INSTALACION PARA FORMAR Y CARGAR GRUPOS DE PRODUCTOS ALIMENTICIOS SOBRE DISPOSITIVOS DE SUMINISTRO DE EMPAQUETADOR.
Instalación (1) para formar grupos (13) de productos (5) alimenticios previstos para empaquetarse que comprende un primer transportador (2) alimentado con una pluralidad de productos (5) alimenticios en una pluralidad de elementos (7) de recogida para recoger dichos productos (5) alimenticios individualmente desde dicho primer transportador (2) y transferirlos sobre al menos un segundo transportador (3a,
3b) para formar grupos (13) de dichos productos (5) alimenticios sobre el mismo, estando asociado dicho al menos un segundo transportador (3a, 3b) con una máquina (14) empaquetadora para empaquetar dichos grupos (13) de productos alimenticios, estando caracterizada la instalación porque comprende al menos un transportador (3c) adicional asociado con una máquina (14) empaquetadora y una unidad (18) de instrucciones y control para controlar el funcionamiento de al menos parte de dichos elementos (7) de recogida de modo que, en el caso de que la máquina (14) empaquetadora asociada con el segundo transportador (3a ó 3b) se bloquee, los productos (5) alimenticios previstos para la misma se recogen desde el primer transportador (2) y se transfieren sobre dicho al menos un transportador (3c) adicional para formar grupos (9) de productos (5) alimenticios sobre el mismo, teniendo dicho al menos un segundo transportador (3a, 3b) y dicho transportador (3c) adicional cada uno una pluralidad de elementos (11) de empuje que sobresalen por encima de los mismos, y que están dispuestos separados con una distancia predeterminada, definiendo cada par de elementos (11) de empuje consecutivos un espacio (12) en el que los productos (5) alimenticios individuales recogidos por dichos elementos (7) de recogida desde dicho primer transportador (2) están dispuestos para formar dichos grupos (13) de productos (5) alimenticios
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05425599.
Solicitante: BARILLA G.E.R. FRATELLI S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIALE RICCARDO E PIETRO BARILLA, 3/A,43100 PARMA.
Inventor/es: CANEPARI, LUCA, MARAZZI, GIORGIO.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Agosto de 2005.
Fecha Concesión Europea: 7 de Octubre de 2009.
Clasificación Internacional de Patentes:
- B65B35/38 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 35/00 Suministro, alimentación, disposición u orientación de artículos a ser empaquetados. › que funcionan por succión.
- B65B65/00B
Clasificación PCT:
- B65B35/38 B65B 35/00 […] › que funcionan por succión.
- B65B65/00 B65B […] › Partes constitutivas especiales de las máquinas de embalar, no previstos en otro lugar; Instalaciones de esas partes constitutivas.
- B65G43/08 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 43/00 Dispositivos de control, p. ej. de seguridad, de alarma, de corrección de errores. › Dispositivos de control accionados por la alimentación, el desplazamiento o la descarga de objetos o materiales.
- B65G47/68 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › adaptados para recibir los objetos que llegan de un transportador en una capa y para transferirlos en capas individuales a más de un transportador, o viceversa , p. ej. combinando el paso de objetos transportados por más de un transportador.
- B65G47/91 B65G 47/00 […] › que tienen pinzas neumáticas, p. ej. aspirantes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Instalación para formar y cargar grupos de productos alimenticios sobre dispositivos de suministro de empaquetador.
Campo de aplicación
En su aspecto más general, la presente invención se refiere al campo del empaquetado de productos alimenticios.
En particular, la presente invención se refiere a una instalación para formar y cargar grupos de productos alimenticios sobre dispositivos de suministro de máquinas empaquetadoras según el preámbulo de la reivindicación 1.
Técnica anterior
Como se conoce ampliamente en la industria alimentaria, los productos alimenticios obtenidos aleatoriamente desde unidades de producción de los mismos deben clasificarse en grupos de tamaño predeterminado de modo que pueden empaquetarse en máquinas empaquetadoras adecuadas, particularmente del tipo que usa la tecnología flow-pack.
Esta tecnología permite empaquetar rápidamente diversos productos, incluyendo productos alimenticios individuales o productos alimenticios clasificados en grupos, usando una hoja de material de plástico, que se enrolla alrededor del producto o los productos de un grupo y se termosella en las pestañas para formar una clase de paquete tubular que encierra el producto o los productos del grupo.
Por tanto, en la técnica anterior, se han equipado diferentes instalaciones con sistemas adecuados que se encargan de recoger los productos alimenticios individuales aleatoriamente y de formar grupos de tales productos, transportándose a continuación dichos grupos hacia una máquina empaquetadora para su empaquetado final.
Más específicamente, tales instalaciones comprenden generalmente un primer transportador, procedente normalmente de la unidad de producción, sobre el que se disponen los productos alimenticios aleatoriamente, una pluralidad de segundos transportadores, generalmente adyacentes al primer transportador, sobre los que los productos alimenticios se disponen en grupos y elementos de recogida que se disponen a lo largo de la dirección de desplazamiento del primer transportador a través de los que se recogen los productos alimenticios aleatorios individualmente desde el primer transportador y se disponen para formar grupos sobre los segundos transportadores.
Cada segundo transportador de la pluralidad de segundos transportadores está asociado con una máquina empaquetadora (particularmente del tipo flow-pack) en el que se empaquetan los grupos de productos alimenticios transportados por el mismo.
Las instalaciones anteriormente mencionadas también comprenden un sensor aguas arriba de los elementos de recogida a lo largo de la dirección de desplazamiento del primer transportador para detectar la orientación y la posición de los productos alimenticios individuales sobre el primer transportador y una unidad de instrucciones y control comunicada con el sensor y los elementos de recogida para controlar el funcionamiento de los elementos de recogida según los datos detectados por el sensor.
Una instalación del tipo anteriormente mencionado según el preámbulo de la reivindicación 1 se describe por ejemplo en la patente estadounidense n.º 5.186.599. Este documento describe una instalación en la que bizcochos en forma de disco dispuestos aleatoriamente sobre un primer transportador se recogen desde dicho primer transportador a través de elementos de recogida adecuados y se disponen para formar grupos de bizcochos apilados sobre segundos transportadores adyacentes al primer transportador para una parte del mismo.
En particular, cada grupo de bizcochos apilados está dispuesto en un espacio definido entre dos elementos de empuje consecutivos que se elevan verticalmente desde el plano de los segundos transportadores. El primer transportador y los segundos transportadores están realizados para desplazarse en la misma dirección de desplazamiento y, además, los segundos transportadores tienen una máquina empaquetadora asociada con los mismos hacia la que se transportan los grupos de bizcochos mediante los elementos de empuje para el empaquetado.
Aunque las instalaciones descritas anteriormente cumplen sustancialmente su fin, tienen el inconveniente importante de que, en el caso de que se bloquee una máquina empaquetadora, la capacidad de producción se reduce drásticamente, ya que los elementos de recogida pueden funcionar para la formación de los grupos de productos alimenticios sobre un menor número de transportadores, es decir, sobre los transportadores asociados con las máquinas empaquetadoras que aún están en funcionamiento.
El problema técnico en el que se basa la presente invención es el de proporcionar una instalación para formar grupos de productos alimenticios previstos para empaquetarse que supere los inconvenientes mencionados con referencia a la técnica anterior y en particular una instalación que pueda garantizar constantemente una capacidad de producción adecuada incluso en el caso de fallos por ejemplo en las máquinas empaquetadoras.
Sumario de la invención
Un problema técnico de este tipo se soluciona mediante una instalación para la formación de grupos de productos alimenticios según la reivindicación 1 y siguientes.
Las características y ventajas de la presente invención serán más evidentes en la siguiente descripción de algunas realizaciones preferidas, proporcionadas con fines indicativos y no limitativos con referencia a los dibujos adjuntos, en los que:
- la figura 1 muestra una vista en perspectiva de una instalación para formar grupos clasificados de productos alimenticios según una primera realización de la invención,
- la figura 2 muestra una vista en perspectiva de un detalle de la instalación de la figura 1,
- las figuras 3 y 4 muestran cada una, una vista en planta de un detalle de la instalación de la figura 1 en una configuración operativa respectiva,
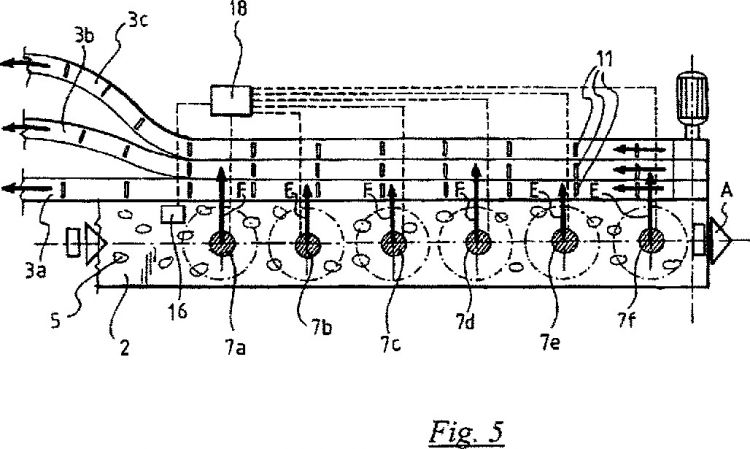
- la figura 5 muestra una vista en planta de un detalle de una instalación según una segunda realización de la invención.
Con referencia a las figuras 1-4, una instalación para formar grupos de productos alimenticios previstos para empaquetarse se indica de forma global con 1.
La instalación 1 comprende un primer transportador 2 que tiene una parte 2a que puede moverse a lo largo de una dirección de desplazamiento A y dos segundos transportadores 3a y 3b dispuestos respectivamente para una parte de extremo de la misma en lados opuestos de la parte 2a del primer transportador 2. En el ejemplo, los dos segundos transportadores 3a y 3b están dispuestos respectivamente en los flancos opuestos de la parte 2a del primer transportador 2.
La instalación 1 también comprende una pluralidad de elementos 7 de recogida soportados sobre un bastidor 20 y dispuestos en serie por encima de la parte 2a del primer transportador 2, a lo largo de su dirección de desplazamiento A, para definir un área 8 activa para agarrar productos 5 alimenticios desde el primer transportador 2. Tales productos 5 alimenticios, en el ejemplo una pluralidad de panecillos, proceden de una unidad para su producción (no mostrada) y se alimentan aleatoriamente sobre el primer transportador 2.
Los elementos 7 de recogida son per se convencionales. En particular, cada elemento 7 de recogida es del tipo que tiene uno o más brazos 9 robotizados que terminan en la parte inferior con una cabeza 10 de succión a la que se aplica un vacío o la aplicación del vacío se interrumpe para recoger productos 5 alimenticios individuales desde el primer transportador 2 y para disponer los productos 5 alimenticios recogidos sobre uno de los dos segundos transportadores 3a y 3b respectivamente. De manera alternativa, el uno o más brazos 9 robotizados pueden terminar con un elemento de agarre para llevar a cabo las mismas funciones indicadas anteriormente en lugar de con una cabeza 10 de succión. Ejemplos de elementos 7 de recogida que pueden usarse en la presente invención incluyen, sin limitación alguna, el robot Scara y el robot Delta.
En la presente invención, cada elemento 7 de recogida tiene un rango de acción correspondiente a una parte predeterminada del área 8 de recogida activa y puede moverse a lo largo de toda la dirección de la anchura del primer transportador 2.
Los segundos transportadores 3a y 3b tienen cada uno una pluralidad de elementos 11 de empuje que sobresalen de los mismos en la parte superior y están dispuestos separados con una distancia predeterminada. Cada par de elementos 11 de empuje consecutivos de un segundo transportador 3a ó 3b define...
Reivindicaciones:
1. Instalación (1) para formar grupos (13) de productos (5) alimenticios previstos para empaquetarse que comprende un primer transportador (2) alimentado con una pluralidad de productos (5) alimenticios en una pluralidad de elementos (7) de recogida para recoger dichos productos (5) alimenticios individualmente desde dicho primer transportador (2) y transferirlos sobre al menos un segundo transportador (3a, 3b) para formar grupos (13) de dichos productos (5) alimenticios sobre el mismo, estando asociado dicho al menos un segundo transportador (3a, 3b) con una máquina (14) empaquetadora para empaquetar dichos grupos (13) de productos alimenticios, estando caracterizada la instalación porque comprende al menos un transportador (3c) adicional asociado con una máquina (14) empaquetadora y una unidad (18) de instrucciones y control para controlar el funcionamiento de al menos parte de dichos elementos (7) de recogida de modo que, en el caso de que la máquina (14) empaquetadora asociada con el segundo transportador (3a ó 3b) se bloquee, los productos (5) alimenticios previstos para la misma se recogen desde el primer transportador (2) y se transfieren sobre dicho al menos un transportador (3c) adicional para formar grupos (9) de productos (5) alimenticios sobre el mismo, teniendo dicho al menos un segundo transportador (3a, 3b) y dicho transportador (3c) adicional cada uno una pluralidad de elementos (11) de empuje que sobresalen por encima de los mismos, y que están dispuestos separados con una distancia predeterminada, definiendo cada par de elementos (11) de empuje consecutivos un espacio (12) en el que los productos (5) alimenticios individuales recogidos por dichos elementos (7) de recogida desde dicho primer transportador (2) están dispuestos para formar dichos grupos (13) de productos (5) alimenticios.
2. Instalación según la reivindicación 1, caracterizada porque comprende dos segundos transportadores (3a, 3b) dispuestos respectivamente en lados opuestos de dicho primer transportador (2) y un transportador (3c) adicional.
3. Instalación según la reivindicación 2, caracterizada porque dicho transportador (3c) adicional está dispuesto al lado del primer transportador (2) en el lado de uno de dichos segundos transportadores (3a ó 3b).
4. Instalación según la reivindicación 1, caracterizada porque comprende dos segundos transportadores (3a, 3b) y un transportador (3c) adicional dispuestos en serie al lado del primer transportador (2) en el mismo lado.
5. Instalación según una cualquiera de las reivindicaciones 2 a 4, caracterizada porque dicho primer transportador (2) puede moverse a lo largo de una dirección de desplazamiento (A) y dichos dos segundos transportadores (3a, 3b) y dicho transportador (3c) adicional pueden moverse en dirección contraria con respecto al primer transportador (2).
6. Instalación según una cualquiera de las reivindicaciones anteriores, caracterizada porque dichos elementos (7) de recogida están dispuestos en serie por encima del primer transportador (2) a lo largo de su dirección de desplazamiento (A) para definir un área (8) activa para recoger dichos productos (5) alimenticios.
7. Instalación según la reivindicación 6, caracterizada porque comprende también al menos un dispositivo (16) de detección dispuesto a lo largo de la dirección de desplazamiento (A) del primer transportador (2) para detectar la posición y orientación de los productos (5) alimenticios individuales sobre el primer transportador (2), estando comunicada dicha unidad (18) de instrucciones y control con dicho al menos un dispositivo (16) de detección para controlar además el funcionamiento de los elementos (7) de recogida según los datos detectados por dicho al menos un dispositivo (16) de detección.
8. Instalación según la reivindicación 7, caracterizada porque comprende un dispositivo (16) de detección aguas arriba de los elementos (7) de recogida para detectar la posición y orientación de los productos (5) alimenticios individuales antes de su entrada en el área (8) de recogida activa de modo que los productos (5) alimenticios transportados por el primer transportador (5) y que entran en el área (8) activa se recogen por dichos elementos (7) de recogida y se disponen en los espacios (12) de un segundo transportador (3a, 3b) o de un transportador (3c) adicional.
9. Instalación según la reivindicación 8, caracterizada porque la velocidad de funcionamiento de los elementos (7) de recogida se controla además por la unidad (18) de instrucciones y control según la velocidad o tasa de flujo de los productos (5) alimenticios sobre el primer transportador (2) y/o el grado de saturación de los espacios (12) de los segundos transportadores (3a, 3b) o de un segundo transportador (3a ó 3b) y de un transportador (3c) adicional con los productos (5) alimenticios.
10. Instalación según la reivindicación 9, caracterizada porque a una velocidad o tasa de flujo predeterminada de los productos (5) alimenticios sobre el primer transportador (2), se controla la velocidad de funcionamiento de los elementos (7) de recogida y/o la velocidad de los segundos transportadores (3a, 3b) o la velocidad de un segundo transportador (3a ó 3b) y del transportador (3c) adicional de modo que no hay productos (5) alimenticios residuales sobre el primer transportador (2) saliendo de la parte del área (8) activa del elemento (7f) de recogida más aguas abajo en la dirección de desplazamiento del primer transportador (2) y para completar el llenado con los productos (5) alimenticios de los espacios (12) entre elementos (11) de empuje consecutivos que se alejan de la parte del área (8) activa del elemento (7a) de recogida más aguas arriba en la dirección de desplazamiento (A) del primer transportador (2).
11. Instalación según la reivindicación 9, caracterizada porque a una velocidad predeterminada de los segundos transportadores (3a, 3b) y del transportador (3c) adicional, se controla la velocidad de funcionamiento de los elementos (7) de recogida y la velocidad o tasa de flujo de los productos (5) alimenticios sobre el primer transportador (2) de modo que no hay productos (5) alimenticios residuales sobre el primer transportador (2) saliendo de la parte del área (8) activa del elemento (7f) de recogida más aguas abajo en la dirección de desplazamiento del primer transportador (2) y para completar el llenado con los productos (5) alimenticios de los espacios (12) entre elementos (11) de empuje consecutivos que se alejan de la parte del área (8) activa del elemento (7a) de recogida más aguas arriba en la dirección de desplazamiento (A) del primer transportador (2).
12. Instalación según la reivindicación 10 u 11, caracterizada porque se controla la velocidad de funcionamiento de los elementos (7) de recogida de modo que los elementos (7c, 7d, 7e, 7f) de recogida de la pluralidad de elementos de recogida más aguas abajo en la dirección de desplazamiento (A) del primer transportador (2) tienen una mayor velocidad que la velocidad de al menos un elemento (7a ó 7b) de recogida, preferiblemente una pluralidad de elementos (7a, 7b) de recogida más aguas arriba en la dirección de desplazamiento (A) del primer transportador (2).
Patentes similares o relacionadas:
MÁQUINA PARA EL POSICIONAMIENTO AUTOMÁTICO DE OBJETOS, del 19 de Marzo de 2020, de POSIMAT, SA: 1. Máquina para el posicionamiento automático de objetos, que comprende: - al menos un transportador de entrada configurado para transportar una pluralidad […]
Máquina encajadora de monodosis, del 11 de Marzo de 2020, de IMASDE EXTREMADURA S.L: La máquina encajadora de monodosis está diseñada para realizar el encajado de envases de tipo monodosis de distintos formatos en cajas vacías […]
Dispositivo de embalaje y sistema de clasificación para el embalaje direccional de productos y método para el mismo, del 18 de Diciembre de 2019, de DE GREEF'S WAGEN- CARROSSERIE- EN MACHINEBOUW B.V.: Dispositivo de embalaje para el embalaje direccional de productos (P), como verduras y frutas, que comprende: - un sistema de sensor que comprende: un sistema […]
Máquina de embalar, del 20 de Noviembre de 2019, de Mad Automation SRL: Máquina de embalar que comprende: - un transportador de entrada para transportar productos para su embalaje a lo largo de una dirección de desplazamiento […]
MÁQUINA ENCAJADORA DE ENVASES VERTICALMENTE INESTABLES Y PROCEDIMIENTO DE ENCAJADO DE ENVASES VERTICALMENTE INESTABLES, del 8 de Agosto de 2019, de TAVIL IND S.A.U: La presente invención se refiere a una máquina encajadora de envases verticalmente inestables que comprende unos medios de transporte de los […]
Conjunto y proceso para organizar pilas de tapones de corcho y máquina que comprende dicho conjunto, del 8 de Mayo de 2019, de Amorim Cork Research, Lda: Un conjunto para organizar pilas de tapones de corcho, que comprende: · una plataforma para organizar pilas de tapones de corcho que comprende una […]
DISPOSITIVO PARA MAQUINA ENCAJADORA DE FRUTA, del 10 de Abril de 2019, de ITEC MAQUINARIA, S.L: 1. Dispositivo para máquina encajadora de fruta capacitado para aspirar una capa de frutas y ser transferida al interior de una caja para su transporte y comercio, […]
Procedimiento y dispositivo para el tratamiento o procesamiento de recipientes para sustancias para aplicaciones médicas, farmacéuticas o cosméticas, del 30 de Noviembre de 2016, de SCHOTT AG: Procedimiento para el tratamiento o el procesamiento de recipientes , que sirven para la conservación de sustancias para aplicaciones médicas, […]