal de acelerador en un intervalo de grado de hundimiento (Smin_D_Acc_TakeOff, Smax_D_Acc_TakeOff) en dos registros (153, 154) y con ayuda de una puerta Y (156) para validar la orden de desaplicación del freno de Aparcamiento Automático.
34. Un dispositivo según una de las reivindicaciones 23 a 33, caracterizado porque incluye un circuito (160–172) para detectar el estado embragado o no embragado del grupo motopropulsor con ayuda de una pluralidad de cartografías (163, 164) que contienen una serie de valores de estimación de par transmitido (ECT) en función del grado de hundimiento del pedal de acelerador establecidos según que el embragado esté o no activo, con ayuda de una puerta Y
(171) para validar la producción de la orden de desaplicación del freno de Aparcamiento Automático en función del tipo de conductor, del grado de hundimiento del pedal de acelerador (TETA_Acc) y de la estimación de par transmitido (ECT), validando una puerta Y (171) la orden de desaplicación del Freno de Aparcamiento Automático.
35. Un dispositivo según una de las reivindicaciones 23 a 34, caracterizado porque incluye un circuito (180-195) para detectar el estado en vacío del vehículo según el sentido de rotación que incluye dos generadores (181, 182) de una función que determina el régimen motor en vacío, conectados a dos comparadores (190, 191) del valor instantáneo del régimen motor (Wm), y de dos puertas Y (192, 193) para validar una orden de desaplicación del freno de Aparcamiento Automático.
36. Un dispositivo según una de las reivindicaciones 23 a 35, caracterizado porque incluye un circuito (200-206) para determinar un estado de saturación del motor térmico que incluye un comparador (201) para determinar si el régimen motor (Wm) y para aplicar o no un valor corregido en un medio de corrección (202, 203) de valores de par motor estimado (Cme).
37. Un dispositivo según una de las reivindicaciones 23 a 36, caracterizado porque incluye un circuito para poner en práctica un servicio de arranque «en llano» que incluye esencialmente:
- un circuito para activar el servicio de arranque en llano durante la configuración del vehículo en la producción, en el mantenimiento o durante la detección del tipo de conductor o del conductor cuando este último se sitúa en el vehículo que produce una señal lógica de «0» si el servicio no está implantado y de «1» si el servicio está implantado;
- un circuito de detección de situación «en llano» para detectar que la señal representativa del ángulo de inclinación producida por el captador de ángulo de pendiente (7) es en valor absoluto inferior a un valor de umbral registrado en un registro conveniente y representativo del límite de situación «en llano»;
- una primera puerta Y para combinar las señales de salida del circuito para activar el servicio de arranque en llano y del circuito de detección de situación «en llano»;
- un circuito para elaborar la variable Acc_Was_NonZero que incluye un comparador del grado de hundimiento del pedal de acelerador con un umbral de hundimiento muy débil predeterminado y un circuito de puesta a cero una vez que la variable Reposo salida del resto del dispositivo de arranque del invento vuelve a «0»;
- un circuito para ensayar el valor de la estimación de par transmitido ECT salido del resto del dispositivo de arranque del invento a un valor de umbral ECTUmbral y para producir una orden de desaplicación del Freno de Aparcamiento Automático;
- una segunda puerta Y para combinar la orden de desaplicación «en llano» salida del circuito para ensayar el valor de la estimación de par transmitido ECT a la salida de la primera puerta Y y cuya salida está conectada al controlador del motor eléctrico del Freno de Aparcamiento Automático.
38. Un dispositivo según una de las reivindicaciones 23 a 37, caracterizado porque incluye un circuito para poner en práctica un servicio de arranque en bajada, con la primera marcha engranada que incluye:
- un circuito para activar el servicio de arranque «en bajada, con la primera marcha engranada» durante la configuración del vehículo en la producción, en el mantenimiento o durante la detección del tipo de conductor o del conductor cuando este último se sitúa en el vehículo que produce una señal lógica de «0» si el servicio no está implantado y de «1» si el servicio está implantado;
- un circuito de detección de situación «en bajada, con la primera marcha engranada» para detectar que la señal representativa del ángulo de inclinación producida por el captador de ángulo de pendiente 7 es inferior a un valor de umbral negativo registrado en un registro conveniente y representativo del límite de situación «en bajada, con la primera marcha engranada»;
- una tercera puerta Y para combinar las señales de salida del circuito para activar el servicio de arranque «en bajada, con la primera marcha engranada» y del circuito de detección de situación «en bajada, con la primera marcha engranada»;
- una cuarta puerta Y para combinar la salida de la tercera puerta Y y la salida del circuito para probar el valor de la estimación de par transmitido ECT salido del resto del dispositivo de arranque del invento con un valor de umbral ECTUmbral y para producir una orden de desaplicación del Freno de Aparcamiento Automático de situación «en bajada, con la primera marcha engranada».
39. Un dispositivo según una de las reivindicaciones 23 a 38, caracterizado porque incluye un circuito para poner en práctica un servicio de arranque en bajada, en «marcha atrás» que incluye:
- un circuito para activar el servicio de arranque «en bajada, con la marcha atrás engranada» durante la configuración del vehículo en la producción, en el mantenimiento o durante la detección del tipo de conductor o del conductor cuando este último se sitúa en el vehículo que produce una señal lógica de «0» si el servicio no está implantado y de «1» si el servicio está implantado;
- un circuito de detección de situación «en bajada, con la marcha atrás engranada» para detectar que la señal representativa del ángulo de inclinación producida por el captador de ángulo de pendiente 7 es superior a un valor de umbral positivo registrado en un registro conveniente y representativo del límite de situación «en bajada, con la marcha atrás engranada»;
- una tercera puerta Y para combinar las señales de salida del circuito para activar el servicio de arranque «en bajada, con la marcha atrás engranada» y del circuito de detección de situación «en bajada, con la marcha atrás engranada»;
- una cuarta puerta Y para combinar la salida de la tercera puerta Y y la salida del circuito para probar el valor de la estimación de par transmitido ECT resultante del resto del dispositivo de arranque del invento con un valor de umbral ECTUmbral y para producir una orden de desaplicación del Freno de Aparcamiento Automático de situación «en bajada, con la marcha atrás engranada».
40. Un dispositivo según una de las reivindicaciones 23 a 39, caracterizado porque incluye un circuito para detectar un exceso de cabeceo cuya salida es activa si el exceso de cabeceo sobrepasa un umbral predeterminado en un registro, siendo combinada la salida del circuito para detectar un exceso de cabeceo por una primera entrada inversora de una puerta Y, cuya otra entrada está conectada a la salida del dispositivo precedentemente descrito sobre la cual se encuentra la orden de desaplicación del Freno de Aparcamiento Automático, y produciendo la salida de la puerta Y la orden de desaplicación del Freno de Aparcamiento Automático al margen de un exceso de cabeceo.
41. Un dispositivo según la reivindicación 40, caracterizado porque el circuito para detectar un exceso de cabeceo incluye un terminal de entrada que recibe una señal producida por el captador de ángulo de pendiente (7) que presenta una resolución suficiente para detectar un exceso de cabeceo, transmitido a la entrada de un circuito para producir una señal representativa de la derivada temporal de la señal de detección del ángulo de inclinación cuya salida está conectada a una entrada de un comparador cuya otra entrada está conectada a un registro que mantiene un valor de umbral de exceso de cabeceo. La salida del comparador es activa cuando la derivada de la señal representativa del ángulo de inclinación del captador 7 es superior al umbral predeterminado.
42. Un dispositivo según la reivindicación 41, caracterizado porque incluye un generador de valores de umbral de exceso de cabeceo en función del ángulo de inclinación producido por el captador (7) para producir el valor de umbral de exceso de cabeceo.
43. Un dispositivo según la reivindicación 42, caracterizado porque el generador de valores de umbral de exceso de cabeceo incluye una primera serie de valores de umbral en un primer sentido de arranque y una segunda serie de valores de umbral en un segundo sentido de arranque.
44. Un dispositivo según una de las reivindicaciones 23 a 43, caracterizado porque incluye un circuito para aportar un servicio de anticipación de la dinámica del arranque que incluye un circuito para calcular la derivada temporal D_Acc de la señal Teta_Acc de grado de hundimiento proporcionada por el captador de ángulo de pendiente (7; Fig. 1) conectado a una primera entrada de un comparador cuya otra entrada está conectada a un generador de un valor predeterminado de un valor Umbral_Anticipo, de manera que su salida es activa si el valor Umbral_Anticipo es sobrepasado cuya señal de salida del comparador es entonces transmitida a una primera entrada de otra puerta Y cuya segunda entrada está conectada a un circuito para detectar que la estimación de par transmitido ECT está en curso de incremento por ejemplo detectando la evolución del contador CPTR (83, Fig. 6) y la salida de la otra puerta Y es entonces utilizada como orden de desaplicación anticipado del Freno de Aparcamiento Automático.
45. Un dispositivo según la reivindicación 44, caracterizado porque incluye también un generador de un umbral predeterminado Umbral_Anticipo en forma de una tabla de valores de umbral dirigida por el valor del grado de pendiente medido por el captador de ángulo de pendiente (7), siendo entonces el valor Umbral_Anticipo transmitido al comparador precitado.
46. Un dispositivo según una de las reivindicaciones 23 a 45, caracterizado porque incluye también un circuito para tener en cuenta el tiempo de respuesta del freno de Aparcamiento Automático y el dinamismo del conductor ejecutando una anticipación o predicción (ECT_predicho) sobre la estimación de par transmitido (ECT) que incluye:
- un operador de predicción para ejecutar una operación de la forma: ECT_predicho(Tr) = ECT + Tr x (d/dt).ECT, en la que Tr es un valor característico del tiempo de respuesta del sistema electromecánico y la derivada temporal ((d/dt).ECT) sobre la estimación de par transmitido es una estimación del dinamismo del conductor;
- un operador de ensayo de la predicción sobre la estimación de par transmitido (ECT_predicho) al menos a un umbral (S_min_predicho y/o S_max_predicho) de ensayo de desaplicación con anticipación predeterminada, registrado y/o que se puede calibrar en una memoria, de manera que sea producida una orden de desaplicación anticipada del Freno de Aparcamiento Automático si el operador de ensayo es activado.
47. Un dispositivo según una de las reivindicaciones 23 a 46, caracterizado porque incluye un procesador que presenta una arquitectura lógica en cuatro bloques:
- un bloque de toma de los datos de entrada entre los cuales el régimen motor Wm, la velocidad del vehículo Vv, el ángulo de pendiente, el par medio estimado Cme, el grado de hundimiento del pedal del acelerador TETA_Acc, en particular tomados sobre el bus CAN (1):
- un bloque de tratamiento de señal aplicado sobre los datos de entrada que opera particularmente filtrados numéricos sobre la totalidad o parte de los datos de entrada y realiza correcciones de escalas o de unidades;
- un bloque de inicialización de los parámetros del procedimiento del invento que incluye principalmente los valores de umbral y las inicializaciones de los contadores;
- un bloque de ejecución del procedimiento según una de las reivindicaciones 1 a 22 para generar una orden de desaplicación del Freno de Aparcamiento Automático.
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz: - una caja de engranajes (GR) que […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de transmisión automática y vehículo del tipo de montar a horcajadas equipado con el aparato, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un embrague incluyendo un rotador de lado […]