DISPOSITIVO PARA TRATAMIENTO Y/O MANIPULACION DE OBJETOS.
Dispositivo para el tratamiento y/o manejo de objetos (10), especialmente de moldes en la fabricación de artículos de chocolate,
mediante una garra de zapata (6), la cual está colocada en al menos tres brazos (3.1-3.5), cada uno de los cuales puede ser movido en dos piezas corredizas exteriores (2.1, 2.3) y en una pieza corrediza interior (2.2) a lo largo de al menos un raíl (1), en cuyo caso un brazo exterior (3.1) en la pieza corrediza exterior (2.1) cruza un brazo interior (3.2) en la pieza corrediza interior (2.2), caracterizado en que,
el brazo exterior (3.1) que cruza el brazo interior (3.2) forma una articulación común (7) con el otro brazo exterior (3.3) en la garra de zapata (6) o cruza del mismo modo el otro brazo exterior (3.3), el cual forma una articulación propia (29) con la garra de zapata (6) al otro lado de la articulación (7)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/007238.
Solicitante: KMB PRODUKTIONS AG.
Nacionalidad solicitante: Suiza.
Dirección: MARKSTEINSTRASSE 5,8552 FELBEN.
Inventor/es: KNOBEL,GUIDO.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Marzo de 2010.
Clasificación Internacional de Patentes:
- B65G47/90B
Clasificación PCT:
- B65G47/90 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
Fragmento de la descripción:
Dispositivo para tratamiento y/o manipulación de objetos.
El invento se refiere a un dispositivo para el tratamiento y/o manejo de objetos, especialmente de moldes en la fabricación de artículos de chocolate, mediante una garra de zapata colocada en al menos tres brazos, cada uno de los cuales puede ser movido en dos piezas corredizas exteriores y en una pieza corrediza interior a lo largo de al menos un raíl, en cuyo caso un brazo exterior en la pieza corrediza exterior cruza un brazo interior en la pieza corrediza interior.
Estado de la tecnología
Dispositivos de la manera anteriormente descrita son ya conocidos y están disponibles en el mercado en múltiples formas y ejecuciones. Habitualmente se les denomina "robot" y tienen la función, dentro de una empresa automatizada, de mover objetos de un sitio a cualquier otro sitio deseado. Únicamente se indica la DE 29920995 U1, en la cual se presenta un dispositivo para la manipulación de placas de circuito impresas. En este dispositivo, dentro de una carcasa base se encuentra un equipo de manejo con elementos de ventosas en una placa, en cuyo caso el equipo de manejo retira las placas de circuito impresas de un casete con una pared de colocación oblicua o las apila en un casete correspondiente. El equipo de manejo posee un cilindro hidráulico, del cual puede salir un vástago de émbolo, en el cual está colocada la placa con los elementos de ventosa. Este cilindro gira alrededor de un eje y la extracción y recolección se realizan mediante el movimiento del vástago de émbolo.
Algo parecido está demostrado también en la DE 29622286 U1, en la cual se reagrupan dentro de un dispositivo las placas de circuito impresas y las capas adhesivas ("Prepreg"). Esto ocurre mediante las correspondientes placas de ventosas, las cuales serán conducidas sobre raíles.
La patente de estados unidos 6557235 B1 describe un robot lineal, que se utiliza para funciones de tratamientos o de manejo. El dispositivo consiste de un armazón de máquina, una plataforma móvil y dos guías lineales. A través de los elementos de unión la plataforma móvil está unida con las guías lineales, en cuyo caso dos elementos de unión están unidos con la plataforma a través de la misma articulación. Las garras de zapata o las herramientas pueden estar colocadas en la plataforma móvil.
De la WO 99/08832 A1 se conoce además un dispositivo para el movimiento y posicionamiento de un objeto en un nivel. En un ejemplo de ejecución el objeto está unido a través de tres brazos en cada caso con una pieza corrediza. En este caso los brazos de dos piezas corredizas adyacentes forman una articulación conjunta, o también cada uno de manera independiente, con el objeto. En otro ejemplo de ejecución del invento está previsto entonces que un brazo interior cruce con un brazo exterior, en cuyo caso los dos brazos exteriores forman una articulación conjunta en la herramienta.
Algo similar está representado también en la WO99/32256 A1, en cuyo caso, sin embargo, el brazo exterior cruza al brazo interior.
El presente invento se refiere ante todo al traslado de objetos del ámbito de la alimentación, y en este caso y especialmente a la fabricación de artículos de confitería, como por ejemplo bombones o artículos similares. Estos productos de confitería se fabrican habitualmente en un molde de múltiples cavidades, el cual es desplazado hacia otra estación de tratamiento para que se pueda endurecer. Esto se lleva a cabo hasta hoy en día por medio de robots, habituales en el mercado, los cuales trabajan con hidráulica o neumática. Estos robots se enfrentan a reparaciones, especialmente de carácter higiénico. Además, la velocidad de robots hidráulicos de este tipo deja mucho que desear así como su exactitud, con lo cual la acción de asignar por ejemplo los moldes de múltiples cavidades a las toberas de extracción puede ser alcanzada únicamente con dificultad cuando se utilizan robots hidráulicos o neumáticos.
Objetivo
El presente invento tiene como objetivo desarrollar un dispositivo de la manera anteriormente mencionada que sea de bajo coste, fácil de fabricar pero que trabaje sin embargo de forma extremadamente exacta.
Consecución del objetivo
Para la consecución de dicho objetivo es necesario que el brazo exterior que cruza el brazo interior forme una articulación conjunta con el otro brazo exterior en la garra de zapata, o que cruce igualmente el otro brazo exterior, y que forme una articulación propia con la garra de zapata por el otro lado de la articulación.
Una colocación de este tipo da a la guía de la garra de zapata una estabilidad considerable, de tal modo que la exactitud de la guía será sustancialmente mejorada. Además, de este modo será posible que la garra de zapata pueda ser levantada o bajada pero que además pueda ser también girada. De esta manera la garra de zapata podría ser utilizada de forma mucho más diversa.
Tanto en el primero como en el segundo ejemplo de ejecución puede resultar aconsejable que haya dos brazos formando un paralelogramo, esto quiere decir que estén colocados en el mismo lado de forma desplazada con respecto a la garra de zapata. El tercer brazo en el otro lado de la garra de zapata cruzaría el paralelogramo, o al menos un brazo de éste. De este modo se mantiene el ancho del dispositivo completo tan reducido como puede ser posible.
En el caso de otro ejemplo de ejecución del invento, sin embargo, los brazos no forman ningún paralelogramo, sino que los brazos pueden ser desplazados a voluntad en un raíl o en varios raíles. De este modo, con la garra de zapata se puede realizar cualquier movimiento alrededor de una articulación, por ejemplo se puede llevar a cabo hasta un giro de 360º.
En otro ejemplo de ejecución dos brazos están realizados con un tamaño reducido, en cuyo caso una sección de brazo reducido pertenece a un paralelogramo con un brazo más largo. Los dos secciones de brazo cortos están unidas en sus extremos libres con una articulación media, a la cual conectan también dos brazaletes fijos, unidos con la garra de zapata. También con una disposición de brazos tan articulada se pueden realizar determinados movimientos de la garra de zapata.
La presentación de ejemplos de ejecución puede prolongarse a voluntad. Otros ejemplos de ejecución están incluidos en el marco del invento.
Además, también es posible que se coloque encima de la garra de zapata una embocadura con superficies de traslado que están colocadas de forma oblicua con respecto a la superficie de la garra de zapata, por lo cual es posible atender también exigencias especiales para el movimiento de la garra de zapata.
Igualmente, con el fin de facilitar el movimiento tridimensional en el espacio, se puede asignar otro raíl al raíl anteriormente mencionado, en cuyo caso un propulsor lineal se encuentra preferiblemente también entre el primer raíl y el segundo raíl. El segundo raíl debe transcurrir en dirección oblicua con respecto al primer raíl o incluso formar con éste un ángulo recto.
Además, está previsto que haya un propulsor lineal entre la pieza corrediza y el raíl.
Con el término "propulsor lineal" o "motor lineal" se entiende una máquina propulsora eléctrica. Al contrario de lo que ocurre con las ampliamente utilizadas máquinas rotatorias, un motor lineal no causa el movimiento giratorio de los objetos conectados con él sino que dicho movimiento será en una dirección lineal (movimiento de traslación). Una posibilidad de construir un motor lineal consiste en la ejecución de un motor paso a paso de rotación en el plano. Por ejemplo, un motor lineal de este tipo está demostrado en la DE 10 2005047819 A1, la cual se toma como referencia, de modo que ya no se sigue aquí con la descripción del motor lineal.
Esto significa para el presente caso que entre el raíl y la pieza corrediza está colocado el propulsor lineal. Por ejemplo, sobre el raíl pueden estar colocadas cintas de imán permanente correspondientes como parte de un estator, en cuyo caso dichas cintas de imán permanentes se alternan con respecto a su polaridad. La parte móvil del motor lineal está separada mediante un entrehierro, en cuyo caso dicha parte móvil presenta un bobinado correspondiente, el cual puede ser excitado con el fin de poner en marcha el propulsor lineal. Naturalmente, esta distribución también puede ser a la inversa.
Los motores lineales poseen grandes ventajas. Por un lado trabajan sin caja de cambios, lo que favorece sustancialmente su manejo...
Reivindicaciones:
1. Dispositivo para el tratamiento y/o manejo de objetos (10), especialmente de moldes en la fabricación de artículos de chocolate, mediante una garra de zapata (6), la cual está colocada en al menos tres brazos (3.1-3.5), cada uno de los cuales puede ser movido en dos piezas corredizas exteriores (2.1, 2.3) y en una pieza corrediza interior (2.2) a lo largo de al menos un raíl (1), en cuyo caso un brazo exterior (3.1) en la pieza corrediza exterior (2.1) cruza un brazo interior (3.2) en la pieza corrediza interior (2.2), caracterizado en que,
el brazo exterior (3.1) que cruza el brazo interior (3.2) forma una articulación común (7) con el otro brazo exterior (3.3) en la garra de zapata (6) o cruza del mismo modo el otro brazo exterior (3.3), el cual forma una articulación propia (29) con la garra de zapata (6) al otro lado de la articulación (7).
2. Dispositivo conforme a la reivindicación 1, caracterizado en que el brazo interior y el exterior (3.2, 3.3) forman un paralelogramo, el cual es cruzado por el brazo exterior (3.1).
3. Dispositivo conforme a la reivindicación 1 ó 2, caracterizado en que al menos un brazo exterior y un brazo interior (3.4, 3.5) entran en una unión articulada (13) entre las piezas corredizas (2.1, 2.2) y la garra de zapata (6).
4. Dispositivo conforme a la reivindicación 3, caracterizado en que los dos brazos (3.4, 3.5) están conectados por medio de una articulación central (13) a dos brazaletes (14.1, 14.2), los cuales están acoplados de forma independiente en el otro extremo con la garra de zapata (6).
5. Dispositivo conforme con al menos una de las reivindicaciones 1 a 4, caracterizado en que al menos dos piezas corredizas (2.1-2.3) pueden ser desplazadas a lo largo del mismo raíl (1).
6. Dispositivo conforme con al menos una de las reivindicaciones 1 a 5, caracterizado en que sobre la garra de zapata (6) se encuentra una embocadura (16) con una superficie de intercambio (17) situada de forma oblicua con respecto a la superficie de la garra de zapata (8).
7. Dispositivo conforme con al menos una de las reivindicaciones 1 a 6, caracterizado en que entre las piezas corredizas (2.1-2.4) y la garra de zapata (6) está previsto un acumulador de fuerza (30).
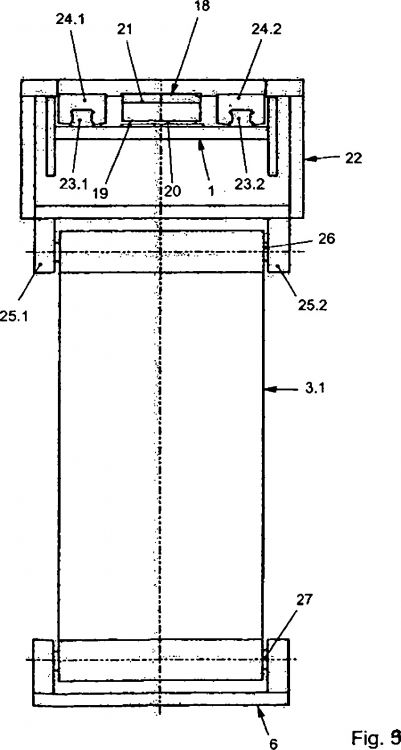
8. Dispositivo conforme con al menos una de las reivindicaciones 1 á 7, caracterizado en que un propulsor linear (18) está colocado entre las piezas corredizas (2.1-2.4) y el raíl (1).
9. Dispositivo conforme a la reivindicación 8, caracterizado en que el propulsor lineal (18) se encuentra sobre el raíl (1).
10. Dispositivo conforme a la reivindicación 8 ó 9, caracterizado en que las piezas corredizas (2.1-2.3) abrazan el raíl (1) con una carcasa de caja (22).
11. Dispositivo conforme con al menos una de las reivindicaciones 8 a 10, caracterizado en que el raíl (1) está realizado en su forma longitudinal como una I acostada.
12. Dispositivo conforme con al menos una de las reivindicaciones 8 a 11, caracterizado en que las piezas corredizas (2.1-2.3) se apoyan sobre los raíles de guía (23.1, 23.2) por ambos lados del propulsor lineal (18).
13. Dispositivo conforme con al menos una de las reivindicaciones 8 a 12, caracterizado en que una tira de imán permanente (19) está colocada sobre el raíl (1) como parte de un estator y que en las piezas corredizas (2.1-2.3) están colocados linealmente unos embobinados (21), en cuyo caso existe un entrehierro (20) entre las tiras de imán permanentes y los embobinados.
14. Dispositivo conforme con al menos una de las reivindicaciones 8 a 13, caracterizado en que al propulsor lineal (18) está asignado un segundo propulsor lineal (28) que transcurre en dirección oblicua al primero.
15. Utilización de un dispositivo conforme con al menos una de las reivindicaciones 1 a 14 para el tratamiento y/o manejo de moldes en la fabricación de artículos de chocolate.
Patentes similares o relacionadas:
DISPOSITIVO DE TRANSFERENCIA E INSTALACIÓN DE TIPO LINEAL PARA LA FABRICACIÓN DE RECIPIENTES, del 5 de Diciembre de 2011, de SIDEL PARTICIPATIONS: Dispositivo de transferencia (50, 50') de una preforma , o de un recipiente , que comprende al menos una pinza (54, 54') que está constituida por dos […]
 PROCEDIMIENTO DE COMBUSTIÓN DE MINERALES GRANULADOS, del 3 de Marzo de 2011, de MAERZ OFENBAU AG: Procedimiento para quemar producto de combustión mineral granulado, particularmente de piedra caliza o dolomita, en un horno de pozos , el […]
PROCEDIMIENTO DE COMBUSTIÓN DE MINERALES GRANULADOS, del 3 de Marzo de 2011, de MAERZ OFENBAU AG: Procedimiento para quemar producto de combustión mineral granulado, particularmente de piedra caliza o dolomita, en un horno de pozos , el […]
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Mecanismo de suministro de boquilla de vertido y máquina de sellado de boquilla de vertido, del 12 de Febrero de 2020, de TOYO JIDOKI CO., LTD.: Un mecanismo de suministro de boquilla de vertido que comprende: un dispositivo de retención de boquilla de vertido para retener […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Sistemas y métodos de transportador mecánico y envasado de alimentos, del 8 de Enero de 2020, de INTERCONTINENTAL GREAT BRANDS LLC: Un aparato de envasado de productos alimenticios que comprende: un transportador mecánico corriente arriba que transporta artículos […]
Dispositivo y método para transferir envases, del 23 de Octubre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Dispositivo de transferencia para transferir envases de un dispositivo de avance de envases, en el que están alineados en al […]