Un sistema (10) para inspeccionar un objeto (24, 124, 224), comprendiendo el sistema una superficie (28) de trabajo que proporciona un plano del objeto sobre el cual,
en uso, es situado el objeto a inspeccionar; y una cámara (12) dispuesta con respecto a la superficie de trabajo de manera que, por lo menos, parte de la superficie de trabajo está en el interior del campo de visión de la cámara, estando dispuesta la cámara para capturar una imagen del objeto, comprendiendo la imagen una serie de componentes de datos de la imagen, incluyendo además el sistema un aparato (14, 16) para procesar la imagen del objeto, estando dispuesto el aparato (10) para recibir la imagen del objeto desde la cámara (12) y para identificar una serie de dichos componentes de datos de la imagen del objeto, que representan la posición de un respectivo componente del borde del objeto en un plano de imagen, en donde, durante la captura de una imagen mediante la cámara (12), la cámara y el objeto están fijos entre sí, estando dispuesto el aparato (14, 16) de procesamiento para proyectar cada componente de datos del borde de la imagen sobre el plano del objeto con el propósito de producir un respectivo componente de datos del borde del objeto en el plano del objeto, estando dispuesto además el aparato (14, 16) de procesamiento para determinar si cada componente de datos del borde del objeto se refiere a un borde del objeto que está situado en la superficie de trabajo, o a un borde del objeto que está desplazado de la superficie de trabajo y para, tras determinar que un componente de datos del borde del objeto está desplazado de la superficie (28) de trabajo, ajustar el valor del componente de datos del borde del objeto en una cantidad que depende de la relación entre el tamaño del desplazamiento T en una dirección perpendicular a la superficie de trabajo y la distancia perpendicular (FPz) del punto focal de la cámara desde el plano del objeto
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04008677.
Solicitante: ANTONIS, JAN.
Nacionalidad solicitante: Reino Unido.
Dirección: 87 ULSTERVILLE GARDENS BELFAST BT9 7BB REINO UNIDO.
Inventor/es: Antonis,Jan.
Fecha de Publicación: .
Fecha Solicitud PCT: 12 de Abril de 2004.
Clasificación Internacional de Patentes:
G01B11/02F
G01B11/24G
Clasificación PCT:
G01B11/02FISICA. › G01METROLOGIA; ENSAYOS. › G01BMEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
G01B11/24G01B 11/00 […] › para la medida de contornos o curvaturas.
Clasificación antigua:
G01B11/02G01B 11/00 […] › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
G01B11/24G01B 11/00 […] › para la medida de contornos o curvaturas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
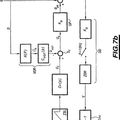
La presente invención se refiere al campo de la inspección de objetos y del procesamiento de imágenes. Antecedentes de la Invención Existe una amplia variedad de aplicaciones que requieren la inspección de objetos para determinar o verificar sus dimensiones. Por ejemplo, durante o después de la fabricación de un objeto, puede ser necesario verificar las dimensiones del objeto con propósitos de control de calidad. Alternativamente, puede desearse determinar las dimensiones de un objeto con propósitos de ingeniería inversa. Son bien conocidos los sistemas de inspección automática que utilizan cámaras digitales, especialmente para inspeccionar objetos planos en general, tales como chapa metálica o placas de circuito impreso. Los datos de imagen capturados por una cámara digital se crean proyectando luz en 3D sobre un detector 2D. Una forma habitual de volver a transformar esta información en datos 3D es capturar imágenes desde puntos de vista múltiples. Pueden conseguirse puntos de vista múltiples utilizando múltiples cámaras, o desplazando una sola cámara con un dispositivo de posicionamiento de precisión. Alternativamente, algunos sistemas utilizan equipamiento óptico especializado, tal como lentes telecéntricas o una cámara de barrido de líneas, para constreñir el sistema de manera que puedan resolverse los datos de medición 3D a partir de una sola imagen. La solicitud de patente europea EP 1 154 227 da a conocer un método y un aparato de detección de bordes, en los cuales se sintetiza una imagen de un objeto a partir de cuatro imágenes diferentes del objeto. Un problema con los sistemas de inspección convencionales del tipo esbozado anteriormente, es que son costosos. Como resultado, en muchas aplicaciones la inspección sigue realizándose manualmente utilizando calibres o reglas. Por lo tanto, sería deseable dar a conocer un sistema de inspección que no requiera múltiples cámaras, movimiento relativo entre el objeto y la cámara, o equipamiento óptico especializado. Resumen de la Invención La invención da a conocer un sistema para inspeccionar un objeto, acorde con la reivindicación 1. En las realizaciones preferidas, el objeto plano, y por lo tanto la superficie de trabajo, es sustancialmente perpendicular al eje óptico de la cámara. Asimismo, se prefiere que el objeto esté situado sobre la superficie de trabajo, de tal modo que el eje óptico de la cámara cruce el objeto cuando la imagen es capturada. El aparato de procesamiento puede utilizar parámetros que incluyen el grosor del objeto (en una dirección perpendicular al plano del objeto), la distancia del punto focal de la cámara sobre el plano del objeto (en una dirección perpendicular al plano del objeto) y/o datos relativos a la forma del perfil del borde del objeto. El aparato de procesamiento puede disponerse para recibir parte o la totalidad de esta información mediante entradas de usuario, y/o desde memoria local o accesible de otro modo. Ventajosamente, la cámara comprende una lente no telecéntrica. En una realización preferida, el aparato de procesamiento determina si cada componente de datos del borde del objeto se refiere a un borde del objeto que queda sobre la superficie de trabajo o a un borde del objeto que está separado, o desplazado, respecto de la superficie de trabajo, y la cantidad de desplazamiento. En una realización, esto se consigue calculando un respectivo primer parámetro relativo a una línea de referencia virtual que se extiende desde el componente de datos del borde del objeto, calculando un segundo parámetro relativo a una línea virtual que se extiende entre el componente de datos del objeto y un punto de referencia en el plano del objeto, y comparando con un valor umbral la diferencia entre dicho primer parámetro y dicho segundo parámetro. Preferentemente, dicha línea de referencia virtual que se extiende desde el componente de datos del objeto, comprende una línea que es normal, o sustancialmente normal, al borde detectado del cual forma parte el componente de datos del objeto. Convenientemente, el aparato calcula dicho primer parámetro desde uno o varios otros componentes respectivos de datos del objeto, que están situados a cada lado del componente de datos del objeto sobre el borde detectado. 2 En el presente documento, cuando el punto de referencia comprende la posición del punto focal de la cámara, la línea de referencia virtual que se extiende entre el componente de datos del objeto y dicho punto de referencia se denomina la línea radial. En la realización preferida, en la que dicho primer parámetro comprende el valor de dicho ángulo de dicha línea normal y dicho segundo parámetro comprende el valor de dicho ángulo de dicha línea radial, dicho valor umbral es de 90 grados. Preferentemente, el aparato está dispuesto para determinar que el componente de datos del objeto se refiere a un borde superior (es decir, separado de la superficie de trabajo) si la diferencia absoluta entre dichos primer y segundo parámetros es mayor de 90 grados, y que el componente de datos del objeto se refiere a un borde inferior (es decir, en la superficie de trabajo) si la diferencia absoluta entre dichos primer y segundo parámetros es menor de 90 grados. En realizaciones particularmente preferidas, el aparato de procesamiento está dispuesto para calcular una línea de visión desde el punto focal de la cámara al componente de datos del borde del objeto, y para determinar el punto en que la línea de visión se encuentra sustancialmente con el borde del objeto, y para determinar la cantidad de desplazamiento en función de la posición de dicho punto. En las reivindicaciones dependientes se enumeran otras características preferidas de la invención. La invención da a conocer, además, un método de procesamiento de una imagen de un objeto, acorde con la reivindicación 11. La invención da a conocer además un producto de programa informático, acorde con la reivindicación 12. En todos sus aspectos, la invención es particularmente adecuada para su utilización con componentes de datos de imagen correspondientes a un respectivo punto, o componente, o un borde de un objeto. Preferentemente, los componentes de datos de la imagen se obtienen a partir de una silueta, o contorno de oclusión, del objeto y corresponden a uno o varios bordes detectados del objeto. Además, la invención en todos sus aspectos es particularmente adecuada para inspeccionar objetos planos en general, tales como chapa metálica, PCBs, tela, cartulina, láminas plásticas, o cualesquiera otros objetos opacos, planos en general, especialmente aquellos que están perforados o perfilados. Para los expertos en la materia, resultarán evidentes otros aspectos ventajosos de la invención tras examinar la siguiente descripción de una realización específica, y haciendo referencia a los dibujos adjuntos. Breve Descripción de los Dibujos A continuación se describe una realización específica de la invención a modo de ejemplo, y haciendo referencia a los dibujos anexos, en los cuales: la figura 1 es un diagrama esquemático de un sistema de inspección, que realiza un sistema acorde con la invención, estando el sistema situado in situ sobre un objeto a inspeccionar; la figura 2 es un diagrama de flujo que ilustra un primer ejemplo del funcionamiento de un módulo de procesamiento de datos incluido en el sistema de la figura 1; la figura 3 es una ilustración de una polilínea, compuesta de una serie de puntos de bordes del objeto; la figura 4 es una ilustración del examen del borde de un objeto inspeccionado; y la figura 5 es una ilustración de cómo determinar un punto real del borde desde un punto del borde proyectado. La figura 6 presenta una vista en sección lateral de un objeto con un borde biselado; la figura 7 presenta una vista en sección lateral, de un objeto con un borde socavado; la figura 8 presenta una vista en planta de un objeto a inspeccionar; la figura 9 presenta una vista en sección lateral, de un objeto con un borde biselado y el punto focal de la cámara; la figura 10 presenta una vista en sección lateral, de otro objeto con un borde biselado y el punto focal de la cámara; 3 la figura 11 es un diagrama de flujo que ilustra un segundo ejemplo del funcionamiento del módulo de procesamiento de datos incluido en el sistema de la figura 1; la figura 12 es un diagrama de flujo que ilustra un tercer ejemplo del funcionamiento del módulo de procesamiento de datos incluido en el sistema de la figura 1; la figura 13 presenta una vista en sección lateral, de un objeto con un borde curvo y el punto focal de la cámara; y la figura 14 es un diagrama de flujo que ilustra un cuarto ejemplo del funcionamiento del módulo de procesamiento de datos incluido en el sistema de la figura 1. Descripción Detallada de los Dibujos En la siguiente descripción, se adopta un sistema de coordenadas... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (10) para inspeccionar un objeto (24, 124, 224), comprendiendo el sistema una superficie (28) de trabajo que proporciona un plano del objeto sobre el cual, en uso, es situado el objeto a inspeccionar; y una cámara (12) dispuesta con respecto a la superficie de trabajo de manera que, por lo menos, parte de la superficie de trabajo está en el interior del campo de visión de la cámara, estando dispuesta la cámara para capturar una imagen del objeto, comprendiendo la imagen una serie de componentes de datos de la imagen, incluyendo además el sistema un aparato (14, 16) para procesar la imagen del objeto, estando dispuesto el aparato (10) para recibir la imagen del objeto desde la cámara (12) y para identificar una serie de dichos componentes de datos de la imagen del objeto, que representan la posición de un respectivo componente del borde del objeto en un plano de imagen, en donde, durante la captura de una imagen mediante la cámara (12), la cámara y el objeto están fijos entre sí, estando dispuesto el aparato (14, 16) de procesamiento para proyectar cada componente de datos del borde de la imagen sobre el plano del objeto con el propósito de producir un respectivo componente de datos del borde del objeto en el plano del objeto, estando dispuesto además el aparato (14, 16) de procesamiento para determinar si cada componente de datos del borde del objeto se refiere a un borde del objeto que está situado en la superficie de trabajo, o a un borde del objeto que está desplazado de la superficie de trabajo y para, tras determinar que un componente de datos del borde del objeto está desplazado de la superficie (28) de trabajo, ajustar el valor del componente de datos del borde del objeto en una cantidad que depende de la relación entre el tamaño del desplazamiento T en una dirección perpendicular a la superficie de trabajo y la distancia perpendicular (FPz) del punto focal de la cámara desde el plano del objeto. 2. Sistema (10) acorde con la reivindicación 1, en el que cuando un perfil del borde del objeto (224) tomado en un plano perpendicular al plano del objeto es perpendicular al plano del objeto, o está socavado, dicho componente de datos del borde del objeto es ajustado restando una cantidad sustancialmente igual a dicha relación multiplicada por la distancia relativa entre el componente de datos del borde del objeto (OEPx) y la posición (FPx,y) del punto focal de la cámara en el plano del objeto. 3. Un sistema (10) acorde con la reivindicación 1, en el que cuando un perfil del borde del objeto (124) tomado en un plano perpendicular al plano del objeto está biselado, el aparato (14, 16) de procesamiento está dispuesto para determinar si el ángulo del perfil del borde biselado es mayor que el ángulo formado por una línea de visión (LoSEA) desde el punto focal de la cámara a dicho componente de datos del borde del objeto y, tras la determinación, para ajustar dicho componente de datos del borde del objeto restando una cantidad sustancialmente igual a dicha relación multiplicada por la distancia relativa entre el componente de datos del borde del objeto (OEPX) y la posición (FPx,y) del punto focal de la cámara en el plano del objeto, y sumando una cantidad sustancialmente igual a la distancia, en el plano del objeto, entre los bordes del perfil biselado a lo largo de dicha línea de visión. 4. Un sistema (10) acorde con la reivindicación 1, en el que cuando un perfil del borde del objeto (224) tomado en un plano perpendicular al plano del objeto está socavado, y cuando el aparato (14, 16) de procesamiento determina que un componente de datos del borde del objeto se refiere a un borde del objeto que está situado sobre la superficie de trabajo (28), el aparato de procesamiento está dispuesto para determinar si el ángulo del perfil del borde socavado es mayor que el ángulo formado por una línea de visión (LoSEA) desde el punto focal de la cámara a dicho componente de datos del borde del objeto (OEPX) y, tras la determinación, para ajustar dicho componente de datos del borde del objeto en una cantidad sustancialmente igual a la distancia, en el plano del objeto, entre los bordes del perfil socavado a lo largo de dicha línea de visión. 5. Un sistema (10) acorde con cualquier reivindicación precedente, en el que el aparato (14, 16) de procesamiento determina si cada componente de datos del borde del objeto se refiere a un borde del objeto que está situado sobre la superficie de trabajo (28) o a un borde del objeto que está separado de la superficie de trabajo (28), calculando un respectivo primer parámetro relativo a una línea de referencia virtual (N4, N5) que se extiende desde el componente de datos del borde del objeto (OEP4, OEP5), calculando un segundo parámetro relativo a una línea virtual (R4, R5) que se extiende entre el componente de datos del objeto y un punto de referencia (FPx,y) en el plano del objeto, y comparando la diferencia entre dicho primer parámetro y dicho segundo parámetro con un valor umbral. 6. Sistema (10) acorde con la reivindicación 5, en el que dicho primer parámetro comprende el valor de un ángulo (NA4, NA5) entre un eje de referencia del ángulo y dicha línea de referencia virtual (N4, N5) que se extiende desde el componente de datos del borde del objeto (OEP4, OEP5). 7. Un sistema (10) acorde con la reivindicación 5 ó 6, en el que dicho segundo parámetro comprende el valor de un ángulo (RA4, RA5) entre el eje de referencia del ángulo y dicha línea de referencia virtual (R4, R5) que se extiende entre el componente de datos del borde del objeto (OEP4, OEP5) y dicho punto de referencia (FPx,y). 8. Un sistema (10) acorde con cualquiera de las reivindicaciones 5 a 7, en el que dicho punto de referencia (FPx,y) sobre el plano del objeto comprende la posición del punto focal de la cámara en el plano del objeto, y dicha línea de referencia virtual (N4, N5) que se extiende desde el componente de datos del borde del objeto (OEP4, OEP5) 13 comprende una línea normal al objeto en dicho componente de datos del borde del objeto, y en el que dicho valor umbral es de 90 grados. 9. El sistema (10) acorde con la reivindicación 1, en el que el aparato de procesamiento está dispuesto para calcular una línea de visión (LoSEA) desde el punto focal de la cámara hasta el componente de datos del borde del objeto, y para determinar el punto en que la línea de visión se encuentra sustancialmente con el borde del objeto, y determinar la cantidad de desplazamiento en función de la posición de dicho punto. 10. Un sistema (10) acorde con la reivindicación 9, en el que la línea de visión (LoSEA) está situada en un plano sustancialmente normal al borde del objeto, en la posición del componente de datos del borde del objeto. 11. Un método de procesamiento de un objeto de imagen en un sistema (10) para inspeccionar un objeto (24, 124, 224), comprendiendo el sistema una superficie de trabajo (28) que proporciona un plano del objeto sobre el cual, en uso, está situado el objeto a inspeccionar, y una cámara (12) dispuesta con respecto a la superficie de trabajo de manera que, por lo menos, parte de la superficie de trabajo está en el interior del campo de visión de la cámara, estando dispuesta la cámara para capturar una imagen del objeto, comprendiendo la imagen una serie de componentes de datos de imagen, y en donde, durante la captura de una imagen mediante la cámara, la cámara y el objeto están fijos entre sí, comprendiendo el método recibir la imagen del objeto desde la cámara (12); identificar una serie de componentes de datos de dicha imagen que representan la posición de un respectivo componente del borde del objeto en un plano de imagen; proyectar cada componente de datos del borde de la imagen sobre el plano del objeto, para producir un respectivo componente de datos del borde del objeto en el plano del objeto; determinar si cada componente de datos del borde del objeto se refiere a un borde del objeto que está situado sobre la superficie (28) de trabajo, o a un borde del objeto que está desplazado desde la superficie de trabajo; y, tras determinar que un componente de datos del borde del objeto está desplazado respecto de la superficie de trabajo, ajustar el valor del componente de datos del borde del objeto, en una cantidad que depende de la relación entre el tamaño del desplazamiento T en una dirección perpendicular a la superficie (28) de trabajo y la distancia perpendicular (FPz) del punto focal de la cámara desde el plano del objeto. 12. Un producto de programa informático que comprende código informático utilizable para hacer que un ordenador lleve a cabo un método de procesamiento de una imagen de un objeto en un sistema (10) para inspeccionar un objeto (24, 124, 224), comprendiendo el sistema una superficie (28) de trabajo que proporciona un plano del objeto en el cual, en uso, está situado el objeto a inspeccionar; y una cámara (12) dispuesta con respecto a la superficie (28) de trabajo de manera que, por lo menos, parte de la superficie de trabajo está en el interior del campo de visión de la cámara, estando dispuesta la cámara para capturar una imagen del objeto, comprendiendo la imagen una serie de componentes de datos de la imagen, y donde, durante la captura de una imagen mediante la cámara, la cámara y el objeto están fijos entre sí, en donde dicho método comprende recibir la imagen del objeto desde la cámara (12), identificar una serie de componentes de datos de la imagen que representan la posición de un respectivo componente del borde del objeto en un plano de la imagen; proyectar dicho componente de datos del borde de la imagen sobre el plano del objeto para producir un respectivo componente de datos del borde del objeto, en el plano del objeto; determinar si cada componente de datos del borde del objeto se refiere a un borde del objeto que está situado sobre la superficie (28) de trabajo, o a un borde del objeto que está desplazado de la superficie de trabajo; y, tras determinar que un componente de datos del borde del objeto está desplazado respecto de la superficie de trabajo, ajustar el valor del componente de datos del borde del objeto en una cantidad que depende de la relación entre el tamaño del desplazamiento T en una dirección perpendicular a la superficie de trabajo y la distancia perpendicular (FPz) del punto focal de la cámara desde el plano del objeto. 14 16 17 18 19 21 22 23 24
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE DETECCION HIPERAGUDA DE UN BORDE DE CONTRASTE SENSIBLEMENTE RECTILINEO Y SISTEMA DE FIJACION Y SEGUIMIENTO FINO DE DICHO BORDE DE CONTRASTE, del 14 de Octubre de 2010, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS): Dispositivo para detectar un borde de contraste (E) que tiene una zona de transición de la luz substancialmente rectilínea en una dirección especificada, comprendiendo dicho […]
Transferencia con control de contorno, del 29 de Julio de 2020, de JUNGHEINRICH AKTIENGESELLSCHAFT: Disposición para el control de contorno de palés que deben almacenarse en un sistema de estanterías, que comprende:
una estación de transferencia […]
Dispositivo y procedimiento para medir la forma de una porción de pared de un horno de coque, del 15 de Julio de 2020, de Centre de Pyrolyse du Charbon de Marienau: Un dispositivo para medir una forma de una porción de pared de un horno de coque , comprendiendo el dispositivo :
- una caja […]
Dispositivo y método para medir la rectitud de una pieza de trabajo en forma de varilla, del 15 de Julio de 2020, de MSG Maschinenbau GmbH: Dispositivo para medir la rectitud de una pieza de trabajo en forma de varilla con un soporte para la pieza de trabajo en forma de varilla y un aparato para detectar […]
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método:
la introducción de datos del modelo asociado con la pieza de trabajo […]
Equipo y procedimiento para la fabricación de piezas de prótesis dental, del 18 de Marzo de 2020, de INSTITUT STRAUMANN AG: Equipos de captación de superficies y equipos de generación de superficies, con equipos para la detección parcial o totalmente automática de bordes de preparaciones […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 PROCEDIMIENTO Y DISPOSITIVO DE DETECCION HIPERAGUDA DE UN BORDE DE CONTRASTE SENSIBLEMENTE RECTILINEO Y SISTEMA DE FIJACION Y SEGUIMIENTO FINO DE DICHO BORDE DE CONTRASTE, del 14 de Octubre de 2010, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS): Dispositivo para detectar un borde de contraste (E) que tiene una zona de transición de la luz substancialmente rectilínea en una dirección especificada, comprendiendo dicho […]
PROCEDIMIENTO Y DISPOSITIVO DE DETECCION HIPERAGUDA DE UN BORDE DE CONTRASTE SENSIBLEMENTE RECTILINEO Y SISTEMA DE FIJACION Y SEGUIMIENTO FINO DE DICHO BORDE DE CONTRASTE, del 14 de Octubre de 2010, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS): Dispositivo para detectar un borde de contraste (E) que tiene una zona de transición de la luz substancialmente rectilínea en una dirección especificada, comprendiendo dicho […]