PROCEDIMIENTO PARA EL POSICIONADO AUTOMATICO DE JAMONES EN EL INTERIOR DE UN CONTENEDOR DE MANERA ORDENADA.
Procedimiento para el posicionado automático de jamones en el interior de un contenedor de manera ordenada.
Comprende una primera fase en la que se dispone un jamón (1) en una cinta transportadora (2), caracterizado porque comprende una segunda fase en la que unos medios de posicionado (3) dirigen al jamón (1) hacia un determinado punto deteniéndose la cinta transportadora (2) al alcanzar el referido jamón (1) dicho punto, y una tercera fase en la que un primer robot (4) atrapa el jamón (1), lo traslada desde el referido punto y lo dispone de una manera predeterminada y ordenada en el interior de un contenedor
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802714.
Solicitante: INDUSTRIES FAC, S.L..
Nacionalidad solicitante: España.
Provincia: GIRONA.
Inventor/es: CAMPOS ORTIZ,FRANCESC.
Fecha de Solicitud: 24 de Septiembre de 2008.
Fecha de Publicación: .
Fecha de Concesión: 12 de Enero de 2010.
Clasificación Internacional de Patentes:
- B65B5/10C
- B65G47/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › durante el transporte por un solo transportador.
Clasificación PCT:
- B65B5/10 B65 […] › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Llenado de receptáculos o recipientes, progresivamente o por etapas sucesivas, introduciendo sucesivamente los objetos o capas de objetos.
- B65G47/28 B65G 47/00 […] › durante el transporte por un solo transportador.
Fragmento de la descripción:
Procedimiento para el posicionado automático de jamones en el interior de un contenedor de manera ordenada.
Procedimiento para el posicionado automático de jamones en el interior de un contenedor de manera ordenada, del tipo que comprende una primera fase en la que se dispone un jamón en una cinta transportadora, y porque comprende una segunda fase en la que unos medios de posicionado dirigen al jamón hacia un determinado punto deteniéndose la cinta transportadora al alcanzar el referido jamón dicho punto, y una tercera fase en la que un primer robot atrapa el jamón, lo traslada desde el referido punto y lo dispone de una manera predeterminada y ordenada en el interior de un contenedor.
Antecedentes de la invención
El inventor y la firma solicitante son conocidos en el sector de la maquinaria para la manipulación de alimentos.
Así, la firma solicitante, en el año 1990, solicitó la Patente Española nº 9000792 (ES2022788), "Perfeccionamientos en las cubetas para el salado de jamones", que se refiere a unos perfeccionamientos en las cubetas para el salado de jamones. Consisten dichos perfeccionamientos en que la cubeta está inicialmente abierta por arriba y por abajo y porque a la misma se la dota de dos tapas idénticas independientes, separadas, con medios de cierre convencionales para vincularlas sólidamente al propio receptáculo y susceptibles de tapar por deslizamiento horizontal, respectivamente, primero el fondo del mismo para llenarlo con los jamones a salar y, al cabo de un cierto tiempo, tapar la boca superior para posteriormente poder girarlo al revés y los jamones aplastados que antes estaban en el fondo pasen a estar ahora en la parte superior.
También pertenece al estado de la técnica la Patente Española nº 0337869, del año 1967, a nombre de D. Agustín Martos Vela, que se refiere a un aparato para salar jamones, esencialmente constituido por un recipiente o bombo esférico, dotado de la correspondiente abertura, y cuya superficie interna está erizada de púas irregularmente dispuestas, apoyadas sobre cojinetes situados en polos opuestos del mismo y conectado a una cámara lateral de evacuación de fluidos, a la que está empalmada la aspiración de la correspondiente bomba de vaciado, siendo el conjunto susceptible de girar a velocidad variable, impulsado por el adecuado motor de accionamiento y variador de velocidades.
Por último, también pertenece al mismo sector de la técnica la Patente Española nº 200601953 (ES2301374), del año 2006, a nombre de JAMONES CASEROS AGAPITO, S.L., que se refiere a una instalación para el salado de jamones, que estando prevista para su ubicación en el interior de una cámara de refrigeración, se caracteriza porque comprende un depósito superior de almacenamiento de sal en cuyo fondo se ha previsto un sinfín con doble sentido de giro para evitar el apelmazamiento de la sal en el interior de dicho depósito, bajo el cual se ha previsto una cámara destinada a ser llenada de jamones con sal para salazón de éstos, y bajo dicha cámara una fosa inferior separada de la cámara por medio de una rejilla, incorporando en el fondo de dicha fosa inferior un sinfín para el arrastre de la sal en el vaciado del sistema, hacia una abertura o ventana a través de la cual la sal accede a un sistema de arrastre constituido por un tubo cerrado en cuyo interior discurre una sirga con una pluralidad de discos que arrastran la sal hasta un tramo superior de dicho tubo, donde existen unas válvulas programadas de vaciado de la sal para el llenado del depósito superior de almacenamiento de sal.
Breve descripción de la invención
La presente invención es una mejora en el sector de la manipulación y almacenaje de alimentos, ya que permite un aumento de la productividad como consecuencia de la automatización de los elementos.
Así, tradicionalmente se necesitaban al menos dos operarios que cargaban los jamones y los disponían de manera ordenada en el interior de los contenedores. Además, dependiendo de la modalidad, tenían que bien añadir sal o colocar una plancha, por lo que la carga de jamones se paralizaba.
Este trabajo no dejaba de ser un tema candente en temas de salud laboral, ya que ocasionaba continuas lesiones en los manipuladores.
Por tanto, era preciso en dicho sector industrial un procedimiento que automatizase las fases, de tal manera que permitiera reducir los problemas de salud laboral, aumentase la rapidez en la manipulación de los jamones y al propio tiempo supusiese un gran rendimiento económico.
Dicha automatización se consigue, en primer lugar, logrando detener el jamón en un punto exacto, teniendo en cuenta que el mismo viene a través de una cinta transportadora y que es descargado sin tener en cuenta su posición en la cinta, por lo que unos medios de posicionado (desviadores) deben dirigir el jamón hacia dicho punto, y que una vez alcance el jamón ese punto, la cinta transportadora se pare.
En segundo lugar, la automatización se obtiene al sustituir dos empleados por un robot que coge el jamón y lo dispone de manera ordenada en el interior del contenedor.
Es un objeto de la presente invención un procedimiento para el posicionado automático de jamones en el interior de un contenedor de manera ordenada, del tipo que comprende una primera fase en la que se dispone un jamón en una cinta transportadora, caracterizado porque comprende una segunda fase en la que unos medios de posicionado dirigen al jamón hacia un determinado punto deteniéndose la cinta transportadora al alcanzar el referido jamón dicho punto, y una tercera fase en la que un primer robot atrapa el jamón, lo traslada desde el referido punto y lo dispone de una manera predeterminada y ordenada en el interior de un contenedor.
Breve descripción de los dibujos
Con el fin de facilitar la explicación se acompañan a la presente memoria de tres láminas de dibujos en las que se han representado un caso práctico de realización, el cual se cita a título de ejemplo, no limitativo del alcance de la presente invención:
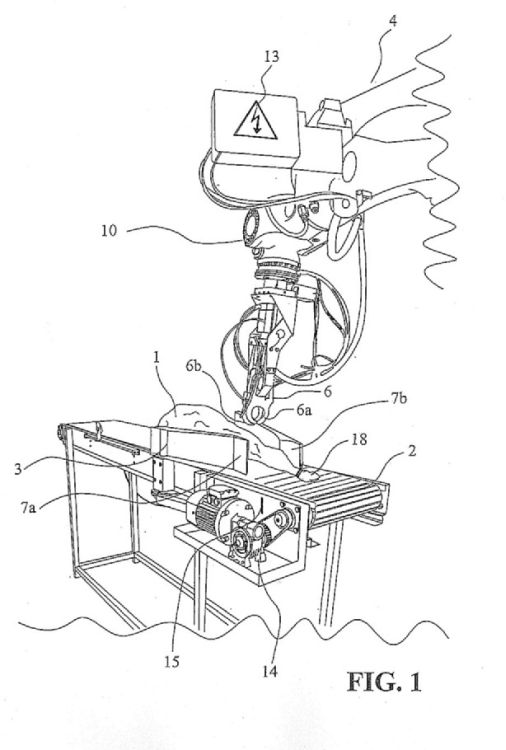
- La figura 1 es una vista de la cinta transportadora y el robot,
- La figura 2 es una vista frontal del brazo del robot, y
- La figura 3 es una vista lateral de los contenedores y la tolva.
Concreta realización de la presente invención
Así en la figura 1 se ilustra un primer robot 4 con sus medios de accionamiento 13, un brazo móvil 10, con sus pinzas 6 y sus dedos pequeños 6a y dedos pequeños 6b, un jamón 1 y su pezuña 18, una cinta transportadora 2, unos medios de posicionado 3 ó desviadores con sus extremos 7a, 7b, una marca 15 del punto de detención de la cinta transportadora con el jamón y unos medios de accionamiento 14 de la cinta transportadora.
En la figura 2 se ha representado el brazo móvil 10, los dedos pequeños 6a y los dedos grandes 6b y unos medios de fijación 11 o ventosas.
Por último, en la figura 3 se han dibujado unos contenedores 5, una tolva 9, un dispensador 12 con unas guías 16 para el desplazamiento vertical 16 y unas guías 8 para el desplazamiento horizontal del dispensador.
De este modo, en una concreta realización, se ponen en funcionamiento tanto la cinta transportadora 2 por medio de sus medios de accionamiento 14 así como el primer robot 4 por medio de sus medios de accionamiento 13.
En una primera fase se dispone sobre la cinta transportadora 2 un jamón 1 (fig. 1).
En una segunda fase unos medios de posicionado 3, unos desviadores en esta realización, dirigen al jamón 1 mientras avanza encima de la cinta transportadora 2, hacia un determinado punto de la cinta transportadora (predeterminado por el programa que gestiona el procedimiento). Cuando el jamón 1 llega al señalado punto se detiene la cinta transportadora 2.
Los medios de posicionado 3 de la segunda fase son unas guías laterales, inclinadas, que se van cerrando las dos a la vez sobre uno de sus extremos 12a,12b, forzando al jamón a seguir una dirección o ruta predeterminada hasta que se detiene la cinta transportadora 2.
A efectos orientativos y aclarativos se ha hecho una marca 15 en el chasis de la cinta transportadora 2, aun cuando dicha marca 15 no es necesaria ni tiene porqué estar marcada para el correcto funcionamiento del procedimiento.
En una tercera fase, el primer robot 4 atrapa el jamón 1, lo traslada desde el referido punto y lo dispone de una manera predeterminada y ordenada en el interior de un contenedor 5.
Como se puede apreciar en la figura 3,...
Reivindicaciones:
1. Procedimiento para el posicionado automático de jamones en el interior de un contenedor de manera ordenada, del tipo que comprende:
caracterizado porque comprende:
2. Procedimiento de acuerdo con la reivindicación 1 caracterizado porque el primer robot (4) de la tercera fase comprende unas pinzas (6), dispuestas sobre un brazo móvil (10), con al menos dos dedos por lado (6a, 6b), en donde los dos dedos (6a) más próximos a la pezuña (18) del jamón, uno por lado, son más pequeños que el resto de dedos (6b).
3. Procedimiento de acuerdo con la reivindicación 2 caracterizado porque comprende unos medios de fijación (11) para fijarse a unas planchas o separadores, posteriormente moverlas y disponerlas por encima de un piso o fila completa de unos jamones (1) dispuestos dentro del contenedor (5), situados dichos medios de fijación (11) en el brazo móvil (10).
4. Procedimiento de acuerdo con la reivindicación 3 caracterizado porque los medios de fijación (11) son unas ventosas.
5. Procedimiento de acuerdo con la reivindicación 1 caracterizado porque comprende una tolva (9) con sal que distribuye de manera uniforme dicho producto por encima de los jamones (1) ya dispuestos en el contenedor (5) mientras se desarrolla la primera y la segunda fase.
6. Procedimiento de acuerdo con la reivindicación 1 caracterizado porque comprende un segundo robot, con unos medios de fijación (11) para fijarse a unas planchas o separadores, posteriormente moverlas y disponerlas por encima de un piso o fila completa de unos jamones (1) dispuestos dentro del referido contenedor (5).
7. Procedimiento de acuerdo con la reivindicación 6 caracterizado porque los medios de fijación (11) del segundo robot son unas ventosas.
8. Procedimiento de acuerdo con la reivindicación 1 caracterizado porque los medios de posicionado (3) de la segunda fase son unas guías laterales, inclinadas, que se cierran las dos a la vez sobre uno de sus extremos (12a, 12b).
Patentes similares o relacionadas:
Sistema y método para transportar recipientes de muestras, del 25 de Diciembre de 2019, de BECKMAN COULTER, INC.: Sistema para transportar recipientes de muestras que comprende: una unidad de gestor que comprende una zona de distribución y uno o más […]
MECANISMO POSICIONADOR SIMULTÁNEO DE MÚLTIPLES PLATINAS GUÍA PARA EL ENCARRILADO DE OBJETOS EN CINTAS TRANSPORTADORAS, del 18 de Julio de 2019, de INDUSTRIAS ELECTROMECANICAS ACUÑA LTDA: Mecanismo posicionador simultáneo de múltiples platinas guía para el encarrilado de objetos en cintas transportadoras que comprende: - Unos rodillos con ejes internos unidos […]
Sistema de centrífuga y flujo de trabajo, del 27 de Marzo de 2019, de BECKMAN COULTER, INC.: Método para procesar muestras médicas en un sistema de laboratorio médico analítico que comprende: transportar mediante un elemento de […]
Disposición de transporte automático inteligente para fabricación de embalajes, del 19 de Octubre de 2018, de TRESU A/S: Un aparato para fabricar embalajes, que comprende: - una apiladora configurada para apilar piezas de trabajo planas en pilas (202, 204, 205, 301, 302, 303, […]
Dispositivo y procedimiento para transferir recipientes a una máquina procesadora, del 1 de Noviembre de 2017, de Groninger GmbH&Co. KG: Sistema con una máquina procesadora para el tratamiento cíclico de un grupo de recipientes , y un dispositivo para transferir recipientes a […]
 Sistema para la separación y transferencia de objetos entre estaciones operativas, del 24 de Junio de 2015, de SMI S.P.A.: Un sistema para la separación y transferencia de objetos que avanzan en procesión sobre unos medios de transporte a lo largo de una pista (11, […]
Sistema para la separación y transferencia de objetos entre estaciones operativas, del 24 de Junio de 2015, de SMI S.P.A.: Un sistema para la separación y transferencia de objetos que avanzan en procesión sobre unos medios de transporte a lo largo de una pista (11, […]
Transportador de rodillos y cinta para acumular y desplazar artículos lateralmente a lo largo del transportador, del 7 de Enero de 2015, de LAITRAM, LLC: Un procedimiento para mover lateralmente artículos (A, B, C) acumulados, que comprende: hacer avanzar artículos sobre rodillos de soporte de artículos […]
 Transportador de rodillos y cinta para acumular y desplazar artículos lateralmente a lo largo del transportador, del 27 de Agosto de 2014, de LAITRAM, LLC: Un procedimiento de formación de una capa de palé, que comprende:
hacer avanzar artículos (D; E; F; G) consecutivos a lo largo de un primer […]
Transportador de rodillos y cinta para acumular y desplazar artículos lateralmente a lo largo del transportador, del 27 de Agosto de 2014, de LAITRAM, LLC: Un procedimiento de formación de una capa de palé, que comprende:
hacer avanzar artículos (D; E; F; G) consecutivos a lo largo de un primer […]