MEDIO DE ALMACENAMIENTO QUE ALMACENA UN PROGRAMA DE DETERMINACION DE POSICION VIRTUAL.
Un medio de almacenamiento que almacena un programa de determinación de posición virtual para hacer que un ordenador (30) lleve a cabo un proceso en un espacio virtual en base a una información (Da) de entrada obtenida desde un dispositivo (7) de entrada,
la información de entrada incluyendo datos de blanco que cambian según un cambio en una posición de un blanco predeterminado en un espacio real, el programa haciendo que el ordenador lleve a cabo:
una etapa (30, S52) de cálculo de datos de posición real para calcular datos de posición real que representan una posición del blanco en el espacio real utilizando los datos de blanco;
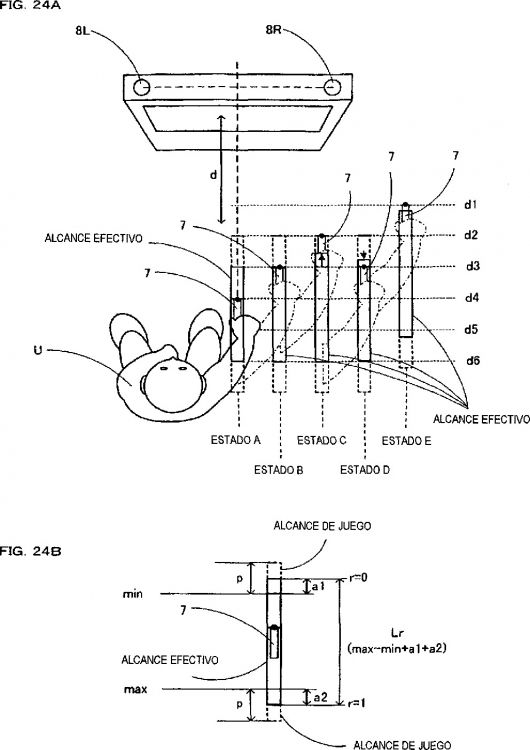
una etapa (30, S63, S66) de definición de alcance efectivo para definir un alcance efectivo de los datos de posición real como un alcance que se extiende desde un primer valor de límite hasta un segundo valor de límite, donde el primer valor de límite y el segundo límite están fijados como un valor de los datos de posición real;
una etapa (30, S95, S105, S130) de cálculo de datos de posición de alcance efectivo para calcular secuencialmente datos de posición de alcance efectivo que representan una posición de los datos de posición real con respecto al alcance efectivo como una referencia;
una etapa (30, S67, S54) de determinación de posición para determinar secuencialmente, en base a una operación predeterminada, dónde una posición de un objeto controlado,
en el espacio virtual, correspondiente a un valor de la posición de alcance efectivo, está situada en un alcance de un espacio virtual que está definido de antemano desde una posición asociada con el primer valor de límite hasta una posición asociada con el segundo valor de límite;
una etapa de actualización de alcance efectivo para modificar dinámicamente el primer valor de límite y el segundo valor de límite cuando el valor de los datos de posición real satisface una condición predeterminada; y
una etapa (30, S56) de proceso de visualización para visualizar el espacio virtual en un dispositivo (2) de visualización
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06009534.
Solicitante: NINTENDO CO. LIMITED.
Nacionalidad solicitante: Japón.
Dirección: 11-1, HOKOTATE-CHO, KAMITOBA,MINAMI-KU, KYOTO 601-8501.
Inventor/es: DOHTA,TAKUHIRO.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Mayo de 2006.
Fecha Concesión Europea: 18 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- A63F13/06
- A63F13/10
Clasificación PCT:
- A63F13/02
- A63F13/04
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Medio de almacenamiento que almacena un programa de determinación de posición virtual.
Antecedentes de la invención
La presente invención se refiere a un medio de almacenamiento que almacena un programa de determinación de posición virtual y, más en particular, a un medio de almacenamiento que almacena un programa de determinación de posición virtual para calcular la posición de un objeto virtual en un espacio virtual en base a la posición de un blanco en el espacio real.
En la técnica anterior, la Publicación de Patente japonesa abierta a inspección pública número 11-305935 (en lo sucesivo "Documento 1 de Patente"), por ejemplo, describe un sistema de detección de posición para tomar una imagen de una fuente de luz infrarroja y analizar la imagen obtenida para determinar una posición de mira de un arma de fuego.
Como un ejemplo de un sistema de detección de posición, el Documento 1 de Patente describe un vídeo juego de disparos en el que el jugador dispara a blancos utilizando, como un controlador de juego, un controlador con forma de arma de fuego dotado de un dispositivo de captura de imágenes. Se proporcionan cuatro fuentes de luz infrarroja, como blancos de formación de imágenes, cada una en una esquina de un tubo de rayos catódicos, y el dispositivo de captura de imágenes toma una imagen de las mismas. La posición del tubo de rayos catódicos a la que se está apuntando mediante el controlador con forma de arma de fuego se detecta en base a las posiciones de los blancos de formación de imágenes en la imagen obtenida. Un juego de disparos virtual se juega utilizando la posición a la que se está apuntando mediante el controlador con forma de arma de fuego como la posición de mira de arma de fuego. Tal y como se indica en el Párrafo 21 del Documento 1 de Patente, en un caso en que la distancia entre el dispositivo de captura de imágenes y el blanco (marcador) pueda cambiar libremente, la posición de mira de arma de fuego puede detectarse de manera precisa si el dispositivo de captura de imágenes presenta una función de zoom controlable y si la función de zoom se controla de manera que el marcador en la imagen obtenida siempre tenga un tamaño óptimo.
Sin embargo, en el Documento 1 de Patente no existe el concepto de que la posición del controlador de juego, que es un ejemplo de un dispositivo de entrada, en el espacio real se utilice como una entrada de control. En el sistema de detección de posición descrito en el Documento 1 de Patente, la posición del tubo de rayos catódicos a la que se está apuntando mediante el controlador con forma de arma de fuego se utiliza como una entrada, pero la posición señalada sólo representa una posición en la pantalla, no la posición del controlador en el espacio real. Aunque puede obtenerse la distancia entre el dispositivo de captura de imágenes y el marcador en el espacio real, la distancia sólo se utiliza para realizar correcciones. En otras palabras, la distancia es un tipo de valor que representa la posición del controlador en el espacio real, pero no se utiliza como una entrada de control.
Si la distancia entre el controlador de juego y el blanco de formación de imágenes se utiliza como una entrada de control, el alcance en el que el jugador puede mover el controlador de juego en la dirección de distancia será bastante grande. Por lo tanto, el alcance de entrada y la variación de entrada serán significativos, y en la técnica anterior resulta difícil asociar de manera apropiada un valor de este tipo con variaciones significativas con la posición del objeto controlado en el espacio virtual. Además, el lugar en el que el jugador genera la entrada de control varía dependiendo de la situación, modificando de ese modo el valor de la distancia, y es difícil asociarlo con una posición virtual apropiada. Es evidente que se producirán problemas similares no solamente con la distancia, que es un valor unidimensional, sino también cuando se detecte una posición tridimensional en el espacio real. Con estos problemas expuestos anteriormente, en los procedimientos de entrada de control convencionales no existe el concepto de que la posición del controlador en el espacio real se utilice directamente como una entrada de control.
En la técnica se conocen varios dispositivos de entrada manuales específicos que permiten controlar un sistema o indicar una posición en el espacio real.
El documento US 5 009 501 describe un sistema indicador de posición controlable de manera remota que permite determinar la posición relativa de dos cuerpos.
El documento US 2004/0218104 A1 describe una interfaz de usuario con un dispositivo de entrada de usuario de detección inercial manual para navegar en un menú de usuario mostrado en un dispositivo de visualización.
El documento US 5 898 421 describe un puntero de giroscopio para controlar la posición de un cursor en un dispositivo de visualización informático.
Resumen de la invención
Por lo tanto, un objeto de la presente invención es proporcionar un medio de almacenamiento que almacene un programa de determinación de posición virtual, el cual lleva a cabo una operación de control novedosa con un alto grado de libertad utilizando al mismo tiempo la posición de un blanco en el espacio real.
Este objeto se consigue mediante la invención definida en las reivindicaciones 1 y 10. Formas de realización de la invención se definen en las reivindicaciones dependientes.
Un primer aspecto de la presente invención está dirigido a un medio de almacenamiento que almacena un programa de determinación de posición virtual para hacer que un ordenador (30) lleve a cabo un proceso en un espacio virtual en base a una información (Da) de entrada obtenida desde un dispositivo (7) de entrada, incluyendo la información de entrada datos (Da1, Da2) de blanco que cambia según un cambio en una posición de un blanco predeterminado en un espacio real, haciendo el programa que el ordenador lleve a cabo: una etapa (S52) de cálculo de datos de posición real para calcular datos (Db3) de posición real que representan una posición del blanco en el espacio real utilizando los datos de blanco; una etapa (S63, S66) de definición de alcance efectivo para definir un alcance efectivo como un alcance que se extiende desde un primer límite hasta un segundo límite, donde el primer límite se representa mediante primeros datos de posición y el segundo límite se representa mediante segundos datos de posición; una etapa (S95, S105, S130) de cálculo de datos de posición de alcance efectivo para calcular datos de posición de alcance efectivo que representan una posición de un valor de los datos de posición real en el alcance efectivo; una etapa (S67, S54) de determinación de posición para determinar una posición de un objeto controlado en el espacio virtual a través de una operación basada en un valor de los datos de posición de alcance efectivo; y una etapa (S56) de proceso de visualización para visualizar el espacio virtual en un dispositivo (2) de visualización.
Según un segundo aspecto, en el primer aspecto, el programa de determinación de posición virtual hace que el ordenador lleve a cabo además una etapa (S91 a S94, S101 a S104, S121 a S129) de actualización de alcance efectivo para, cuando el valor de los datos de posición real esté fuera del alcance efectivo, actualizar el alcance efectivo desplazando el primer límite y el segundo límite de manera que el valor de los datos de posición real esté incluido en el alcance efectivo.
Según un tercer aspecto, en el primer aspecto, el programa de determinación de posición virtual hace que el ordenador lleve a cabo además una etapa (S91 a S94) de actualización de alcance efectivo para, cuando el valor de los datos de posición real esté fuera del alcance efectivo, actualizar el alcance efectivo desplazando el primer límite y el segundo límite de manera que uno de entre el primer límite y el segundo límite que esté más cerca del valor de los datos de posición real se vuelva igual al valor de los datos de posición real.
Según un cuarto aspecto, en el primer aspecto, el programa de determinación de posición virtual hace que el ordenador lleve a cabo además una segunda etapa (S121 a S129) de actualización de alcance efectivo para, cuando el valor de los datos de posición real esté fuera del alcance efectivo, actualizar el alcance efectivo desplazando el primer límite y el segundo límite de manera que uno de entre el primer límite y...
Reivindicaciones:
1. Un medio de almacenamiento que almacena un programa de determinación de posición virtual para hacer que un ordenador (30) lleve a cabo un proceso en un espacio virtual en base a una información (Da) de entrada obtenida desde un dispositivo (7) de entrada, la información de entrada incluyendo datos de blanco que cambian según un cambio en una posición de un blanco predeterminado en un espacio real, el programa haciendo que el ordenador lleve a cabo:
2. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 1, en el que la etapa de actualización de alcance efectivo incluye una etapa (30, S91 a S94, S101 a S104, S121 a S129) para, cuando el valor de los datos de posición real esté fuera del alcance efectivo, actualizar el alcance efectivo desplazando el primer valor de límite y el segundo valor de límite de manera que el valor de los datos de posición real esté incluido en el alcance efectivo.
3. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 1. en el que la etapa de actualización de alcance efectivo incluye una etapa (30, S91 a S94) para, cuando el valor de los datos de posición real esté fuera del alcance efectivo, actualizar el alcance efectivo desplazando el primer valor de límite y el segundo valor de límite de manera que uno de entre el primer valor de límite y el segundo valor de límite que esté más cerca del valor de los datos de posición real se vuelva igual al valor de los datos de posición real.
4. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 1, en el que la etapa de actualización de alcance efectivo incluye una etapa (30, S121 a S129) para, cuando el valor de los datos de posición real esté fuera del alcance efectivo, actualizar el alcance efectivo desplazando el primer valor de límite y el segundo valor de límite de manera que uno de entre el primer valor de límite y el segundo valor de límite que esté más cerca del valor de los datos de posición real se acerque al valor de los datos de posición real en una velocidad predeterminada.
5. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 1, en el que la etapa de cálculo de datos de posición de alcance efectivo calcula los datos de posición de alcance efectivo de manera que los datos de posición de alcance efectivo tomen un valor máximo cuando el valor de los datos de posición real sea igual al primer valor de límite y los datos de posición de alcance efectivo tomen un valor mínimo cuando el valor de los datos de posición real sea igual al segundo valor de límite.
6. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 1, en el que:
7. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 6, en el que la etapa (30, S106) de cálculo de datos de posición de alcance efectivo incluye una etapa de calcular los datos de posición de alcance efectivo de manera que los datos de posición de alcance efectivo tomen un valor máximo cuando el valor de los datos de posición real sea igual al primer valor de límite o supere el alcance efectivo en una dirección del primer valor de límite, y los datos de posición de alcance efectivo tomen un valor mínimo cuando el valor de los datos de posición real sea igual al segundo valor de límite o supere el alcance efectivo en una dirección del segundo valor de límite.
8. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 1, en el que:
9. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 8, en el que la etapa de cálculo de datos de posición de alcance efectivo incluye una etapa (30, S106) para calcular los datos de posición de alcance efectivo de manera que los datos de posición de alcance efectivo tomen un valor máximo cuando el valor de los datos de posición real sea igual al primer valor de límite o supere el alcance efectivo en una dirección del primer valor de límite, y los datos de posición de alcance efectivo tomen un valor mínimo cuando el valor de los datos de posición real sea igual al segundo valor de límite o supere el alcance efectivo en una dirección del segundo valor de límite.
10. El medio de almacenamiento que almacena un programa de determinación de posición virtual según la reivindicación 1 ó 2, en el que el programa comprende además: una etapa de normalización para, cuando el valor de los datos de posición real esté incluido en el alcance efectivo, normalizar el alcance efectivo y calcular un valor correspondiente a la posición de los datos de posición real obtenidos cuando se lleva a cabo la normalización; y en el que la etapa de cálculo calcula los datos de posición real basándose en el valor calculado en la etapa de normalización.
11. Sistema informático que comprende una memoria informática que almacena el programa de determinación de posición virtual almacenado en el medio de almacenamiento según cualquiera de las reivindicaciones 1 a 10.
Patentes similares o relacionadas:
Procesamiento de datos, del 19 de Julio de 2017, de Sony Interactive Entertainment Europe Limited: Un medio de almacenamiento de disco compacto de audio que lleva datos dispuestos como una o más pistas de audio reproducibles como una señal […]
Interfaz gráfica de usuario para un sistema de juego, del 28 de Diciembre de 2016, de Supercell Oy: Método de control de una pluralidad de recursos en un entorno de juego, ejecutado mediante el uso de un dispositivo de pantalla táctil, […]
SISTEMA Y METODO DE MEDIOS, del 7 de Diciembre de 2010, de VIRTUALLY LIVE LTD: - Unidad de entorno de mundo virtual que puede hacerse funcionar para simular un evento real en directo en tiempo sustancialmente real, incluyendo la simulación: una […]
 DISPOSITIVO DE PROCESAMIENTO DE GRAFICOS, METODO DE PROCESAMIENTO DE GRAFICOS, MAQUINA DE JUEGOS Y MEDIO DE ALMACENAMIENTO, del 1 de Febrero de 2010, de SEGA ENTERPRISES, LTD.: Un dispositivo de procesamiento de imágenes para generar una imagen de segmentos de rejilla definidos de forma tridimensional dentro de un espacio […]
DISPOSITIVO DE PROCESAMIENTO DE GRAFICOS, METODO DE PROCESAMIENTO DE GRAFICOS, MAQUINA DE JUEGOS Y MEDIO DE ALMACENAMIENTO, del 1 de Febrero de 2010, de SEGA ENTERPRISES, LTD.: Un dispositivo de procesamiento de imágenes para generar una imagen de segmentos de rejilla definidos de forma tridimensional dentro de un espacio […]
 JUEGO QUE UTILIZA ONDAS CEREBRALES, del 3 de Diciembre de 2009, de INTERACTIVE PRODUCTLINE AB: Un juego que comprende: un sensor para medir las frecuencias de las ondas cerebrales de unos jugadores que toman parte en el juego; una unidad electrónica de […]
JUEGO QUE UTILIZA ONDAS CEREBRALES, del 3 de Diciembre de 2009, de INTERACTIVE PRODUCTLINE AB: Un juego que comprende: un sensor para medir las frecuencias de las ondas cerebrales de unos jugadores que toman parte en el juego; una unidad electrónica de […]
 PROCEDIMIENTO PARA LA ACTIVACION DE UNA UNIDAD DE CONTROL DISPUESTA EN UN ALOJAMIENTO, QUE ESTA PROTEGIDA FRENTE A UN ACCESO NO AUTORIZADO A DATOS, del 6 de Noviembre de 2009, de ADP GAUSELMANN GMBH: Procedimiento para la activación de una unidad de control, que está dispuesta en un alojamiento con protección frente a un acceso no autorizado a datos,
- en que la unidad de […]
PROCEDIMIENTO PARA LA ACTIVACION DE UNA UNIDAD DE CONTROL DISPUESTA EN UN ALOJAMIENTO, QUE ESTA PROTEGIDA FRENTE A UN ACCESO NO AUTORIZADO A DATOS, del 6 de Noviembre de 2009, de ADP GAUSELMANN GMBH: Procedimiento para la activación de una unidad de control, que está dispuesta en un alojamiento con protección frente a un acceso no autorizado a datos,
- en que la unidad de […]
DISPOSITIVO DE JUEGO., del 1 de Abril de 2007, de SEGA ENTERPRISES, LTD.: Un dispositivo de juego para conducir un objeto a lo largo de un trayecto provisto en un espacio virtual tridimensional de conformidad con operaciones […]
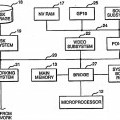 SISTEMA DE JUEGO ELECTRÓNICO DE CASINO CON MAYOR CAPACIDAD DE JUEGO, DE AUTENTICACIÓN Y DE SEGURIDAD, del 26 de Abril de 2011, de IGT: LA INVENCION SE REFIERE A UN SISTEMA DE JUEGO ELECTRONICO DE UN CASINO CONSISTENTE EN VARIOS COMPONENTES DEL SISTEMA, INCLUYENDO UN MICROPROCESADOR , UNA UNIDAD DE MEMORIA […]
SISTEMA DE JUEGO ELECTRÓNICO DE CASINO CON MAYOR CAPACIDAD DE JUEGO, DE AUTENTICACIÓN Y DE SEGURIDAD, del 26 de Abril de 2011, de IGT: LA INVENCION SE REFIERE A UN SISTEMA DE JUEGO ELECTRONICO DE UN CASINO CONSISTENTE EN VARIOS COMPONENTES DEL SISTEMA, INCLUYENDO UN MICROPROCESADOR , UNA UNIDAD DE MEMORIA […]