PINZA DE SOLDADURA POR PUNTOS CON COMPENSACION DE LAS PINZAS CON UNA UNIDAD DE COMPENSACION QUE PRESENTA UN ELEMENTO DE CONEXION ARQUEADO.
Pinza de soldadura por puntos (1) con compensación de las pinzas,
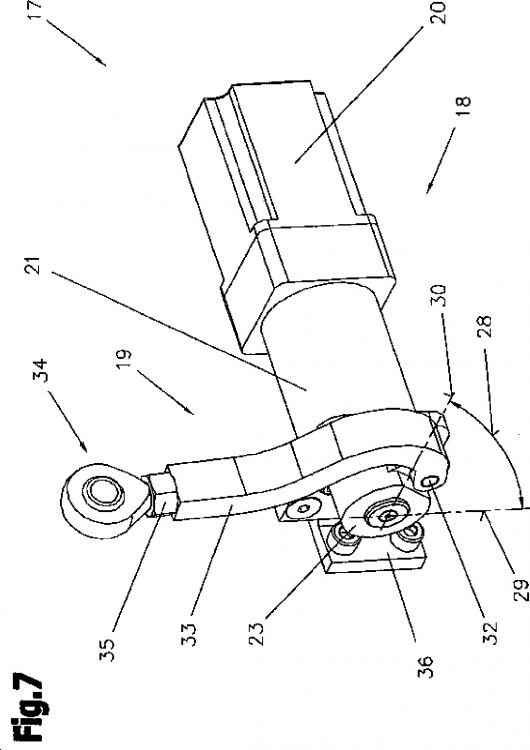
con un cuerpo base de la pinza (4), dos brazos de pinza (6, 7) y una unidad de compensación (17) que une de forma móvil uno de los brazos de pinza (6, 7) con el cuerpo base de la pinza (4), y que está realizado para convertir un movimiento de giro en un movimiento lineal, constando la unidad de compensación (17) de una unidad de accionamiento (18) y de un elemento de conexión (19), estando fijado el elemento de conexión (19) de modo excéntrico y giratorio en un disco excéntrico (23) fijado en la unidad de accionamiento (18), caracterizada porque una parte del disco de la excéntrica (23) está realizado como palanca (26) con un orificio (27) para la fijación del elemento de conexión (19), estando realizado el elemento de conexión (19) en una zona extrema que va fijada a la palanca por medio de un orificio (31), con forma arqueada que se corresponde esencialmente con el disco de la excéntrica (23)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AT2006/000345.
Solicitante: FRONIUS INTERNATIONAL GMBH.
Nacionalidad solicitante: Austria.
Dirección: VORCHDORFERSTRASSE 40,4643 PETTENBACH.
Inventor/es: STIEGLBAUER,WALTER, KRONEGGER,WOLF, SCHIEFERMULLER,ROBERT.
Fecha de Publicación: .
Fecha Concesión Europea: 30 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- B23K11/31D
Clasificación PCT:
- B23K11/31 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 11/00 Soldadura por resistencia; Seccionamiento por calentamiento por resistencia. › Portaelectrodos (no limitados a la soldadura por resistencia eléctrica o al seccionamiento por calentamiento por resistencia B23K 37/02).
Fragmento de la descripción:
Pinza de soldadura por puntos con compensación de las pinzas con una unidad de compensación que presenta un elemento de conexión arqueado.
La invención se refiere a una pinza de soldadura por puntos con compensación de las pinzas, con un cuerpo base de la pinza, dos brazos de pinza y una unidad de compensación que une uno de los brazos de la pinza con el cuerpo base de la pinza y que está realizado para convertir un movimiento de giro en un movimiento lineal, constando la unidad de compensación de una unidad de accionamiento y de un elemento de conexión, y estando el elemento de conexión fijado de modo excéntrico y giratorio en un disco excéntrico fijado en la unidad de accionamiento.
Una pinza de soldadura por puntos de esta clase se conoce por ejemplo por el documento WO 02/078892 A1, lográndose el movimiento de compensación de una unidad de accionamiento que a través de una excéntrica está unida a un elemento de conexión, para lo cual se convierte el movimiento de giro de la unidad de accionamiento en un movimiento longitudinal del elemento de conexión.
También del documento DE 103 44 056 A1 se deduce una pinza de soldadura por puntos de esta clase con una unidad de compensación en la que el accionamiento de compensación está unido a través de una transmisión por excéntrica con las palancas de articulación de la pinza de soldadura. Además de esto la pinza de soldadura por puntos está realizada de tal modo que se pueda renunciar a un accionamiento de compensación propio, al quedar éste sustituido por unos medios mecánicos auxiliares sencillos.
Por el estado de la técnica se conocen unidades de compensación que convierten el movimiento de giro por medio de una rosca en un movimiento lineal. Por el documento DE 202 14 970 U1 se conoce por ejemplo una pinza de soldadura de un robot con dispositivo compensador, en la que un motor eléctrico acciona un husillo y el movimiento lineal resultante de ello se utiliza como movimiento de compensación para los brazos de pinza de una pinza de soldadura. Dado que en este caso el husillo tiene un efecto autoblocante, la unidad de compensación está realizada con elementos elásticos tales como muelles para posibilitar la elasticidad del movimiento de compensación.
El inconveniente en este caso es que en una realización de esta clase de la unidad de compensación se requieren elementos elásticos adicionales para la amortiguación elástica del movimiento de compensación. Esto incrementa el coste de construcción y el gasto de mantenimiento. Además, en esta clase de accionamientos por husillo se producen con frecuencia problemas térmicos que son imputables a las elevadas pérdidas por rozamiento causadas por el accionamiento por husillo.
El objetivo de la invención consiste en crear una pinza de soldadura por puntos con compensación de las pinzas en la que la unidad de compensación convierta de forma sencilla el movimiento de giro de un motor eléctrico en un movimiento lineal, es decir en un movimiento de compensación de un brazo de pinza. Se trata de evitar o por lo menos reducir los inconvenientes del estado de la técnica.
Una pinza de soldadura por puntos conforme a la invención está definida en la reivindicación 1.
Mediante la realización de la unidad de compensación conforme a la invención según las reivindicaciones 2 a 5 se evita de forma ventajosa un efecto autoblocante de la unidad de compensación, por lo que no se requieren elementos adicionales con efecto elástico.
Gracias a la medida de que la unidad de accionamiento está situada en el cuerpo base de la pinza o en uno de los brazos de la pinza se crea de forma ventajosa la posibilidad de disponer de modo flexible la unidad de accionamiento o la unidad de compensación.
Gracias al elemento de medida dispuesto en el elemento de conexión se consigue de forma ventajosa que se logre una activación exacta referida a la fuerza para una fuerza de compensación exactamente definida.
La presente invención se describe con mayor detalle sirviéndose de los dibujos esquemáticos adjuntos. Éstos muestran:
Fig. 1 una vista de una pinza de soldadura por puntos en la posición de origen con una unidad de compensación conforme a la invención, representados de forma esquemática y simplificada;
Fig. 2 la pinza de soldadura por puntos según la Fig. 1, posicionada en una pieza;
Fig. 3 la pinza de soldadura por puntos según la Fig. 1, con uno de los brazos de la pinza situado en contacto con la pieza;
Fig. 4 la pinza de soldadura por puntos según la Fig. 1, durante la realización de una soldadura por resistencia;
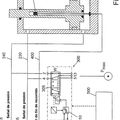
Fig. 5 la disposición de la unidad de compensadora conforme a la invención, en una representación esquemática;
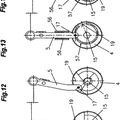
Fig. 6 la unidad de compensación según la Fig. 5, en una posición del movimiento de compensación; y
Fig. 7 la unidad de compensación según la Fig. 5, en otra posición del movimiento de compensación.
En la Fig. 1 está representada una pinza de soldadura por puntos 1 para la soldadura por resistencia de piezas 2, estando manipulada la pinza de soldadura por puntos 1 preferentemente por un robot. La fijación tiene lugar por medio de una brida del robot 3 situada en el extremo del cuerpo base de la pinza. El otro extremo del cuerpo base de la pinza 4 está realizado de tal modo que un bulón 5 forma un eje de giro para toda la pinza de soldadura por puntos 1, alrededor del cual van apoyados en el bulón 5 de modo giratorio un brazo de pinza 6 y otro brazo de pinza 7 a través de un brazo giratorio 8, 9. Entre el bulón 5 y la brida del robot 3 los brazos de pinza 6, 7 están unidos entre sí a través de un accionamiento principal 10. De este modo se forma lo que se denomina una pinza de soldadura por puntos 1 en X. En la zona anterior de los brazos de pinza 6, 7, en particular en el extremo anterior, están dispuestos sendos porta-electrodos 11, 12 para alojar en cada uno de ellos un electrodo 13, 14.
Entre los electrodos 13, 14 se encuentra durante el proceso de soldadura la pieza 2 que se trata de soldar, que se trata por ejemplo de dos componentes 15, 16. Para realizar la soldadura es preciso que primeramente el robot posicione la pinza de soldadura 1. Para ello la pinza de soldadura por puntos 1 se encuentra en estado abierto conforme a la Fig. 1, es decir en una posición de origen o posición base. En las Fig. 2 a 4 están representadas las distintas fases de trabajo de la pinza de soldadura por puntos 1 hasta realizar la soldadura por resistencia.
Antes de que el robot pueda posicionar la pinza de soldadura por puntos 1 en una posición de soldadura de los componentes prefijados 15, 16 es necesario que los brazos de la pinza 6, 7 estén suficientemente abiertos. Esto se realiza por medio del accionamiento principal 10 que en principio mueve los brazos de la pinza 6, 7 en sentido diametralmente opuesto. La apertura de los brazos de la pinza 6,7 tiene lugar teniendo en cuenta la forma de los componentes 15, 16, la tolerancia de los componentes 15, 16 y la precisión de posicionamiento del robot.
Al efectuar la apertura también se tiene en cuenta que el robot necesita un punto de partida o punto de referencia para que se puedan llevar los brazos de la pinza 6, 7 sin hacer contacto a la posición de soldadura de la pieza 2. El punto de referencia está definido por ejemplo en la superficie de contacto del electrodo 14 con el componente 16. Para que la superficie de contacto del electrodo 16 se sitúe en el punto de referencia, el brazo de la pinza 7 en el que va montado el electrodo 14 está unido al cuerpo base de la pinza 4 a través de una unidad de compensación 17. Mediante la correspondiente activación de la unidad de compensación 17, lo cual tiene lugar por medio del sistema de control de la pinza de soldadura por puntos 1, se mantiene el brazo de la pinza 7 o la superficie de contacto del electrodo 14, en el punto de referencia. De este modo se tiene la garantía de que la pinza de soldadura por puntos 1 se mantiene en la misma posición en cualquier posible posición de soldadura.
La unidad de compensación 17 provoca por lo tanto que la pinza de soldadura por puntos 1 o los brazos de la pinza 6, 7 se mantengan siempre en la misma posición, especialmente durante el proceso de posicionamiento del robot. De este modo el robot puede posicionar sin problemas la pinza de soldadura por puntos 1 o los brazos de la pinza 6, 7, en particular sin hacer contacto, en la posición de soldadura deseada de los componentes 15, 16.
Durante el proceso...
Reivindicaciones:
1. Pinza de soldadura por puntos (1) con compensación de las pinzas, con un cuerpo base de la pinza (4), dos brazos de pinza (6, 7) y una unidad de compensación (17) que une de forma móvil uno de los brazos de pinza (6, 7) con el cuerpo base de la pinza (4), y que está realizado para convertir un movimiento de giro en un movimiento lineal, constando la unidad de compensación (17) de una unidad de accionamiento (18) y de un elemento de conexión (19), estando fijado el elemento de conexión (19) de modo excéntrico y giratorio en un disco excéntrico (23) fijado en la unidad de accionamiento (18), caracterizada porque una parte del disco de la excéntrica (23) está realizado como palanca (26) con un orificio (27) para la fijación del elemento de conexión (19), estando realizado el elemento de conexión (19) en una zona extrema que va fijada a la palanca por medio de un orificio (31), con forma arqueada que se corresponde esencialmente con el disco de la excéntrica (23).
2. Pinza de soldadura por puntos (1) según la reivindicación 1, caracterizada porque el disco de la excéntrica (23) presenta un orificio (24) dispuesto en su centro para la fijación a prueba de torsión en la unidad de accionamiento (18).
3. Pinza de soldadura por puntos (1) según la reivindicación 1 ó 2, caracterizada porque el elemento de conexión (19) está situado en la zona extrema opuesta a la zona extrema de forma arqueada como puente (33), presentando un elemento de fijación para la fijación móvil y fija.
4. Pinza de soldadura por puntos (1) según la reivindicación 3, caracterizada porque el elemento de fijación (19) está realizado como tornillo de anilla (34).
5. Pinza de soldadura por puntos (1) según la reivindicación 4, caracterizada porque el tornillo de anilla (34) va fijado de modo liberable en el elemento de conexión (19).
6. Pinza de soldadura por puntos (1) según una de las reivindicaciones 1 a 5, caracterizada porque la unidad de accionamiento (18) está situada en el cuerpo base de la pinza (4).
7. Pinza de soldadura por puntos (1) según una de las reivindicaciones 1 a 5, caracterizada porque la unidad de accionamiento (18) está dispuesta en uno de los brazos de la pinza (6, 7).
8. Pinza de soldadura por puntos (1) según una de las reivindicaciones 1 a 7, caracterizada porque la unidad de accionamiento (18) está formada por un motor eléctrico (20).
9. Pinza de soldadura por puntos (1) según una de las reivindicaciones 1 a 7, caracterizada porque la unidad de accionamiento (18) está formada por un motor eléctrico (20) y un reductor (21).
10. Pinza de soldadura por puntos (1) según una de las reivindicaciones 1 a 9, caracterizada porque la unidad de accionamiento (18) está unida a una unidad de control.
11. Pinza de soldadura por puntos (1) según la reivindicación 10, caracterizada porque la unidad de control está integrada en el sistema de control para la pinza de soldadura por puntos (1).
12. Pinza de soldadura por puntos (1) según una de las reivindicaciones 1 a 11 caracterizada porque en el elemento de unión (19) y en la zona del puente (33) está dispuesto un elemento de medida y éste está unido con la unidad de control.
13. Pinza de soldadura por puntos (1) según la reivindicación 12, caracterizada porque el elemento de medida está formado por un sensor dinamométrico.
14. Pinza de soldadura por puntos (1) según la reivindicación 12, caracterizada porque el elemento de medida está formado por una galga extensométrica.
Patentes similares o relacionadas:
 DISPOSITIVO DE SOLDADURA CON UN CAPTADOR DE ESFUERZO MONTADO SOBRE UN BRAZO DE PINZA, del 15 de Marzo de 2011, de PEUGEOT CITROEN AUTOMOBILES SA: Dispositivo de soldadura que comprende brazos de pinza sobre los cuales están montados electrodos (2a, 2b), estando destinados los brazos de pinza a aplicar […]
DISPOSITIVO DE SOLDADURA CON UN CAPTADOR DE ESFUERZO MONTADO SOBRE UN BRAZO DE PINZA, del 15 de Marzo de 2011, de PEUGEOT CITROEN AUTOMOBILES SA: Dispositivo de soldadura que comprende brazos de pinza sobre los cuales están montados electrodos (2a, 2b), estando destinados los brazos de pinza a aplicar […]
 PROCEDIMIENTO PARA CONTROLAR UNA UNIDAD DE CILINDRO DE COMPENSACIÓN, EN PARTICULAR PARA UN DISPOSITIVO DE SOLDADURA, del 16 de Febrero de 2011, de NORGREN GMBH: Procedimiento para ajustar una compensación de peso para unos brazos portaelectrodos de un dispositivo de soldadura, presentando el dispositivo de soldadura por […]
PROCEDIMIENTO PARA CONTROLAR UNA UNIDAD DE CILINDRO DE COMPENSACIÓN, EN PARTICULAR PARA UN DISPOSITIVO DE SOLDADURA, del 16 de Febrero de 2011, de NORGREN GMBH: Procedimiento para ajustar una compensación de peso para unos brazos portaelectrodos de un dispositivo de soldadura, presentando el dispositivo de soldadura por […]
 PINZA DE SOLDADURA POR PUNTOS Y PROCEDIMIENTO PARA AJUSTAR LA PRESION DE UNA PINZA DE SOLDADURA POR PUNTOS, del 15 de Junio de 2010, de FRONIUS INTERNATIONAL GMBH: Pinza de soldadura por puntos para la soldadura por resistencia de piezas (3, 3''), con un accionamiento para el movimiento de los […]
PINZA DE SOLDADURA POR PUNTOS Y PROCEDIMIENTO PARA AJUSTAR LA PRESION DE UNA PINZA DE SOLDADURA POR PUNTOS, del 15 de Junio de 2010, de FRONIUS INTERNATIONAL GMBH: Pinza de soldadura por puntos para la soldadura por resistencia de piezas (3, 3''), con un accionamiento para el movimiento de los […]
Electrodo para una pinza de soldar, del 8 de Julio de 2020, de KME Special Products GmbH: Electrodo para una pinza de soldar que comprende un vástago de electrodo con un capuchón de soldar en el extremo, que está sujeto de manera desprendible a un soporte […]
Dispositivo de soldadura por resistencia, del 29 de Abril de 2020, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Dispositivo de soldadura por resistencia que comprende dos electrodos de soldadura dispuestos de manera opuesta, conectados a una fuente de corriente de soldadura […]
Dispositivo y procedimiento de sujeción de una parte de una pistola de soldadura, del 13 de Noviembre de 2019, de COMAU, INC: Dispositivo de manipulación y conexión de componentes de combinación conectable a un robot de múltiples ejes para ser utilizado en el […]
Robot articulado que lleva un cabezal de soldadura por resistencia eléctrica con electrodos ubicados en el mismo lado, procedimiento correspondiente de soldadura por resistencia eléctrica en un componente a soldar, del 7 de Agosto de 2019, de COMAU S.P.A.: Un robot articulado (R) que lleva un cabezal de soldadura por resistencia eléctrica (T) con electrodos ubicados en el mismo lado, el robot articulado (R) tiene una muñeca […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]