DISPOSITIVO Y PROCEDIMIENTO PARA RECONOCER EL TRAZADO DEL CONTORNO DE UN OBSTACULO.
Dispositivo (100) para un vehículo (30) destinado a reconocer el trazado del contorno de un obstáculo (20-1,
20-2) en los alrededores del vehículo (30) cuando este vehículo con el dispositivo pasa por delante del obstáculo (20- 1, 20-2), que comprende: al menos un equipo de emisión (110) configurado como un sensor de ultrasonidos para emitir una señal de emisión hacia el obstáculo (20-1, 20-2); al menos un equipo de recepción (120) para recibir al menos una señal de reflexión n, donde n = 1-N, por cada señal de emisión emitida, representando la señal de reflexión a la señal de emisión después de su reflexión en el obstáculo (20-1, 20-2); y un equipo de evaluación (130) para evaluar la señal de reflexión con respecto al trazado del contorno del obstáculo (20-1, 20-2); estando el equipo de evaluación (130) concebido para determinar la longitud (L) de un hueco de aparcamiento que está formado por dos obstáculos (20-1, 20-2) posicionados a cierta distancia uno de otro, especialmente por dos vehículos aparcados, cuando el vehículo (30) pasa por delante de ellos, a cuyo fin dicho equipo de evaluación capta la limitación (B1) - delantera en la dirección de marcha (FR) - del primer obstáculo (20-1) y la limitación trasera (B2) del segundo obstáculo (20-2) y establece la longitud (L) del hueco de aparcamiento como la distancia entre las dos limitaciones (B1, B2) en forma del camino recorrido por el vehículo circulante (30) entre las dos limitaciones, y estando concebido el equipo de recepción (120) para recibir la primera señal de reflexión (n=1); y el equipo de evaluación (130) está concebido para evaluar la primera señal de reflexión recibida (n=1) con respecto al trazado del contorno del obstáculo en sentido paralelo a la dirección de marcha (FR) del vehículo (30), caracterizado por el hecho de que el equipo de recepción (120) recibe como señal de reflexión al menos una señal de reflexión de orden superior (n > 2) que no es la primera (n=1) señal de reflexión recibida en el tiempo asociada a la señal de emisión; y el equipo de evaluación (130) está concebido para determinar una limitación (B1, B2) del contorno del obstáculo en la dirección de marcha (FR) no sobre la base de la señal de reflexión n=1 primeramente recibida, sino por evaluación de la al menos una señal de reflexión de orden superior (n > 2) y realizar el cálculo de la posición de la limitación del obstáculo (20-1, 20-2) por evaluación de la al menos una señal de reflexión de orden superior (n > 2)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04013376.
Solicitante: VALEO SCHALTER UND SENSOREN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LAIERNSTRASSE 12,74321 BIETIGHEIM-BISSINGEN.
Inventor/es: GOTZIG, HEINRICH, DR., JECKER,NICOLAS, ECKSTEIN,OLIVER.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Junio de 2004.
Fecha Concesión Europea: 28 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01S7/41 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
Clasificación PCT:
- G01S13/93 G01S […] › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G01S15/93 G01S […] › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › como anti-colisión.
- G01S7/41 G01S 7/00 […] › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo y procedimiento para reconocer el trazado del contorno de un obstáculo.
La invención se refiere a un dispositivo para un vehículo destinado a reconocer el trazado del contorno de un obstáculo en los alrededores del vehículo cuando este vehículo pasa por delante del obstáculo. Además, la invención se refiere a un procedimiento que sirve también para reconocer el trazado del contorno de un obstáculo, así como a un programa de ordenador para la puesta en práctica de este procedimiento.
Se conoce por los documentos EP-A-1 267 177 y EP 1 267 178 A1 un procedimiento y un dispositivo, respectivamente, para localizar objetos en el espacio, en los que se emiten rayos láser en impulsos y se reciben los impulsos de los rayos reflejados por los objetos. Se evalúan entonces ecos de recepción incidentes sucesivamente en el tiempo.
Se conoce por el documento GB-A-2 319 420 una ayuda de aparcamiento asistida por radar para un vehículo, con la cual se puede determinar la longitud de un hueco de aparcamiento.
Se conoce por el estado de la técnica, especialmente por el documento EP 0 305 907 A1, un dispositivo de ayuda de aparcamiento para vehículos automóviles con un emisor/receptor dispuesto en el lado exterior del vehículo. El emisor irradia una señal de emisión en sentido al menos aproximadamente perpendicular a la dirección del movimiento del vehículo, dentro de un pequeño intervalo angular. Si esta señal de emisión choca con un obstáculo, especialmente con dos vehículos aparcados a distancia uno de otro que limitan un hueco de aparcamiento, la señal de emisión es refleja entonces por estos vehículos aparcados. La señal de reflexión producida de esta manera es recibida por un equipo de recepción y suministrada a un equipo de evaluación en forma de un equipo de comparación que evalúa la señal de reflexión con respecto a la limitación del hueco de aparcamiento por los dos vehículos automóviles aparcados y calcula el tamaño del hueco de aparcamiento a partir del camino que ha recorrido el vehículo automóvil al pasar por delante de los dos vehículos aparcados.
El dispositivo de ayuda de aparcamiento descrito en el documento EP 0 305 907 A1 tiene el inconveniente de que la limitación del hueco de aparcamiento por los vehículos aparcados y, por tanto, la longitud del hueco de aparcamiento por evaluación de la señal de reflexión recibida solo pueden establecerse con inexactitud.
Por este motivo, partiendo de este estado de la técnica, el problema de la invención consiste en perfeccionar un dispositivo conocido, así como un procedimiento conocido y un programa de ordenador conocido para reconocer el trazado del contorno de un obstáculo de tal manera que sea posible una determinación más exacta de una limitación del contorno del obstáculo.
Este problema se resuelve por medio del dispositivo definido en la reivindicación 1. Expresado con mayor exactitud, la solución prevé un dispositivo para un vehículo destinado a reconocer el trazado del contorno de un obstáculo en los alrededores del vehículo cuando este vehículo pasa por delante del obstáculo, en donde el vehículo comprende al menos un equipo de emisión para emitir una señal de emisión hacia el obstáculo, al menos un equipo de recepción para recibir al menos una señal de reflexión n, con n = 1-N, por cada señal de emisión emitida, representando la señal de reflexión a la señal de emisión después de su reflexión en el obstáculo, y un equipo de evaluación para evaluar la señal de reflexión con respecto al trazado del contorno del obstáculo, y se caracteriza por el hecho de que el equipo de recepción recibe como señal de reflexión al menos una señal de reflexión de orden superior que no es la primera señal de reflexión recibida en el tiempo asociada a la señal de emisión, y el equipo de emisión está concebido para determinar una limitación del contorno del obstáculo transversalmente a la dirección de marcha por evaluación de la al menos una señal de reflexión de orden superior.
La evaluación reivindicada de al menos una señal de reflexión de orden superior para determinar la limitación del contorno de un obstáculo transversalmente a la dirección de la marcha, frente a una evaluación de la señal de reflexión n = 1 recibida primeramente en el tiempo, ofrece la ventaja de que la posición de la limitación del contorno del obstáculo puede ser reconocida con mayor precisión y en forma más próxima a la realidad. La primera señal de reflexión recibida es ciertamente en general más fuerte que las señales de reflexión de orden superior recibidas sucesivamente en el tiempo, pero no es la más estable. Por este motivo, ocurre en particular que justo esta señal no es óptimamente adecuada para determinar la limitación del obstáculo que discurre transversalmente a la dirección de marcha.
El uso de la segunda señal de reflexión recibida ha demostrado ser especialmente ventajoso para la determinación de la posición del obstáculo que se ve en la dirección de la marcha y que, por tanto, discurre transversalmente a esta dirección.
Frente a esto, la primera señal de reflexión recibida es especialmente adecuada para el establecimiento del trazado del contorno del obstáculo en sentido paralelo a la dirección de la marcha del vehículo. La segunda señal de reflexión recibida es menos adecuada para este fin, ya que en general es demasiado inestable en este aspecto.
Asimismo, es ventajoso que el equipo de emisión esté concebido para emitir la señal de emisión hacia los alrededores del vehículo dentro de un amplio ángulo que sea mayor que un ángulo de limitación prefijado. De esta manera, se obtiene un gran número de señales de reflexión respectivamente derivadas de una misma señal de emisión, por reflexión en diferentes puntos del obstáculo. El gran número de señales de reflexión disponible entonces por cada señal de emisión hace posible en principio una determinación más exacta del trazado del contorno del obstáculo. Además, es ventajoso que el equipo de recepción reciba una pluralidad de N señales de reflexión por cada señal de emisión dentro de una ventana de tiempo prefijada después de emitir la señal de emisión. De esta manera, la evaluación de las señales de reflexión puede configurarse como más efectiva, debido a una evaluación de señales de reflexión que son recibidas más tarde por el equipo de recepción que un intervalo de tiempo definido por la ventana de tiempo, tienen en general poca fuerza expresiva debido a que son demasiados débiles. Para la evaluación de estas señales no es necesario gastar ninguna capacidad del dispositivo ni especialmente del equipo de evaluación.
La presente invención se emplea para determinar la longitud de un hueco de aparcamiento que está formado por dos obstáculos posicionados lejos uno de otro, especialmente dos vehículos aparcados. Con ayuda de la invención se captan entonces primeramente con mucha exactitud las dos limitaciones del hueco de aparcamiento, para establecer a continuación la longitud del hueco de aparcamiento como la distancia entre las dos limitaciones en forma de un camino recorrido por un vehículo circulante entre las dos limitaciones.
Por último, es ventajoso que una persona, especialmente el conductor del vehículo, sea informada sobre el trazado del contorno del obstáculo en los alrededores del vehículo y/o sobre el contorno y/o la longitud del hueco de aparcamiento con ayuda de un equipo de salida.
El problema anteriormente definido de la invención se resuelve también por medio de un procedimiento para reconocer el trazado del contorno de un obstáculo, así como medio de un programa de ordenador para la puesta en práctica de este procedimiento. Las ventajas de este procedimiento y del programa de ordenador corresponden a las ventajas anteriormente descritas con respecto al dispositivo.
Otras ejecuciones ventajosas del dispositivo, del procedimiento y del programa de ordenador son objeto de las reivindicaciones dependientes.
Se muestra en el dibujo:
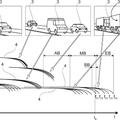
La figura 1, una situación de partida típica para la aplicación de la invención;
La figura 2, un dispositivo según la invención;
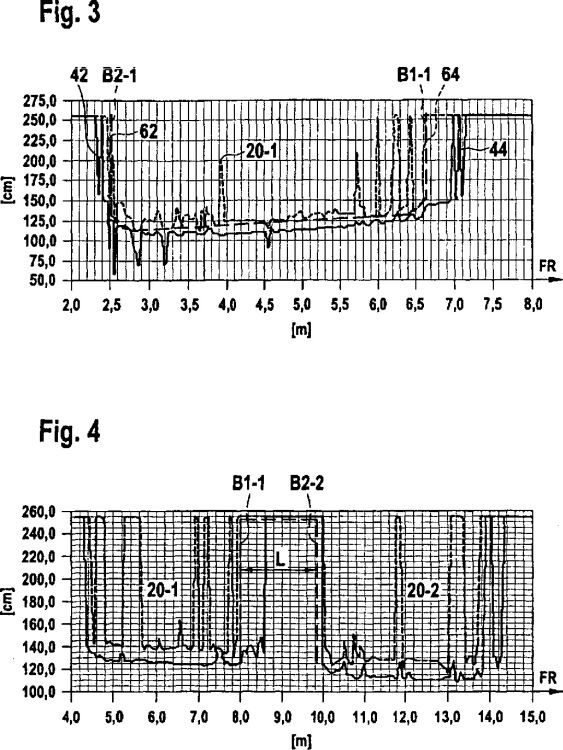
La figura 3, la curva de evolución de señales de reflexión de primero y segundo órdenes al acotar el tamaño de un obstáculo; y
La figura 4, la curva de evolución de señales de reflexión recibidas al acotar el tamaño de un hueco de aparcamiento.
A continuación, se describe detalladamente la invención ayudándose...
Reivindicaciones:
1. Dispositivo (100) para un vehículo (30) destinado a reconocer el trazado del contorno de un obstáculo (20-1, 20-2) en los alrededores del vehículo (30) cuando este vehículo con el dispositivo pasa por delante del obstáculo (20-1, 20-2), que comprende:
al menos un equipo de emisión (110) configurado como un sensor de ultrasonidos para emitir una señal de emisión hacia el obstáculo (20-1, 20-2);
al menos un equipo de recepción (120) para recibir al menos una señal de reflexión n, donde n = 1-N, por cada señal de emisión emitida, representando la señal de reflexión a la señal de emisión después de su reflexión en el obstáculo (20-1, 20-2); y
un equipo de evaluación (130) para evaluar la señal de reflexión con respecto al trazado del contorno del obstáculo (20-1, 20-2); estando el equipo de evaluación (130) concebido para determinar la longitud (L) de un hueco de aparcamiento que está formado por dos obstáculos (20-1, 20-2) posicionados a cierta distancia uno de otro, especialmente por dos vehículos aparcados, cuando el vehículo (30) pasa por delante de ellos, a cuyo fin dicho equipo de evaluación capta la limitación (B1) - delantera en la dirección de marcha (FR) - del primer obstáculo (20-1) y la limitación trasera (B2) del segundo obstáculo (20-2) y establece la longitud (L) del hueco de aparcamiento como la distancia entre las dos limitaciones (B1, B2) en forma del camino recorrido por el vehículo circulante (30) entre las dos limitaciones, y estando concebido el equipo de recepción (120) para recibir la primera señal de reflexión (n=1); y el equipo de evaluación (130) está concebido para evaluar la primera señal de reflexión recibida (n=1) con respecto al trazado del contorno del obstáculo en sentido paralelo a la dirección de marcha (FR) del vehículo (30),
caracterizado por el hecho de que
el equipo de recepción (120) recibe como señal de reflexión al menos una señal de reflexión de orden superior (n > 2) que no es la primera (n=1) señal de reflexión recibida en el tiempo asociada a la señal de emisión; y
el equipo de evaluación (130) está concebido para determinar una limitación (B1, B2) del contorno del obstáculo en la dirección de marcha (FR) no sobre la base de la señal de reflexión n=1 primeramente recibida, sino por evaluación de la al menos una señal de reflexión de orden superior (n > 2) y realizar el cálculo de la posición de la limitación del obstáculo (20-1, 20-2) por evaluación de la al menos una señal de reflexión de orden superior (n > 2).
2. Dispositivo según la reivindicación 1, caracterizado por el hecho de que la señal de reflexión consiste en la señal de reflexión de segundo orden (n=2).
3. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que el equipo de emisión (110) está concebido para emitir hacia los alrededores del vehículo (30) la señal de emisión dentro de un amplio ángulo que es mayor que un ángulo de limitación prefijado.
4. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que el equipo de recepción (120) recibe una pluralidad de N señales de reflexión por cada señal de emisión dentro de una ventana de tiempo prefijada después de emitir la señal de emisión.
5. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado por un equipo de salida (150) para proporcionar información, especialmente óptica, a una persona sobre el trazado del contorno del al menos un obstáculo (20-1, 20-2) y/o sobre el contorno y/o la longitud (L) del hueco de aparcamiento.
6. Procedimiento para reconocer el trazado del contorno de un obstáculo (20-1, 20-2) y para determinar la longitud (L) de un hueco de aparcamiento que está formado por dos obstáculos (20-1, 20-2) posicionados a cierta distancia uno de otro, especialmente por dos vehículos aparcados, cuando el vehículo (30) pasa por delante de éstos, que comprende los pasos siguientes:
emitir una señal de emisión hacia el obstáculo por medio de un equipo de emisión (110), configurado como sensor de ultrasonidos, desde posiciones diferentes a lo largo de una dirección de movimiento (FR) que pasa por delante del obstáculo;
recibir al menos una señal de reflexión n, con n=1-N, por cada señal de emisión, representando la señal de reflexión a la señal de emisión después de la reflexión de ésta en el obstáculo;
evaluar la señal de reflexión recibida con respecto al trazado del contorno del obstáculo (20-1, 20-2); y
captar la limitación (B1) - delantera en la dirección de marcha (FR) - del primer obstáculo (20-1) y la limitación trasera (B2) del segundo obstáculo (20-2) y establecer la longitud (L) del hueco de aparcamiento como la distancia entre las dos limitaciones (B1, B2) en forma del camino recorrido por el vehículo circulante (30) entre las dos limitaciones, efectuándose el trazado del contorno del obstáculo en sentido paralelo a la dirección de movimiento (FR) por evaluación de la primera señal de reflexión recibida (n=1),
caracterizado por el hecho de que
como señal de reflexión se recibe al menos una señal de reflexión de orden superior (n > 2), especialmente la señal de reflexión de segundo orden (n=2), la cual no es la primera (n=1) señal de reflexión recibida en el tiempo asociada a la señal de emisión;
se efectúa una determinación de una limitación (B1, B2) del contorno del obstáculo en la dirección de movimiento (FR) no sobre la base de la señal de reflexión n=1 primeramente recibida, sino por evaluación de la al menos una señal de reflexión de orden superior; y
se realiza el cálculo de la posición de la limitación del obstáculo (20-1, 20-2) por evaluación de la al menos una señal de reflexión de orden superior (n > 2).
7. Procedimiento según la reivindicación 6, caracterizado por el hecho de que la señal de emisión es emitida hacia los alrededores del vehículo (30) dentro de un amplio ángulo que es mayor que un ángulo de limitación prefijado.
8. Procedimiento según cualquiera de las reivindicaciones 6 ó 7, caracterizado por el hecho de que la recepción de una pluralidad de N señales de reflexión por cada señal de emisión emitida se efectúa dentro de una ventana de tiempo prefijada después de emitir la señal de emisión.
9. Programa de ordenador con código de programación para reconocer el trazado del contorno de un obstáculo (20-1, 20-2), caracterizado por el hecho de que el código de programación está concebido para la puesta en práctica del procedimiento según cualquiera de las reivindicaciones 6 a 8.
10. Programa de ordenador según la reivindicación 9, caracterizado por el hecho de que el código de programación está almacenado en un soporte de datos (132) legible por ordenador.
Patentes similares o relacionadas:
Método para la clasificación automática de objetos de radar, del 27 de Mayo de 2020, de HENSOLDT Sensors GmbH: Método para clasificar objetos de radar, en donde - una señal recibida se procesa en un canal de entrada dentro de una pluralidad de intervalos de integración coherentes sucesivos […]
Detección de barcos en datos de radar de interferometría, del 15 de Enero de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para averiguar una posición y una dirección de navegación en cada caso para uno o varios vehículos acuáticos que navegan en el agua a partir de datos de interferometría […]
 Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Sistema y método de obtención de imágenes, del 19 de Junio de 2019, de TELEDYNE AUSTRALIA PTY LTD: Un sistema de obtención de imágenes de radar para capturar una imagen de un objeto dentro de un área de interés a través de al menos un impedimento visual, dicho sistema […]
Clasificación de perfiles de rango, del 13 de Junio de 2019, de BAE SYSTEMS PLC: Un método para clasificar un perfil de rango dado, que comprende: (i) recibir el perfil de rango dado que ha de ser clasificado; (ii) agrupar fuentes de información que […]
Método y sistema para medir el contenido energético del gas, del 22 de Mayo de 2019, de SP Technical Research Institute Of Sweden: Un método para medir el contenido energético de un gas, que comprende: medir la velocidad del sonido en el gas; medir la permitividad relativa […]
Búsqueda e identificación electromagnética en zonas de campo cercano, del 8 de Mayo de 2019, de Levitection Ltd: Un procedimiento de detección, que comprende las etapas de: (a) transmitir secuencialmente una señal de cada uno de una pluralidad de transmisores (TE); (b) recibir, […]
Operación de radar con capacidad Doppler aumentada, del 20 de Febrero de 2019, de Lee, Robert W: Método para utilizar reflexiones de energía de ondas de uno o de varios objetos reflejantes para caracterizar ciertas propiedades de estos […]