Procedimiento de clasificación de vehículos en movimiento.
Procedimiento de clasificación de vehículos (3), en el que se acotan vehículos (3) al pasar por un cono de radar (12) formado por una radiación de radar (11),
para lo cual las superficies de los vehículos (3) solicitadas con radiación de radar (11) reflejan esta radiación de radar (11) y generan señales de medida (4) con frecuencia correspondientes al desplazamiento Doppler, cuyo procedimiento comprende los pasos siguientes:
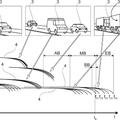
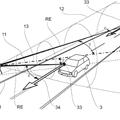
a) disponer un aparato de radar (1) dotado de resolución angular - que suministra señales de medida (4) con frecuencias correspondientes al desplazamiento Doppler, a partir de las cuales se pueden derivar distancias radiales (RE), ángulos de objeto (γ) y velocidad de radiales - a una altura de instalación vertical (vAH) con respecto a la superficie de una calzada (2) y bajo un ángulo de instalación agudo horizontal (α) con un borde de la calzada (2),
b) emitir por medio del aparato de radar (1) una radiación de radar (11) formadora de un cono de radar (12) y capturar, en varios instantes de medida dentro de un tiempo de medida (t), las señales de medida (4) de al menos un vehículo (3) que pasa por el cono de radar (12),
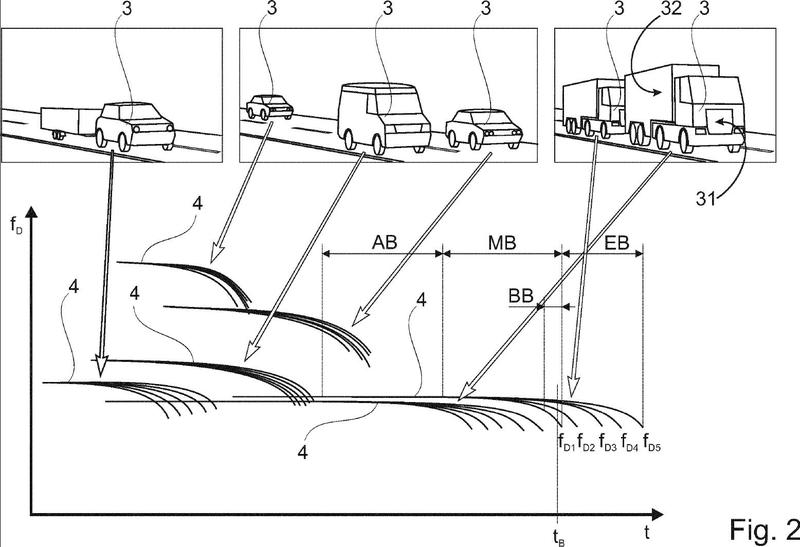
c) almacenar las frecuencias de las señales de medida capturadas (4) de vehículos acotados (3) como funciones del tiempo de medida (t) y formar un espectrograma por vehículo (3) en forma de una evolución temporal de las frecuencias Doppler de las señales de medida capturadas de vehículos acotados,
d) comprobar los espectrogramas en busca de una respectiva zona de evaluación (BB) con un ancho de banda máximo de la frecuencia y fijar al menos un instante de medida como instante de valoración (tB) en la respectiva zona de valoración (BB),
e) comparar estas zonas de valoración (BB) con zonas de valoración de espectrogramas almacenados para diferentes clases de vehículos y asignarlas al espectrograma más semejante para clasificar así los vehículos circulantes (3), y
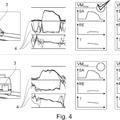
f) derivar ángulos de objeto (γ) de las señales de medida (4) en al menos un instante de valoración (tB) dentro de las zonas de valoración (BB) con un ancho de banda máximo, almacenándose siempre los respectivos ángulos de objeto derivados (γ) para el instante de valoración correspondiente (tB) como una función de la frecuencia y comparándose la evolución de la función con modelos comparativos (VM) almacenados para diferentes clases de vehículos a fin de verificar la clasificación de los vehículos (3).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13179175.
Solicitante: JENOPTIK ROBOT GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Opladener Straße 202 40789 Monheim ALEMANIA.
Inventor/es: LEHNING,MICHAEL, PRÖFROCK,DIMA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/91 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para el control de tráfico (G01S 13/93 tiene prioridad).
- G01S7/41 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
- G08G1/015 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › con disposiciones para distinguir dos o más tipos de vehículos, p. ej. distinción entre automóviles y ciclos.
PDF original: ES-2764775_T3.pdf

Reivindicaciones:
1. Procedimiento de clasificación de vehículos (3) , en el que se acotan vehículos (3) al pasar por un cono de radar (12) formado por una radiación de radar (11) , para lo cual las superficies de los vehículos (3) solicitadas con radiación de radar (11) reflejan esta radiación de radar (11) y generan señales de medida (4) con frecuencia correspondientes al desplazamiento Doppler, cuyo procedimiento comprende los pasos siguientes:
a) disponer un aparato de radar (1) dotado de resolución angular - que suministra señales de medida (4) con frecuencias correspondientes al desplazamiento Doppler, a partir de las cuales se pueden derivar distancias radiales (RE) , ángulos de objeto (g) y velocidad de radiales - a una altura de instalación vertical (vAH) con respecto a la superficie de una calzada (2) y bajo un ángulo de instalación agudo horizontal (a) con un borde de la calzada (2) ,
b) emitir por medio del aparato de radar (1) una radiación de radar (11) formadora de un cono de radar (12) y capturar, en varios instantes de medida dentro de un tiempo de medida (t) , las señales de medida (4) de al menos un vehículo (3) que pasa por el cono de radar (12) ,
c) almacenar las frecuencias de las señales de medida capturadas (4) de vehículos acotados (3) como funciones del tiempo de medida (t) y formar un espectrograma por vehículo (3) en forma de una evolución temporal de las frecuencias Doppler de las señales de medida capturadas de vehículos acotados,
d) comprobar los espectrogramas en busca de una respectiva zona de evaluación (BB) con un ancho de banda máximo de la frecuencia y fijar al menos un instante de medida como instante de valoración (tB) en la respectiva zona de valoración (BB) ,
e) comparar estas zonas de valoración (BB) con zonas de valoración de espectrogramas almacenados para diferentes clases de vehículos y asignarlas al espectrograma más semejante para clasificar así los vehículos circulantes (3) , y
f) derivar ángulos de objeto (y) de las señales de medida (4) en al menos un instante de valoración (tB) dentro de las zonas de valoración (BB) con un ancho de banda máximo, almacenándose siempre los respectivos ángulos de objeto derivados (y) para el instante de valoración correspondiente (tB) como una función de la frecuencia y comparándose la evolución de la función con modelos comparativos (VM) almacenados para diferentes clases de vehículos a fin de verificar la clasificación de los vehículos (3) .
2. Procedimiento de clasificación de vehículos (3) , en el que se acotan vehículos (3) al pasar por un cono de radar (12) formado por una radiación de radar (11) , para lo cual las superficies de los vehículos (3) solicitadas con radiación de radar (11) reflejan esta radiación de radar (11) y generan señales de medida (4) con frecuencias correspondientes al desplazamiento Doppler, cuyo procedimiento comprende los pasos siguientes:
a) disponer un aparato de radar (1) dotado de resolución angular - que suministra señales de medida (4) con frecuencias correspondientes al desplazamiento Doppler, a partir de las cuales se pueden derivar distancias radiales (RE) , ángulos de objeto (y) y velocidades radiales - a una altura de instalación vertical (vAH) con respecto a la superficie de una calzada (2) y bajo un ángulo de instalación agudo horizontal (a) con respecto a un borde de la calzada (2) ,
b) emitir por medio del aparato de radar (1) una radiación de radar (11) formadora de un cono de radar (12) y capturar en varios instantes de medida dentro de un tiempo de medida (t) las señales de medida (4) de al menos un vehículo (3) que pasa por el cono de radar (12) ,
c) almacenar las frecuencias de las señales de medida capturadas (4) de vehículos acotados (3) como funciones del tiempo de medida (t) y formar un espectrograma por vehículo (3) en forma de una evolución temporal de las frecuencias Doppler de las señales de medida capturadas de vehículos acotados,
d) comprobar los espectrogramas en busca de una respectiva zona de valoración (BB) con un ancho de banda máximo de la frecuencia y fijar al menos un instante de medida como instante de valoración (tB) en la respectiva zona de valoración (BB) ,
e) comparar estas zonas de valoración (BB) con zonas de valoración de espectrogramas almacenados para diferentes clases de vehículos y asignarlas al espectrograma más semejante para clasificar así los vehículos circulantes (3) , y
f) derivar distancias radiales (RE) a partir de las señales de medida (4) en el al menos un instante de valoración (tB) dentro de las zonas de valoración (BB) con un ancho de banda máximo, almacenándose siempre las respectivas distancias radiales derivadas (RE) para el instante de valoración correspondiente (tB) como una función de la frecuencia y comparando la evolución de las funciones con modelos comparativos (VM) almacenados para diferentes clases de vehículos a fin de verificar la clasificación de los vehículos (3) .
3. Procedimiento de clasificación de vehículos (3) , en el que se acotan vehículos (3) al pasar por un cono de radar (12) formado por una radiación de radar (11) , para lo cual las superficies de los vehículos (3) solicitadas con radiación de radar (11) reflejan esta radiación de radar (11) y generan señales de medida (4) con frecuencias correspondientes al desplazamiento Doppler, cuyo procedimiento comprende los pasos siguientes:
a) disponer un aparato de radar (1) dotado de resolución angular - que suministra señales de medida (4) con frecuencias correspondientes al desplazamiento Doppler, a partir de las cuales se pueden derivar distancias radiales (RE) , ángulos de objeto (y) y velocidades radiales - a una altura de instalación vertical (vAH) con respecto a la superficie de una calzada (2) y bajo un ángulo de instalación agudo horizontal (a) con respecto a un borde de la calzada (2) ,
b) emitir por medio del aparato de radar (1) una radiación de radar (11) formadora de un cono de radar (12) y capturar en varios instantes de medida dentro de un tiempo de medida (t) las señales de medida (4) de al menos un vehículo (3) que circula por el cono de radar (12) ,
c) almacenar las frecuencias de las señales de medida capturadas (4) de vehículos acotados (3) como funciones del tiempo de medición (t) y formar un espectrograma por vehículo (3) en forma de una evolución temporal de las frecuencias Doppler de las señales de medida capturadas de vehículos acotados,
d) comprobar los espectrogramas en busca de una respectiva zona de valoración (BB) con un ancho de banda máximo de la frecuencia y fijar al menos un instante de medida como instante de valoración (tB) en la respectiva zona de valoración BB,
e) comparar dichas zonas de valoración (BB) con zonas de valoración de espectrogramas almacenados para diferentes clases de vehículos y asignarlas al espectrograma más semejante para clasificar así los vehículos circulantes (3) y
f) almacenar amplitudes (SA) de las señales de medida (4) , obtenidas a partir de las señales de medida (4) , en el al menos uno de los instantes de valoración (tB) dentro de las zonas de valoración (BB) con un ancho de banda máximo, almacenándose siempre las amplitudes (SA) de las señales de medida (4) para el instante de valoración correspondiente (tB) como una función de la frecuencia y comparándose la evolución de las funciones con modelos comparativos (VM) almacenados para diferentes clases de vehículo a fin de verificar la clasificación de los vehículos (3) .
4. Procedimiento según las reivindicaciones 1, 2 o 3, caracterizado por que se efectúa una modelación del tamaño del vehículo a partir de la comparación de todas las funciones formadas con modelos comparativos almacenados (VM) .
Patentes similares o relacionadas:
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Sistema de asistencia al pilotaje de una aeronave, en particular, de ayuda al aterrizaje, al apontaje y a la navegación, del 19 de Febrero de 2020, de THALES: Sistema de asistencia al pilotaje de una aeronave en la fase de aterrizaje o apontaje, que comprende unos medios de medición adecuados para realizar mediciones […]
Dispositivo para la gestión y control del tráfico, y apoyo a la conducción, del 7 de Noviembre de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico para gestión y control del tráfico para captación y suministro de información, que se caracteriza por tener forma de prisma en el que se diferencian […]
Dispositivo de tráfico para controlar la distancia de seguridad, del 6 de Junio de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico para controlar la distancia de seguridad entre vehículos que se caracteriza por tener forma cilíndrica en el que […]
SISTEMA DE POSICIONAMIENTO PARA MEDIO DE TRANSPORTE HYPERLOOP, del 18 de Octubre de 2018, de AUTO DRIVE SOLUTIONS S.L: Sistema de posicionamiento para el medio de transporte hyperloop que comprende un conjunto de lectores instalados en la vaina o pod que […]
Método y aparato para integración de sensores distribuidos y radar de vigilancia en aeropuertos para mitigar puntos ciegos, del 24 de Mayo de 2017, de RAYTHEON COMPANY: Un método que comprende: emplear un primer radar ; identificar un punto ciego en cobertura del primer radar; proporcionar […]
Sensor de radar integrado en la calzada, del 17 de Mayo de 2017, de VOLTRA solutions GmbH: Dispositivo para el registro de informaciones de tráfico con al menos un dispositivo de sensor dispuesto de modo insertado en la calzada , en el que […]
 RADAR VIRTUAL, del 26 de Noviembre de 2010, de FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS
UNIVERSIDAD DEL PAIS VASCO/EUSKAL HERRIKO UNIBERTSITATEA
FUNDACION EUROPEAN VIRTUAL ENGINEERING FUNDAZIOA (EUVE): Radar virtual, que incluye, al menos, una aeronave (AN), con emisor de datos en tiempo real; un sistema de adquisición (BS) donde se recogen […]
RADAR VIRTUAL, del 26 de Noviembre de 2010, de FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS
UNIVERSIDAD DEL PAIS VASCO/EUSKAL HERRIKO UNIBERTSITATEA
FUNDACION EUROPEAN VIRTUAL ENGINEERING FUNDAZIOA (EUVE): Radar virtual, que incluye, al menos, una aeronave (AN), con emisor de datos en tiempo real; un sistema de adquisición (BS) donde se recogen […]