PROCEDIMIENTO Y DISPOSITIVO DE DETECCION HIPERAGUDA DE UN BORDE DE CONTRASTE SENSIBLEMENTE RECTILINEO Y SISTEMA DE FIJACION Y SEGUIMIENTO FINO DE DICHO BORDE DE CONTRASTE.
Dispositivo para detectar un borde de contraste (E) que tiene una zona de transición de la luz substancialmente rectilínea en una dirección especificada,
comprendiendo dicho dispositivo:
por lo menos un primer y un segundo sensor óptico (D1, D2, O11, O12, O22, O31, O32) que tiene un ángulo visual global (?f) delimitado por la dirección promedio (O1OY1, O2OY2) de observación de dicho primer y dicho segundo sensor óptico, y
- una lente (L) que tiene un centro óptico (O), estando colocados el primer y segundo sensor óptico substancialmente en el plano focal de imagen de esta lente y las direcciones promedio (O1OY1, O2OY2) de observación del primer y del segundo sensor óptico corresponden substancialmente con una línea que conecta respectivamente el centro del primer y de segundo sensor óptico y el centro óptico (O) de esta lente, suministrando dichos primer y segundo sensores ópticos señales de detección, y
- medios (2) para medir, sobre la base de estas señales de detección, la diferencia de tiempo entre las señales vinculadas a la posición angular de la zona de transición de la luz en relación con una dirección de referencia en este ángulo visual global (?f) sobre la base de la ley de escaneado, estando vinculada esta dirección de referencia con un valor específico de esta diferencia de tiempo,
caracterizado por el hecho de que dicho dispositivo también comprende:
- medios para el movimiento de traslación relativo (1, A; A1, A2) de la unidad formada por el primer y segundo sensor óptico en relación con la lente (L), o de la lente (L) frente de la unidad formada por el primer y el segundo sensor óptico (D1, D2) en una dirección diferente (S) transversal a esta dirección especificada según un escaneado de posición periódico del ángulo visual global (?f) según una ley de escaneado periódico no uniforme durante por lo menos parte de cada periodo de escaneado periódico
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2005/000643.
Solicitante: CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS).
Nacionalidad solicitante: Francia.
Dirección: 3, RUE MICHEL ANGE,75016 PARIS.
Inventor/es: FRANCESCHINI,NICOLAS, VIOLLET,STEPHANE, BOYRON,MARC.
Fecha de Publicación: .
Fecha Concesión Europea: 19 de Mayo de 2010.
Clasificación Internacional de Patentes:
- G01B11/02F
Clasificación PCT:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G01B11/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
Clasificación antigua:
Fragmento de la descripción:
Procedimiento y dispositivo de detección hiperaguda de un borde de contraste sensiblemente rectilíneo y sistema de fijación y seguimiento fino de dicho borde de contraste.
La invención se refiere a un procedimiento y a un dispositivo para la detección óptica hiperaguda de tipo de un borde de contraste sustancialmente rectilíneo y a un sistema de adquisición y el seguimiento de un objetivo que comprende al menos un borde de contraste.
En el campo técnico de las imágenes, una solución para la obtención de un sensor de imágenes de muy alta resolución que implica asociar un sensor que tiene una alta densidad de píxeles con un sistema óptico adecuado. Además del volumen significativo, esta solución es muy costosa.
Otra solución consiste en desplazar un sensor de imagen mediante micro-etapas de desplazamiento, que son sub-múltiplos de la distancia entre sus píxeles, y reconstituir una imagen final sobre la base de las imágenes parciales adquiridas en cada micro-desplazamiento. Una solución de este tipo implica el uso de una memoria de almacenamiento de gran capacidad, así como un algoritmo de reconstrucción de la imagen que sea particularmente potente, y por lo tanto costoso en tiempo y recursos informáticos.
En el campo de la técnica correspondiente relativo a la detección del horizonte de pilotaje automático y estabilización de un buque o una aeronave, se han propuesto procedimientos de detección óptica, además de los procedimientos que utilizan sistemas inerciales. Los procedimientos mencionados de detección óptica básicamente consisten en medir una diferencia en la intensidad de la radiación infrarroja y/o visible entre el cielo y la tierra.
También se han propuesto otros sistemas experimentales. Este tipo de sistema utiliza un sensor CCD y un algoritmo de procesamiento de imágenes, para extraer el horizonte del mismo con una precisión adecuada. Sin embargo, un sistema de este tipo requiere una alta luminancia y una considerable capacidad de procesamiento.
La detección mediante ondas electromagnéticas u ondas de radar se utiliza para la detección de obstáculos tales como cables de acero y objetos de pequeño tamaño a una distancia relativamente grande.
Los radares de ondas milimétricas son capaces de detectar un cable de acero de 6 mm de diámetro a una distancia de unos 25 m, y los sistemas de radar de banda ultra ancha son capaces de detectar un cable de acero del mismo diámetro a una distancia de unos 80 m.
En el mismo campo, un cable con un diámetro similar se puede detectar hasta una distancia limitada a 6 metros, sin embargo, mediante procedimientos que emplean un láser de escaneado. Los correspondientes detectores de escaneado de tipo láser son voluminosos y pesados, con un peso 6 a 8 kg.
Más recientemente, un procedimiento de detección con un ojo electrónico sometido a las micro escaneado, que gira respecto a un borde de contraste sustancialmente rectilíneo fue descrito por Stéphane Viollet y Nicolas Franceschini, Equipe UMR Microrobotique et Mouvement Perception, CNRS/Université de la Méditerranée 31, Chemin Joseph Aiguier 13402 Marseille Cedex 20, durante el quinto taller de polo microrobótico y el primer taller de RTP microrobótico del 6 y 7 de noviembre de 2002 en Rennes, Irisa y ENS Cachan, Antenne de Bretagne, Francia.
El artículo publicado resultante de estos talleres y designado A1, describe el diseño y la producción de un tipo específico de sensor visual conocido como sensor visual "neuromimético", cuyas leyes operativas están directamente inspiradas en el mundo de los vivos. Este sensor, conocido como OSCAR, para escáner óptico para el control de robots autónomos, permite la posición angular de un contraste que tiene un borde substancialmente rectilíneo que se determinará mediante dos fotodiodos espacialmente desplazados, en los que se impone micro escaneado rotativo periódico inspirado mediante observaciones de la retina de una mosca en vuelo.
La medición del movimiento relativo del entorno visual, es decir, del borde sustancialmente rectilíneo, se realiza utilizando un circuito detector de movimiento elemental, circuito DEM, cuyo uso y leyes operativas se inspiran en las neuronas de detección del movimiento de una mosca.
Para un escaneado de rotación a velocidad variable, la señal enviada por el circuito DEM desde los dos fotodiodos es una señal cuya amplitud depende de la posición angular del borde de contraste respecto a la dirección media del campo de visión total del sensor formado por los dos fotodiodos.
Para una descripción más completa de este sensor OSCAR, debe hacerse referencia al artículo publicado A1 correspondiente a estos dos talleres.
Con referencia a este artículo, se menciona que este sensor OSCAR permite la producción, en particular, de:
- una agudeza mucho más fina que el ángulo ?
- un mínimo visible que es mucho más fino que este ángulo ?
Un sensor de este tipo tiene la capacidad suficiente de agudeza visual para permitir la integración del mismo en un bucle de control viso-motor servo, variando la ganancia estática del sensor también mínimamente de acuerdo con la naturaleza del objeto, su contraste o su distancia.
La presente invención se refiere a la aplicación de un procedimiento y un dispositivo para la detección de tipo hiperagudo de cambio de un borde de contraste sustancialmente rectilíneo, que se basan en una ley similar, pero que mediante los cuales el volumen y también la masa, la inercia y la potencia consumida del dispositivo de detección se reducen substancialmente en comparación con el sensor OSCAR del estado de la técnica, y que permite mejorar de una manera particularmente significativa la fiabilidad, en el sentido de la capacidad de repetición de la operación de escaneado, del dispositivo de detección de tipo hiperagudo de acuerdo con la invención.
La presente invención se refiere también a la aplicación de un sistema para la fijación y seguimiento fino de un objetivo que comprende al menos un borde de contraste, que tiene una zona de transición de luz substancialmente rectilínea para la monitorización y la estabilización de la dirección de observación de un dispositivo de detección de tipo hiperagudo de acuerdo con el objeto de la invención, siendo la capacidad de este sistema comparable, al menos cualitativamente, a la del proceso VOR (reflejo de vestíbulo ocular), que se conoce que estabiliza el ojo y, por lo tanto, la línea de la vista humana, debido a la combinación, por una parte, del procedimiento de detección de tipo hiperagudo de acuerdo con la invención y, por otra parte, del control particularmente rápido inspirado en el proceso VOR mencionado anteriormente.
La presente invención se refiere por último a cualquier aplicación del procedimiento y del dispositivo para la detección de un borde de contraste de acuerdo con la invención y del sistema para la fijación y el seguimiento fino de un objetivo, en particular,
- la detección y la localización del horizonte para estabilizar un avión, una nave espacial, una nave marina o un aparato aéreo;
- la detección de cables, postes, rieles y otros obstáculos delgados o filiformes mediante un avión u otro vehículo;
- la ayuda a la estabilización y/o la navegación de una máquina voladora, tal como un helicóptero dirigido o dirigido de forma remota en un área confinada;
- la ayuda al mantenimiento de líneas eléctricas de alta tensión, líneas telefónicas o similares, mediante el uso de un aparato aéreo dirigido o dirigido de forma remota mediante un bucle viso-motor de alta precisión y de alta estabilidad;
- la estabilización, mediante detección óptica de un avión que está en vuelo libre o cautivo respecto a un blanco estacionario colocado en el suelo;
- la estabilización de una plataforma con relación a marcadores ópticos fijos (soportes de instrumentos o máquinas, plataformas marinas o similares);
Reivindicaciones:
1. Dispositivo para detectar un borde de contraste (E) que tiene una zona de transición de la luz substancialmente rectilínea en una dirección especificada, comprendiendo dicho dispositivo:
por lo menos un primer y un segundo sensor óptico (D1, D2, O11, O12, O22, O31, O32) que tiene un ángulo visual global (?
- una lente (L) que tiene un centro óptico (O), estando colocados el primer y segundo sensor óptico substancialmente en el plano focal de imagen de esta lente y las direcciones promedio (O1OY1, O2OY2) de observación del primer y del segundo sensor óptico corresponden substancialmente con una línea que conecta respectivamente el centro del primer y de segundo sensor óptico y el centro óptico (O) de esta lente, suministrando dichos primer y segundo sensores ópticos señales de detección, y
- medios (2) para medir, sobre la base de estas señales de detección, la diferencia de tiempo entre las señales vinculadas a la posición angular de la zona de transición de la luz en relación con una dirección de referencia en este ángulo visual global (?
caracterizado por el hecho de que dicho dispositivo también comprende:
- medios para el movimiento de traslación relativo (1, A; A1, A2) de la unidad formada por el primer y segundo sensor óptico en relación con la lente (L), o de la lente (L) frente de la unidad formada por el primer y el segundo sensor óptico (D1, D2) en una dirección diferente (S) transversal a esta dirección especificada según un escaneado de posición periódico del ángulo visual global (?
2. Dispositivo según la reivindicación 1, caracterizado por el hecho de que el primer y el segundo sensores ópticos (D1, D2) están cada uno formado por un sensor fotoeléctrico.
3. Dispositivo según la reivindicación 1 ó 2, caracterizado por el hecho de que dichos medios (1, A; A1, A2) para el movimiento de traslación relativo comprenden, estando dicha lente (L) fija:
- un elemento de soporte deformable (A) integrado, por un lado, en dicha unidad formada por el primer y el segundo sensor óptico (D1, D2), y por otro lado en un soporte mecánico de referencia fijo;
- medios para aplicar, a dicho soporte deformable, una fuerza de control de movimiento periódico haciendo posible llevar un movimiento de traslación periódico en esta otra dirección transversal (S) de la unidad formada por el primer y el segundo sensores ópticos (D1, D2) según dicha ley de escaneado en relación con dicho soporte mecánico de referencia fijo;
- medios para medir la posición lineal del primer y el segundo sensor óptico o de la lente sobre la base de la deformación del soporte deformable.
4. Dispositivo según la reivindicación 1 ó 2, caracterizado por el hecho de que dichos medios para el movimiento de traslación relativo comprenden, estando dicha unidad formada por el primer y el segundo sensor óptico (D1, D2) fija:
- un elemento de soporte deformable integrado, por un lado, en esta lente (L) y, por otro lado, en un soporte mecánico de referencia fijo;
- medios para aplicar, a este elemento de soporte, una fuerza de control de movimiento periódico que hace posible llevar un movimiento de traslación periódico en esta otra dirección de dicha lente, según dicha ley de escaneado, en relación con dicho soporte mecánico de referencia fijo.
5. Dispositivo según la reivindicación 3 ó 4, caracterizado por el hecho de que dichos medios para aplicar una fuerza de control de movimiento comprenden al menos:
- un generador de escaneado (10) que suministra una tensión de escaneado;
- un circuito de formación (11) que recibe la tensión de escaneado y suministra una señal de control de escaneado intermedia, según la ley de escaneado no uniforme;
- un circuito de amplificación (12), alimentado con una tensión continua, controlado mediante dicha señal de escaneado intermedia, y que suministra una tensión de control de movimiento periódica;
- un accionador electromecánico (A, A1, A2) sensible a la tensión de control periódica.
6. Dispositivo según cualquiera de las reivindicaciones 1 a 5, caracterizado por el hecho de que dichos medios para medir la posición angular de la zona de transición de la luz comprenden al menos:
- un amplificador de separación (20) que recibe las señales suministradas por el primer y el segundo sensor óptico y señales amplificadas de suministro;
- un módulo detector de movimiento elemental (21) que recibe dichas señales amplificadas, haciendo posible, sobre la base de dicho retardo del tiempo y la ley de escaneado no uniforme, suministrar una señal de función substancialmente lineal de la posición angular de dicha zona de contraste de la luz en relación con dicha dirección de referencia.
7. Dispositivo según cualquiera de las reivindicaciones 1 a 6, caracterizado por el hecho de que la dirección especificada y la otra dirección transversal (S) a dicha dirección especificada son ortogonales.
8. Dispositivo según cualquiera de las reivindicaciones 1 a 7, caracterizado por el hecho de que este último también comprende medios (µM; CC) para orientar el conjunto formado por el elemento de soporte deformable, la lente o el conjunto del primer y segundo sensor óptico y el soporte mecánico de referencia fijo, tal como para orientar la dirección del movimiento de traslación periódico de la lente o del conjunto del sensor óptico en esta otra dirección transversal a dicha dirección especificada de la zona de transición de la luz substancialmente rectilínea.
9. Dispositivo según cualquiera de las reivindicaciones 1 a 8, caracterizado por el hecho de que el primer y el segundo sensores ópticos están formados por una matriz rectangular de fotodiodos y por el hecho de que los medios para el movimiento relativo del primer y el segundo dispositivo de detección y para su dirección de movimiento relativo periódico están formados por:
- un marco substancialmente rectangular (F);
- medios (38) para unir elásticamente la matriz de fotodiodos con el marco; y
- medios electromecánicos (A1, A2) que hacen posible transformar el movimiento periódico de manera alternativa de la matriz de fotodiodos o de la lente en una primera y una segunda dirección perpendicular al marco.
10. Dispositivo según cualquiera de las reivindicaciones 1 a 9, caracterizado por el hecho de que este último comprende una pluralidad de dispositivos elementales según cualquiera de las reivindicaciones 1 a 8, comprendiendo cada dispositivo elemental una lente fija (L1, L2, L3) que está dispuesta substancialmente sobre una superficie esférica que comprende un centro común, constituyendo el centro común, para dicho dispositivo, el centro óptico de un ángulo visual global ampliado a todos los ángulos visuales globales de cada uno de los dispositivos elementales tomados juntos.
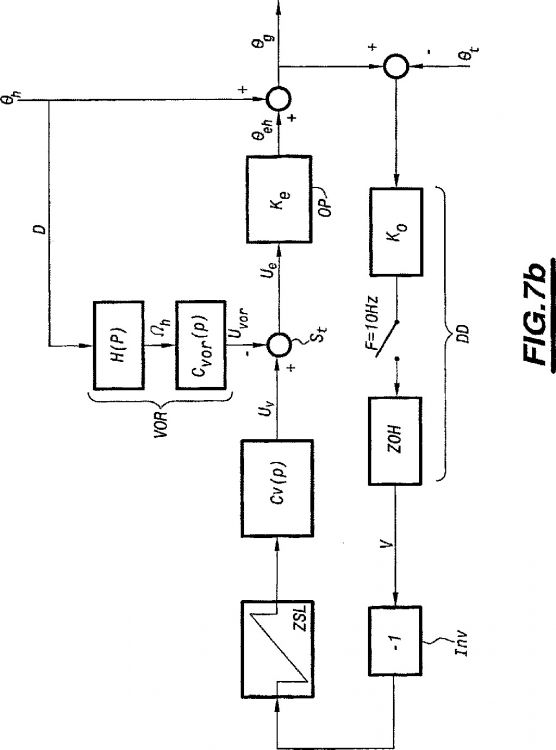
11. Sistema para la fijación visual y el seguimiento fino de un objetivo que comprende por lo menos un borde de contraste que tiene una zona de transición de la luz substancialmente rectilínea en una dirección especificada que forma este borde de contraste, caracterizado por el hecho de que comprende por lo menos:
- un dispositivo de detección (DD) según cualquiera de las reivindicaciones 1 a 10;
- un soporte mecánico (ET) en el que dicho dispositivo de detección es capaz de orientarse;
- unos medios H(p) para medir la velocidad de rotación de dicho soporte mecánico (ET);
- unos medios de control directos, en bucle abierto, para orientar la dirección de referencia de dicho dispositivo de detección, suministrando estos medios de control una señal de control directa (UVOR) sobre la base de la medición de la velocidad de rotación de dicho soporte mecánico (ET);
- medios que forman un bucle de servo control visual de la dirección de referencia en la dirección detectada de por lo menos un borde de contraste que pertenece al objetivo;
- medios para fusionar, mediante combinación lineal, dicha señal de control directa (UVOR) y la señal de comando de servo control visual.
12. Sistema según la reivindicación 11, caracterizado por el hecho de que los medios de control directo para orientar la dirección de referencia del dispositivo de detección sobre la base de la velocidad de rotación del soporte mecánico comprenden un corrector (CVOR(p)) capaz de controlar la dirección de referencia del dispositivo de detección (DD) en oposición de fase y con una ganancia substancialmente unitaria en relación con la posición angular de dicho soporte mecánico (ET), tal como para compensar rápidamente cualquier interrupción en la rotación provocada por el soporte mecánico (ET).
13. Sistema según la reivindicación 11 ó 12, caracterizado por el hecho de que los medios que forman un bucle de servo control visual comprenden al menos:
- dicho dispositivo de detección (DD),
- un inversor de polaridad (Inv) de la señal de salida suministrada por el dispositivo de detección (DD);
- una función de transferencia no lineal (ZSL);
- un corrector de bucle (Cv(p)).
14. Sistema para la fijación visual y el seguimiento fijo de un objetivo según cualquiera de las reivindicaciones 11 a 13, caracterizado por el hecho de que dichos medios de fusión están formando por un sustractor (St) que recibe la señal de salida suministrada por los medios de control directo y la señal de comando de servo control.
15. Procedimiento para detectar un borde de contraste (E) que tiene una zona de transición de la luz substancialmente rectilínea en una dirección especificada, el procedimiento especificado con la ayuda de un dispositivo según cualquiera de las reivindicaciones 1 a 10, caracterizado por el hecho de que consiste por lo menos en:
- ejecutar, en una dirección transversal diferente a esta dirección especificada, un escaneado periódico de la posición del ángulo visual global de un primer y un segundo sensor óptico, mediante la traslación relativa entre, por un lado, el conjunto formado por este primer y este segundo sensor óptico, y por el otro lado, la lente (L) es esta dirección diferente;
- medir la diferencia del tiempo, sobre la base de las señales suministradas por el primer y el segundo sensor óptico, que depende de la posición angular de esta zona de transición luminosa, en relación con una dirección de referencia, incluida en este ángulo visual global, sobre la base de la ley de escaneado, estando esta dirección de referencia vinculada con un valor específico de esta diferencia de tiempo.
Patentes similares o relacionadas:
SISTEMA Y MÉTODO DE INSPECCIÓN, del 12 de Diciembre de 2011, de ANTONIS, JAN: Un sistema para inspeccionar un objeto , comprendiendo el sistema una superficie de trabajo que proporciona un plano del objeto […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]