SISTEMA DE GESTION DEL ESTADO Y DEL FUNCIONAMIENTO DE UN VEHICULO AUTOMOVIL.
Un sistema de gestión del estado y del funcionamiento de un vehículo automóvil dotado de un dispositivo de frenado dinámico (6) y de un dispositivo de frenado estático (7),
que comprende un cierto número de captadores (C1, ..., Cn) instalados a bordo del vehículo, tales como un captador de deceleración longitudinal del vehículo, al menos un captador de la velocidad de rotación de una de las ruedas del vehículo, un captador de oscilación o sacudida de las ruedas del vehículo con respecto al chasis o habitáculo de éste, y un captador de presión del cilindro maestro, un dispositivo de mando o gobierno (15) que recibe informaciones de los diferentes captadores y que es apto para determinar, a partir de estas informaciones y, llegado el caso, de las representativas de los estados de los pedales de freno y de aceleración (2) del vehículo, el estado del vehículo y calcular órdenes o instrucciones de frenado transmitidas a los dispositivos de frenado dinámico (6) y estático (7), que permiten, en particular, mantener el vehículo inmovilizado desde que su velocidad es nula, arrancar el vehículo tras una detención de éste, provocar una deceleración controlada del vehículo o garantizar una seguridad de frenado del vehículo con la detención de éste, de tal forma que dicho sistema de caracteriza por que el dispositivo de gobierno (15) es capaz de inmovilizar el vehículo desde que su velocidad es nula frenando éste último por el accionamiento simultáneo de su dispositivo de frenado dinámico (6) y de su dispositivo de frenado estático (7), cuando el vehículo se encuentra en una pendiente relativamente fuerte, por ejemplo, de al menos el 20%
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2004/000278.
Solicitante: PEUGEOT CITROEN AUTOMOBILES SA.
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY,78943 VELIZY-VILLACOUBLAY CEDE.
Inventor/es: ABADIE, VINCENT, BAILLEUX, FRANCOIS, HERNETTE,VINCENT.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- B60T13/74C
- B60T7/10F
- B60T7/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 7/00 Organos de iniciación de la acción de los frenos. › por desencadenamiento automático; por desencadenamiento no sometido a la voluntad del conductor o del pasajero.
Clasificación PCT:
- B60T13/66 B60T […] › B60T 13/00 Transmisión de la acción de frenado entre el órgano de iniciación y los órganos terminales de acción, con potencia de frenado asistida o con relé de potencia; Sistemas de frenos que incluyen esos medios de transmisión, p. ej. sistemas de frenado de presión de aire. › Control eléctrico de los sistemas de frenos de fluido bajo presión.
- B60T13/74 B60T 13/00 […] › con accionamiento o asistencia eléctrica.
- B60T7/10 B60T 7/00 […] › Disposición del mango de control.
- B60T7/12 B60T 7/00 […] › por desencadenamiento automático; por desencadenamiento no sometido a la voluntad del conductor o del pasajero.
Clasificación antigua:
- B60T13/66 B60T 13/00 […] › Control eléctrico de los sistemas de frenos de fluido bajo presión.
- B60T13/74 B60T 13/00 […] › con accionamiento o asistencia eléctrica.
- B60T7/10 B60T 7/00 […] › Disposición del mango de control.
- B60T7/12 B60T 7/00 […] › por desencadenamiento automático; por desencadenamiento no sometido a la voluntad del conductor o del pasajero.
Fragmento de la descripción:
Sistema de gestión del estado y del funcionamiento de un vehículo automóvil.
La presente invención se refiere a un sistema de gestión del estado y del funcionamiento de un vehículo automóvil.
Se refiere, más particularmente, a un sistema de gestión del mantenimiento, en el estado inmovilizado, de un vehículo automóvil cuando su velocidad decrece hasta la detención del vehículo, el cual está dotado de un dispositivo de frenado dinámico y de un dispositivo de frenado estático.
Asistimos en la actualidad a una creciente automatización de los vehículos automóviles al objeto de aumentar la seguridad y el confort de estos vehículos.
Sin embargo, esta automatización se ve limitada por razones de peso, de coste y/o de dificultades de implantación.
Esto así, por ejemplo, para un vehículo automóvil de acuerdo con el cual la deceleración del vehículo es asegurada por el dispositivo de frenado estático que comprende, generalmente, una moto-reductora eléctrica que arrastra al menos un cable de accionamiento de un freno de estacionamiento, que actúa sobre las ruedas traseras del vehículo, y un dispositivo antibloqueo de las ruedas que permite dosificar los esfuerzos ejercidos en el cable de accionamiento del freno de estacionamiento, al tiempo que vigila la velocidad de las ruedas. Semejante arquitectura o estructura conocida resulta onerosa por el hecho de que es necesario prever un dispositivo de frenado estático que debe tener una buena dinámica, es decir, una potencia motriz capaz de generar los esfuerzos de frenado en el cable o en los cables de accionamiento en un tiempo muy corto, por ejemplo, de menos de 500 milisegundos.
Se conoce, en particular, por el documento DE 10038786 un sistema que comprende un cierto número de captadores incorporados o embarcados en el vehículo, tales como, por ejemplo, un captador de deceleración longitudinal del vehículo, al menos un captador de la velocidad de rotación de una de las ruedas del vehículo, un captador de oscilación o sacudida de las ruedas del vehículo con respecto al chasis o habitáculo de éste, y un captador de presión del cilindro maestro, un dispositivo de mando o gobierno que recibe informaciones de los diferentes captadores y que es apto para determinar, a partir de estas informaciones y, llegado el caso, de las representativas de los estados de los pedales de freno y de aceleración del vehículo, el estado del vehículo y calcular órdenes o instrucciones de frenado transmitidas a los dispositivos de frenado dinámico y estático, que permiten, en particular, mantener el vehículo inmovilizado desde que su velocidad es nula, arrancar el vehículo tras una detención de éste, provocar una deceleración controlada del vehículo o garantizar una seguridad de frenado del vehículo con la detención de éste.
La presente invención tiene como propósito eliminar los inconvenientes anteriores de los sistemas conocidos.
A este efecto, la invención propone un sistema de gestión del estado y del funcionamiento de un vehículo automóvil dotado de un dispositivo de frenado dinámico y de un dispositivo de frenado estático, de acuerdo con la reivindicación 1.
Además, el dispositivo de gobierno es apto para inmovilizar el vehículo desde que su velocidad es nula, al frenar éste último por accionamiento de su dispositivo de frenado estático cuando el vehículo se encuentra en una pendiente relativamente débil, por ejemplo, inferior al 3%.
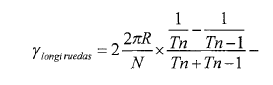
El dispositivo de gobierno permite determinar la pendiente sobre la que se desplaza el vehículo calculando la diferencia entre el valor de deceleración longitudinal del vehículo, suministrado por el captador de deceleración longitudinal, y el valor de deceleración longitudinal calculado a partir del captador de velocidad de rotación de una rueda del vehículo, con el fin de determinar un valor de discrepancia de deceleración longitudinal ?longipendiente y calculando la pendiente de acuerdo con la fórmula:
El dispositivo de gobierno permite analizar la evolución de la pendiente calculada con el fin de verificar su coherencia con la distancia recorrida por el vehículo, al objeto de no tener en cuenta para la inmovilización del vehículo una distancia pequeña recorrida por éste para una desviación de distancia calculada, utilizando la fórmula siguiente:
donde
a es la batalla o distancia entre ejes del vehículo, y
b es la distancia recorrida por el vehículo.

Este dispositivo de gobierno calcula una corrección del valor de la deceleración longitudinal suministrado por el captador correspondiente, a parir de los captadores de oscilación o sacudida de las ruedas delanteras y traseras, con respecto al habitáculo del vehículo, de acuerdo con la fórmula:

donde
Zav es la oscilación de las ruedas delanteras,
Zar es la oscilación de las ruedas traseras, y
a es la distancia entre ejes del vehículo.
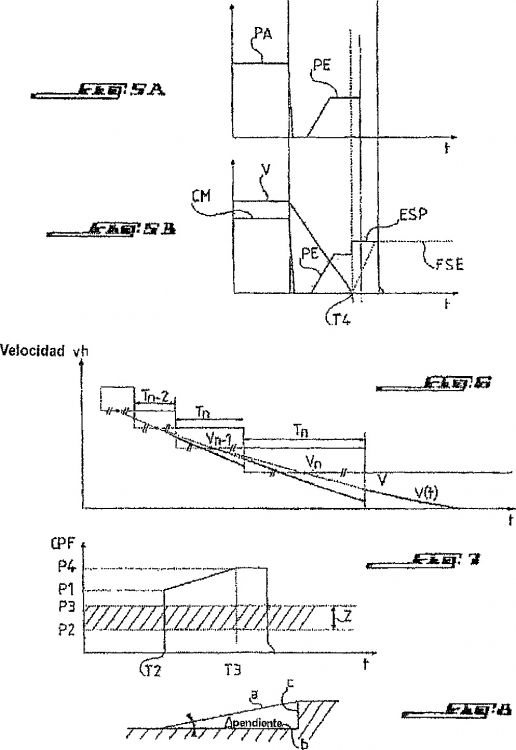
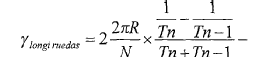
El dispositivo de gobierno está adaptado para calcular una instrucción de presión de frenado optimizada, que se aplica al dispositivo de frenado dinámico en función de la pendiente por la que se desplaza el vehículo, y de una estimación de la eficacia del frenado global del vehículo determinada por la deceleración longitudinal del vehículo por efecto de una presión de frenado dada que resulta del hundimiento del pedal de freno por parte del conductor del vehículo a la hora de realizar las operaciones de frenado de éste último.
El dispositivo de mando o gobierno optimiza la instrucción de presión de frenado en un valor justo y necesario para mantener el vehículo en detención, aumentado por un factor multiplicativo de seguridad, de tal manera que la presión de frenado aplicada al dispositivo de frenado dinámico se encuentre por debajo de la zona de ruidos de frenado.
El dispositivo de frenado dinámico es activado por el dispositivo de gobierno de tal manera que se aplique la instrucción de frenado a las cuatro ruedas del vehículo y, cuando el dispositivo de frenado dinámico es desactivado, la presión de frenado cae bruscamente por debajo de la zona de ruidos, para disminuir a continuación más lentamente hasta un valor nulo.
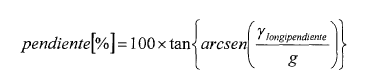
Cuando se produce una deceleración del vehículo, el dispositivo de gobierno calcula un valor de deceleración a partir de cada uno de los captadores de velocidad de las ruedas del vehículo, según la fórmula:
donde
R es el radio de rodadura de la rueda,
N es el número de topes por vuelta del captador, y
Tn, Tn-1 son los periodos respectivamente presente y pasado de la señal cuadrada suministrada por el captador, inversamente proporcionales a la velocidad de rotación de la rueda,
de tal manera que el dispositivo de gobierno deduce una media de los cuatro valores calculados de deceleración longitudinal para las cuatro ruedas y calcula la velocidad del vehículo a partir de cada valor calculado de deceleración, de acuerdo con la fórmula:

donde t es el tiempo transcurrido desde el último frente de subida de la señal cuadrada del captador,
y el dispositivo de gobierno realiza una media de los cuatro valores calculados de velocidad del vehículo.
El dispositivo de frenado estático comprende una moto-reductora eléctrica que arrastra al menos un cable de accionamiento de un freno de estacionamiento, que actúa sobre las ruedas traseras del vehículo, y el dispositivo de gobierno calcula el esfuerzo de apriete en el cable, al determinar el par de salida del motor eléctrico a partir de la intensidad de corriente eléctrica del motor y del rendimiento de la reductora de éste último.
El dispositivo de gobierno acciona el dispositivo de frenado estático cuando el conductor acciona el botón de mando de éste último y el conductor...
Reivindicaciones:
1. Un sistema de gestión del estado y del funcionamiento de un vehículo automóvil dotado de un dispositivo de frenado dinámico (6) y de un dispositivo de frenado estático (7), que comprende un cierto número de captadores (C1, ..., Cn) instalados a bordo del vehículo, tales como un captador de deceleración longitudinal del vehículo, al menos un captador de la velocidad de rotación de una de las ruedas del vehículo, un captador de oscilación o sacudida de las ruedas del vehículo con respecto al chasis o habitáculo de éste, y un captador de presión del cilindro maestro, un dispositivo de mando o gobierno (15) que recibe informaciones de los diferentes captadores y que es apto para determinar, a partir de estas informaciones y, llegado el caso, de las representativas de los estados de los pedales de freno y de aceleración (2) del vehículo, el estado del vehículo y calcular órdenes o instrucciones de frenado transmitidas a los dispositivos de frenado dinámico (6) y estático (7), que permiten, en particular, mantener el vehículo inmovilizado desde que su velocidad es nula, arrancar el vehículo tras una detención de éste, provocar una deceleración controlada del vehículo o garantizar una seguridad de frenado del vehículo con la detención de éste, de tal forma que dicho sistema de caracteriza por que el dispositivo de gobierno (15) es capaz de inmovilizar el vehículo desde que su velocidad es nula frenando éste último por el accionamiento simultáneo de su dispositivo de frenado dinámico (6) y de su dispositivo de frenado estático (7), cuando el vehículo se encuentra en una pendiente relativamente fuerte, por ejemplo, de al menos el 20%.
2. Un sistema de acuerdo con la reivindicación 1, caracterizado por el hecho de que el dispositivo de gobierno (15) es capaz de inmovilizar el vehículo desde que su velocidad es nula frenando éste último por el accionamiento de su dispositivo de frenado estático cuando el vehículo se encuentra en una pendiente relativamente débil, por ejemplo, inferior al 3%.
3. Un sistema de acuerdo con una de las reivindicaciones precedentes, caracterizado por el hecho de que el dispositivo de gobierno (15) permite determinar la pendiente sobre la que se desplaza el vehículo calculando la diferencia entre el valor de deceleración longitudinal del vehículo suministrado por el captador de deceleración longitudinal, y el valor de deceleración longitudinal calculado a partir del captador de velocidad de rotación de una rueda del vehículo, a fin de determinar un valor de discrepancia de deceleración longitudinal ?longipendiente, y calculando la pendiente de acuerdo con la fórmula:

4. Un sistema de acuerdo con la reivindicación 3, caracterizado por que el dispositivo de gobierno (15) permite analizar la evolución de la pendiente calculada, con el fin de verificar su coherencia con la distancia recorrida por el vehículo, al objeto de no tener en cuenta para la inmovilización del vehículo una distancia pequeña recorrida por éste para una desviación de pendiente calculada, utilizando la siguiente fórmula:

donde
a es la batalla o distancia entre ejes del vehículo, y
b es la distancia recorrida por el vehículo.
5. Un sistema de acuerdo con la reivindicación 3 ó la reivindicación 4, caracterizado por que el dispositivo de gobierno (15) calcula una corrección del valor de deceleración longitudinal suministrado por el captador correspondiente, a partir de los captadores de oscilación de las ruedas delanteras y traseras, con respecto a la caja o habitáculo del vehículo, de acuerdo con la fórmula:

donde
Zav es la oscilación de las ruedas delanteras,
Zar es la oscilación de las ruedas traseras, y
a es la distancia entre ejes del vehículo.
6. Un sistema de acuerdo con una de las reivindicaciones precedentes, caracterizado por que el dispositivo de gobierno (15) calcula una orden o instrucción de presión de frenado optimizada, que se aplica al dispositivo de frenado dinámico, en función de la pendiente por la que se desplaza el vehículo y de una estimación de la eficacia del frenado global del vehículo, determinada por la deceleración longitudinal del vehículo por una presión de frenado dada, resultante del hundimiento del pedal de freno por parte del conductor del vehículo cuando se realizan las operaciones de frenado de éste último.
7. Un sistema de acuerdo con la reivindicación 6, caracterizado por que el dispositivo de gobierno (15) optimiza la instrucción de presión de frenado en un valor justo y necesario para mantener el vehículo detenido, aumentado por un factor multiplicativo de seguridad, de tal manera que la presión de frenado aplicada al dispositivo de frenado dinámico (6) se encuentre por encima de la zona (Z) de ruidos de frenado.
8. Un sistema de acuerdo con la reivindicación 7, caracterizado por que el dispositivo de frenado dinámico (6) es activado por el dispositivo de gobierno (6) de tal modo que aplica la instrucción de frenado a las cuatro ruedas del vehículo, y, cuando el dispositivo de frenado dinámico (6) es desactivado, la presión de frenado cae bruscamente por debajo de la zona de ruidos, para disminuir a continuación más lentamente hasta un valor nulo.
9. Un sistema de acuerdo con una de las reivindicaciones precedentes, caracterizado por que, cuando se produce una deceleración del vehículo, el dispositivo de gobierno (15) calcula un valor de deceleración a partir de cada uno de los captadores de velocidad de las ruedas del vehículo, de acuerdo con la fórmula:
donde
R: radio de rodadura de la rueda,
N: número de topes por vuelta del captador,
Tn, Tn-1: periodos presente y pasado de la señal cuadrada suministrada por el captador, inversamente proporcionales a la velocidad de rotación de la rueda,
de tal manera que el dispositivo de gobierno deduce una media de los cuatro valores calculados de deceleraciones longitudinales para las cuatro ruedas y calcula la velocidad del vehículo a partir de cada valor calculado de deceleración, de acuerdo con la fórmula:

donde t: tiempo transcurrido desde el último frente de subida de la señal cuadrada del captador,
y el dispositivo de gobierno realiza una media de los cuatro valores calculados de velocidad del vehículo.
10. Un sistema de acuerdo con una de las reivindicaciones precedentes, caracterizado por que el dispositivo de frenado estático (7) comprende una moto-reductora eléctrica (11) que arrastra al menos un cable (12) de accionamiento de un freno de estacionamiento que actúa sobre las ruedas traseras del vehículo, y por que el dispositivo de gobierno (15) calcula el esfuerzo de apriete en el cable (12) mediante la determinación del par de salida del motor eléctrico a partir de la intensidad de corriente eléctrica del motor y del rendimiento de la reductora de éste último.
11. Un sistema de acuerdo con una de las reivindicaciones precedentes, caracterizado por que el dispositivo de gobierno (15) acciona el dispositivo de frenado estático (7) cuando el conductor acciona el botón de mando de éste último, y por que el conductor aprieta simultáneamente el pedal de freno para garantizar un modo seguro cuando el dispositivo de frenado dinámico (6) se encuentra fuera de servicio.
12. Un sistema de acuerdo con una de las reivindicaciones precedentes, caracterizado por que el dispositivo de gobierno (15) mantiene activado el dispositivo de frenado dinámico (6) y/o estático (7) si el conductor lleva la palanca selectora de la caja de velocidades a su posición de punto muerto o neutro con la detención del vehículo, y el dispositivo de gobierno (15) no activa ninguno de los dispositivos de frenado dinámico (6) ni estático (7) si el vehículo se detiene en posición de punto muerto o neutro de esta palanca.
13. Un sistema de acuerdo con una de las reivindicaciones precedentes, caracterizado por que el dispositivo de gobierno (15) aplica al dispositivo de frenado dinámico (6) y/o al dispositivo de frenado estático (7) una orden o instrucción de presión de frenado más importante en el caso de sobrecarga del vehículo señalizada al dispositivo de gobierno (15) por una acción manual del conductor, tal como una presión durante un tiempo determinado sobre un botón de mando del dispositivo de frenado estático (7).
Patentes similares o relacionadas:
Sistema y método para evitar la pérdida de mercancías de un vehículo, en particular para el transporte de mercancías, del 19 de Febrero de 2020, de IVECO MAGIRUS AG: Método de prevención de la pérdida de mercancías, en particular de un vehículo para el transporte de mercancías o transporte de mercancías y pasajeros, […]
Disposición de frenado de un vehículo, del 24 de Julio de 2019, de Siemens Mobility GmbH: Disposición de frenado para un vehículo con: - al menos dos dispositivos electroneumáticos de válvula direccional en respectivamente un primer y […]
SISTEMA ELECTRÓNICO EMBEBIDO PARA LA DETECCIÓN DE INTENCIÓN DE FRENADO DE UN CONDUCTOR EN SITUACIONES DE EMERGENCIA, del 20 de Junio de 2019, de INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY: La invención se refiere a un sistema electrónico embebido para la detección de intención de frenado de un conductor en situaciones de emergencia, utilizando […]
Sistema de control de la contaminación para un motor de combustión interna, del 9 de Abril de 2019, de Monros, Serge V: Un sistema de control de la contaminación para un motor de combustión interna, que comprende: un microcontrolador eléctricamente conectado a una toma […]
Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco y dispositivo de control con esta finalidad, del 13 de Diciembre de 2017, de WABCO GMBH: Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco del vehículo sobre su eje longitudinal, registrando un dispositivo […]
Dispositivo de desconexión automática del circuito electrónico de vehículos para su inmovilización programable ante impactos, del 7 de Septiembre de 2017, de SOTO ESCUDERO, PAULINO EMILIO: 1. Dispositivo de desconexión automática del circuito electrónico de vehículos para su inmovilización programable ante impactos caracterizado porque la pieza principal […]
Procedimiento para adaptar al menos un parámetro en un sistema controlado o regulado de un vehículo, del 6 de Septiembre de 2017, de KNORR-BREMSE SYSTEME FUR SCHIENENFAHRZEUGE GMBH: Procedimiento para adaptar al menos un parámetro en un sistema controlado o regulado de un vehículo sobre raíles en donde al menos a algunas de las posibles posiciones del vehículo […]
Dispositivo de control para un sistema de frenado de un vehículo, sistema de frenado para un vehículo y método para operar un sistema de frenado de un vehículo, del 9 de Agosto de 2017, de ROBERT BOSCH GMBH: 1. Dispositivo de control para un sistema de frenado de un vehículo, con un aparato de control , mediante el cual el sistema de […]