PROCEDIMIENTO Y DISPOSITIVO PARA LA DETECCION DE UNA COLISION CON UN PEATON.
Procedimiento para llevar a cabo la detección de una colisión con un peatón,
que comprende las etapas siguientes:
- la detección de una colisión con un peatón por medio de, al menos, una primera señal de un primer sistema sensor de la aceleración (BS1),
- la verificación de la funcionalidad del primer sistema sensor de la aceleración y/o de un segundo sistema sensor de la aceleración (BS1-BS4) por medio de una comparación de la primera señal y de una segunda señal del sistema sensor de la aceleración (BS2-BS4),
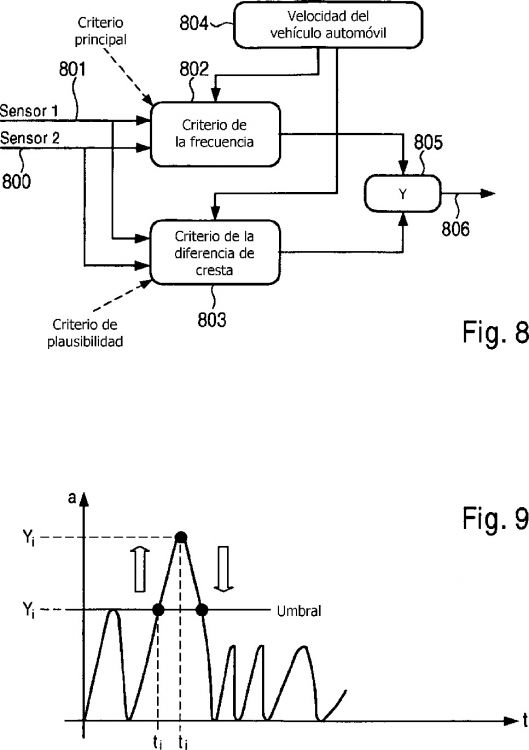
- la generación de una señal del activación en dependencia de la verificación, sometiéndose paralelamente a la primera señal y a la segunda señal a dos criterios: por un lado a un criterio de la frecuencia y, por otro lado, a un criterio de la diferencia de cresta, en el que
en el caso del criterio de la frecuencia, se emplea en cada caso, un número respectivo de cambios de signo de una primera diferencia entre los valores absolutos de los valores de medición de la primera señal y de la segunda señal, que son directamente sucesivos y que se encuentran por encima de un umbral de ruido, dentro de un primer intervalo de tiempo determinado, siendo un cociente entre el número que se produce de cambios de signo de los dos sensores, una magnitud que es comparada con un primer umbral empírico, con el fin de representar un criterio de decisión para el diagnóstico, y en el caso del criterio de la diferencia de cresta, se totalizan en cada caso las amplitudes de la primera señal y de la segunda señal, que se encuentran por encima de un umbral de ruido, dentro de un segundo intervalo de tiempo, para formar una primera suma y una segunda suma, y se determina una segunda diferencia a partir de la primera suma y de la segunda suma, después del segundo intervalo de tiempo y la segunda diferencia es comparada con un según umbral empírico determinado, con objeto de reconocer los errores
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06121163.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: C/IPE POSTFACH 30 02 20,70442 STUTTGART.
Inventor/es: MACK,FRANK, STEINKOGLER,SASCHA, KOCHER,PASCAL, WACKER,MANUEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 25 de Septiembre de 2006.
Fecha Concesión Europea: 10 de Febrero de 2010.
Clasificación Internacional de Patentes:
- B60R21/0132 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › en respuesta a parámetros sobre el movimiento del vehículo.
Clasificación PCT:
- B60R21/34 B60R 21/00 […] › Protección de no ocupantes del vehículo, p. ej. peatones.
- G01P15/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › Medida de la aceleración; Medida de la deceleración; Medida de los choques, es decir, de una variación brusca de la aceleración.
- G01P21/00 G01P […] › Ensayo o calibrado de aparatos o de dispositivos comprendidos en los otros grupos de esta subclase.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento y dispositivo para la detección de una colisión con un peatón.
Estado de la técnica
La invención se refiere a un dispositivo así como a un procedimiento para la detección de una colisión con un peatón del tipo correspondiente a la reivindicación independiente.
Se conoce ya por la publicación DE 10332702 A1 la utilización de sensores de aceleración como sensores de colisión para el reconocimiento de una colisión con un peatón.
Exposición de la invención
El procedimiento, de conformidad con la invención, que está destinado a llevar a cabo la detección de una colisión con un peatón y, respectivamente, el dispositivo de conformidad con la invención, que está destinado a llevar a cabo la detección de una colisión con un peatón tienen, por el contrario, la ventaja de que la funcionalidad del sistema sensor de la aceleración empleado para llevar a cabo el reconocimiento de una colisión con un peatón se consigue por medio de la comparación con señales de aceleración de diversos sistemas sensores de aceleración. En este caso es posible que los dos sistemas sensores de aceleración estén configurados para llevar a cabo la detección de una colisión con un peatón o que únicamente una de los mismos sea utilizado para llevar a cabo la detección de una colisión con un peatón y que el otro sea empleado como sistema sensor para el frente vertical o como sistema sensor para las colisiones laterales o como sistema sensor central. Este otro sistema sensor de la aceleración no está dispuesto entonces en la parte posterior del revestimiento del parachoques sino que lo está sobre un soporte más estable. De este modo, se produce una posibilidad de diagnóstico económica para el sistema sensor para la protección de los peatones. De manera especial, pueden ser reconocidos perfectamente los sensores sueltos con el procedimiento de conformidad con la invención y, respectivamente, con el dispositivo de conformidad con la invención.
Se conoce por la publicación DE 39 20 091 A1 llevar a cabo la comparación entre sí de las señales de dos sensores sensibles a la aceleración, en un equipo de seguridad para los ocupantes de un vehículo automóvil, para llevar a cabo la verificación de la funcionalidad de estos sensores. En este caso, se suman y, respectivamente, se integran las señales durante un intervalo de tiempo predeterminado y las sumas o bien los valores integrales se comparan entre sí una vez transcurrido el intervalo de tiempo que puede ser predeterminado. Cuando se sobrepasa de un valor límite, que puede ser predeterminado, por parte del valor de la comparación se pone en funcionamiento un equipo de alarma. Se conoce por la publicación DE 43 02 399 A1 llevar a cabo la comparación entre sí de las señales de salida de dos disposiciones idénticas de aceleración. Esta comparación se lleva a cabo porque se forman valores integrales de las señales de salida de los sensores, combinándose estos valores integrales con valores de corrección. Los valores integrales, que han sido integrados de este modo, se someten, a continuación, a la formación de una diferencia con objeto de obtener el valor de la diferencia D. Este valor de la diferencia D se compara con un valor de umbral F, que puede ser predeterminado. En función de esta comparación del valor de umbral se genera un aviso de error y, en caso dado, se advierte que las disposiciones de los sensores son defectuosas.
Cuando se utiliza un sistema sensor simétrico de la aceleración, es decir cuando un sensor de la aceleración se encuentra a la izquierda y el otro se encuentra a la derecha del eje central del vehículo automóvil, sobre el revestimiento del parachoques, se ha previsto de conformidad con la invención llevar a cabo una comparación de la señal del sensor izquierdo y de la señal del sensor derecho durante un funcionamiento normal sobre recorridos de mala calidad. De manera especial, un sensor suelto se mueve de una forma muy marcada sobre los recorridos de mala calidad y, por consiguiente, conduce a una señal oscilante. Sin embargo, cuando ambos sensores estén fijados correctamente, entonces las señales serán simétricas o bien serán similares entre sí dentro de una ventana de medición, que puede ser predeterminada, en cuanto a su forma y a su magnitud. Sin embargo, tan pronto como uno de los dos sensores se suelta o se presenta un deterioro asimétrico del parachoques, estas señales del recorrido de mala calidad presentan así mismo una asimetría. Esta asimetría puede ser empleada para llevar a cabo el diagnóstico del sistema para la protección de los peatones con objeto de provocar una reducción eventual de la funcionalidad de los peatones como consecuencia de que los sensores están sueltos, de fenómenos de envejecimiento o de deterioros del extremo frontal. En dependencia con la funcionalidad del sistema sensor de la aceleración se activa una indicación, preferentemente una lámpara de indicación, o pueden adaptarse incluso parámetros del algoritmo.
El núcleo del procedimiento, de conformidad con la invención, debe ser considerado en el hecho de que las señales, que deben ser comparadas, son comparadas en lo que se refiere a su respuesta en amplitud y a su trayectoria en el tiempo de la respuesta en amplitud. De este modo, se aprovecha la observación de que los sensores sueltos generan amplitudes mucho más elevadas que los sensores fijados correctamente en los recorridos de mala calidad y que incluso la trayectoria en el tiempo es diferente puesto que la frecuencia de la señal del sensor suelto es considerablemente mayor.
Con ayuda de las medidas y de los desarrollos, que han sido indicados en las reivindicaciones dependientes, son posibles mejoras ventajosas del dispositivo y respectivamente del procedimiento que han sido indicados en las reivindicaciones independientes para llevar a cabo la detección de una colisión con un peatón.
Es especialmente ventajoso que la funcionalidad del sistema sensor de la aceleración únicamente sea comprobada cuando la señal del sistema sensor de la aceleración sobrepase un umbral, que sea mayor que el umbral de ruido. Este umbral es mayor que el umbral de ruido puesto que este umbral debe detectar el golpeteo mecánico de un sistema sensor de la aceleración, que está suelto, y, con esta finalidad, se requieren mayores desviaciones de la señal de la aceleración. Por consiguiente, se presenta un valor mecánico del umbral de ruido. En dependencia de que se sobrepase este umbral es activado el algoritmo de la detección, es decir el procedimiento de conformidad con la invención.
El primer sistema sensor de la aceleración, que es comprobado aquí de manera ventajosa, está dispuesto por detrás del revestimiento del parachoques, puesto que éste es un lugar adecuado para detectar una colisión con un peatón. El segundo sistema sensor de la aceleración, cuya señal se toma en consideración con fines comparativos, puede estar dispuesto así mismo por detrás del revestimiento del parachoques como sistema sensor para la colisión con un peatón, sin embargo también es posible que esté configurado también como sistema sensor de frente vertical (UpFront), de sistema sensor periférico o como sistema sensor central. El sistema sensor de frente vertical (UpFront) está dispuesto en la mayoría de las ocasiones sobre la rejilla del radiador, es decir en un punto que ofrece un fondo más estable que para el sistema sensor para la protección de los peatones por detrás del revestimiento del parachoques. De igual modo, el sistema sensor periférico o el sistema sensor central están dispuestos en lugares más protegidos. El sistema sensor de la aceleración está constituido por uno o por varios sensores de la aceleración, que están orientados en una o en varias direcciones en el espacio. Los sensores de la aceleración propiamente dichos están configurados como sensores micromecánicos y miden por vía capacitiva el retardo o bien la aceleración que se presente.
De la misma manera, es ventajoso que la señal de activación lleve a cabo la activación de una indicación o de un algoritmo para la protección de los peatones en función de la comparación. Con esta indicación, por ejemplo una lámpara de indicación o con una pantalla de visualización sobre un aparato de navegación o sobre un ordenador de abordo, puede indicarse directamente el defecto del sensor suelto de tal manera, que origina una visita al taller de reparación. Sin embargo, también es posible ejercer, en este caso, un influjo sobre un algoritmo para la protección de los peatones. Cuando la comparación indique que está suelto un sensor de la aceleración, entonces se...
Reivindicaciones:
1. Procedimiento para llevar a cabo la detección de una colisión con un peatón, que comprende las etapas siguientes:
en el caso del criterio de la frecuencia, se emplea en cada caso, un número respectivo de cambios de signo de una primera diferencia entre los valores absolutos de los valores de medición de la primera señal y de la segunda señal, que son directamente sucesivos y que se encuentran por encima de un umbral de ruido, dentro de un primer intervalo de tiempo determinado, siendo un cociente entre el número que se produce de cambios de signo de los dos sensores, una magnitud que es comparada con un primer umbral empírico, con el fin de representar un criterio de decisión para el diagnóstico, y en el caso del criterio de la diferencia de cresta, se totalizan en cada caso las amplitudes de la primera señal y de la segunda señal, que se encuentran por encima de un umbral de ruido, dentro de un segundo intervalo de tiempo, para formar una primera suma y una segunda suma, y se determina una segunda diferencia a partir de la primera suma y de la segunda suma, después del segundo intervalo de tiempo y la segunda diferencia es comparada con un según umbral empírico determinado, con objeto de reconocer los errores.
2. Procedimiento según la reivindicación 1, caracterizado porque la verificación se lleva a cabo en función de que se sobrepase un valor de umbral (M) por parte de la primera señal, encontrándose el valor de umbral (M) por encima del umbral de ruido (R).
3. Procedimiento según la reivindicación 2, caracterizado porque la verificación se lleva a cabo de tal manera, que se efectúa una comparación de las veces que se sobrepase el valor de umbral (M) por parte de la primera señal y de la segunda señal, en una primera ventana de tiempo (?T).
4. Procedimiento según la reivindicación 1 o 2, caracterizado porque la verificación se lleva a cabo de tal manera, que se efectúa una comparación entre sí de la primera señal y de la segunda señal, respectivamente como señal de aceleración integrada o totalizada.
5. Procedimiento según la reivindicación 1 o 2, caracterizado porque la verificación se lleva a cabo de tal manera, que se efectúa una comparación de la primera señal y de la segunda señal con respecto a sus valores absolutos.
6. Procedimiento según la reivindicación 1 o 2, caracterizado porque la verificación se lleva a cabo de tal manera, que se lleva a cabo una filtración de la primera señal y de la segunda señal y la señales filtradas son comparadas entre sí.
7. Procedimiento según la reivindicación 1, caracterizado porque se toma en consideración, además, la velocidad del vehículo automóvil.
Patentes similares o relacionadas:
SISTEMA ELECTRÓNICO EMBEBIDO PARA LA DETECCIÓN DE INTENCIÓN DE FRENADO DE UN CONDUCTOR EN SITUACIONES DE EMERGENCIA, del 20 de Junio de 2019, de INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY: La invención se refiere a un sistema electrónico embebido para la detección de intención de frenado de un conductor en situaciones de emergencia, utilizando […]
Procedimiento para hacer funcionar un sistema de seguridad de un automóvil en caso de una colisión y automóvil, del 17 de Abril de 2019, de AUDI AG: Procedimiento para hacer funcionar un sistema de seguridad de un automóvil en caso de una colisión con un objeto de colisión, registrándose mediante […]
Método, aparato y programa informático para detectar una colisión utilizando datos de acelerómetro, del 7 de Marzo de 2019, de Redtail Telematics Limited: Un método para detectar una colisión usando un acelerómetro conectado a un vehículo; comprendiendo el método: recibir datos de aceleración del […]
Método y aparato para controlar un dispositivo de seguridad accionable, del 10 de Octubre de 2018, de TRW AUTOMOTIVE U.S. LLC: Un método para determinar una condición de colisión de un vehículo incluyendo los pasos de: detectar aceleración de colisión en una primera dirección sustancialmente […]
Dispositivo para la puesta a disposición de una característica de activación para la activación de un dispositivo de seguridad de un vehículo motorizado, del 30 de Mayo de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Dispositivo para la puesta a disposición de una característica de activación (12a, b) para una señal de activación que provoca una activación de un dispositivo […]
Procedimiento y aparato de control para controlar medios para la protección de personas para un vehículo, del 11 de Abril de 2018, de ROBERT BOSCH GMBH: Procedimiento para el control de medios para la protección de personas (PS) para un vehículo (FZ) en función de un proceso de vuelco que se detecta en función de variables de […]
Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor, del 9 de Agosto de 2017, de AUDI AG: Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor mediante - detección de un desarrollo […]
Sistema de protección contra colisión y/o de personas para un vehículo motorizado, del 20 de Julio de 2016, de AUDI AG: Sistema de protección contra choques y de personas , en particular sistema de protección para ocupantes o sistema de protección de peatones para un vehículo motorizado, […]