DETECCION DE TORBELLINOS Y MEDICION DE LA TURBULENCIA.
Un procedimiento para una aeronave provista de un sistema eléctrico de control de vuelo para mejorar el vuelo en aire perturbado,
que comprende los siguientes pasos: recibir una señal de dirección del flujo de aire actual (ALFACV) desde un sensor de ángulo de ataque (102), y;
que se caracteriza por los siguientes pasos
- crear (125, 105, 120, 115, 110) una señal de ángulo de ataque sintética, más calmada que la señal de dirección del flujo de aire actual recibida desde el sensor de ángulo de ataque;
- usar la citada señal de dirección del flujo de aire para formar (220, 210), junto con la señal de ángulo de ataque sintética, una señal de nivel de torbellino de estela (VORSET) que es representativa de un nivel actual torbellino de estela del aire con el que se encuentra la aeronave;
- probar (230) la magnitud de la citada señal de torbellino de estela (VORSET);
- sobre la base de la citada magnitud, decidir (230, 240) si la aeronave está pasando a través de un torbellino de estela turbulenta de aire perturbado o no;
- si se considera que el avión pasa a través de un aire perturbado de torbellino, cambiar la forma de control, y
- decidir (230, 240), sobre la base de la citada magnitud, cuando se pasa por el torbellino de estela turbulenta, y si es así, volver a la forma normal de control,
- en el que el cambio de modo de control incluye cambiar la señal de entrada de ángulo de ataque de lo que se mide por los sensores de ángulo de ataque (102, 103) a la señal de ángulo de ataque sintética, más calmada, cuando el avión pasa por aire perturbado de torbellino, y viceversa, cuando la aeronave ha entrado de nuevo en el aire no perturbado
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06113595.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: SODERMALMSVAGEN 6,586 63 LINKOPING.
Inventor/es: PERSSON,TOMMY, HILLGREN,ROBERT, KARLSSON,FREDRIK.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Mayo de 2006.
Fecha Concesión Europea: 10 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G05D1/06B2
Clasificación PCT:
- G05D1/06 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Régimen de modificación de la altitud o de la profundidad.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Detección de torbellinos y medición de la turbulencia.
Campo de la invención
La presente invención se refiere a la detección y evaluación a bordo de una aeronave del flujo de aire circundante. En particular, se refiere a un procedimiento para una aeronave que está provista de un sistema eléctrico de control de vuelo para mejorar el vuelo en aire perturbado, y a un dispositivo de detección de turbulencia utilizable en un sistema eléctrico de control de vuelo de una aeronave para mejorar el paso a través de aire perturbado.
Antecedentes
Los aviones militares de combate y de ataque de cuarta generación están diseñados de manera que son básicamente aviones estáticamente inestables que son estabilizados por un sistema eléctrico de control de vuelo que ajusta continuamente una serie de superficies de control. Este diseño es elegido con el fin de lograr el máximo rendimiento posible en toda la envolvente de vuelo. El sistema eléctrico de control de vuelo utiliza la información de sensores en relación con los parámetros de vuelo del avión, tales como el cabeceo, el balanceo y la guiñada. El sistema también recibe y utiliza información sobre el viento y las ráfagas. El propósito principal de utilizar la información es minimizar la influencia de las perturbaciones externas que puedan deteriorar el rendimiento y las otras prestaciones de control, con el fin de obtener un mejor rendimiento de los aviones y de los sistemas de armas. La información puede provenir de las señales de giroscopio interior y de la presión total y estática (tubos de pitot) y de los ángulos de ataque y de derrape (álabes alfa y beta).
Sin embargo, pueden surgir algunas dificultades cuando uno de estos aviones pasa involuntariamente a través de torbellinos de estela producidos por otro avión. El sistema de control eléctrico que se ajusta continuamente recibe señales de los sensores del paso por un torbellino de estela, que dan lugar a movimientos involuntarios de las superficies de control y una respuesta involuntaria de las aeronaves. Esto puede conducir a que el ángulo de ataque rebase los límites de ángulo de ataque.
El documento US 5 995 880 desvela un procedimiento para que una aeronave provista de un sistema eléctrico de control de vuelo mejore el vuelo a través de aire perturbado.
Por lo tanto, un objeto de la presente invención es proporcionar una solución que reduce el riesgo de un menor control de un avión de cuarta generación al pasar a través de torbellinos de estela.
Sumario de la invención
Con el fin de lograr la reducción de riesgo y el aumento del rendimiento que se han mencionado más arriba y al mismo tiempo estabilizar el avión que es estáticamente inestable y además proporcionar un uso durante las misiones "despreocupado" de la aeronave, por decirlo de esa manera, es decir, de manera que el piloto no tenga que considerar los límites de pérdida de sustentación, límites estructurales, límites de los motores, etc., se proporciona un sistema de acuerdo con la presente invención. Con el fin de alcanzar esto y mantener una buena puntería y características de vuelo, la información de los sensores se introduce en el sistema de control de vuelo en lo que se refiere a los parámetros de posición de la aeronave a partir de las señales de giroscopio de la velocidad angular y del ángulo de ataque de los álabes alfa situados en la proa del avión. Los álabes alfa en la proa del avión tienen la función primaria de medir el ángulo de la corriente de aire entrante y la magnitud de las perturbaciones externas, tales como el viento y la turbulencia. El sistema de control está provisto de medios para compensar estas perturbaciones, con lo cual minimiza la desviación de la posición ordenada por el piloto, por ejemplo, cuando apunta.
Cuando un avión vuela, crea torbellinos de estela. La fuerza de los citados torbellinos de estela depende del peso y del factor de carga de la aeronave. Durante la práctica del combate aéreo que utiliza un avión objetivo, puede ocurrir que la aeronave perseguidora pase a través los torbellinos de estela del avión objetivo. Esto puede ser peligroso puesto que el avión puede resultar afectado fuertemente por los torbellinos de estela de la aeronave delantera, si el paso se realiza de una manera inadecuada. Por lo tanto, como norma general para todas las aeronaves, los torbellinos de estela deben ser evitados.
Los álabes alfa de un avión son influenciados durante el paso de tales torbellinos de estela, lo cual puede conducir a órdenes innecesarias a superficies de control tales como el timón, elevador y alerones, lo cual a su vez puede causar grandes ángulos de ataque si el avión se encuentra próximo al ángulo de ataque límite durante el paso de los torbellinos de estela de la aeronave delantera.
Por lo tanto, durante el paso a través de los torbellinos de estela existe la necesidad de una señal de ángulo de ataque que sea más calmada, de manera que se puedan evitar los movimientos grandes y desfavorables de las superficies de control.
Por lo tanto, un propósito adicional de la presente invención es proporcionar un procedimiento y un dispositivo que puedan cambiar a otra señal de ángulo de ataque cuando pasa por un torbellino de estela, pero manteniendo todavía buenas o excelentes características de vuelo y de puntería cuando se vuela en aire en calma y turbulento.
Breve descripción de los dibujos
Las figuras 1a y b muestran un diagrama de bloques de un detector de estela turbulenta.
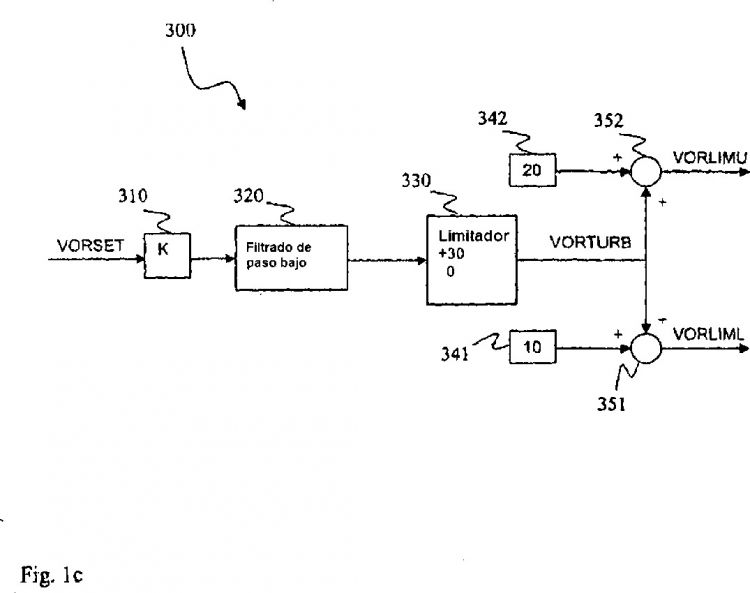
La figura 1c muestra una unidad de nivel de turbulencia para el uso en el detector de estela turbulenta de las figura 1a y b.
Descripción detallada de realizaciones preferidas
La siguiente expresión se utiliza en este documento con su significado definido. La expresión "aire perturbado" significa aire tal como aire turbulento, cambios de viento, vientos cruzados, corrientes de aire, torbellinos de estela, escapes de motores, soplos de hélices, etc.
Con el fin de poder cambiar a una señal de ángulo de ataque más calmada cuando se pasa por una estela turbulenta, se proporciona un detector de estela turbulenta. El detector de estela turbulenta se puede utilizar para controlar el cambio a una señal de ángulo de ataque más calmada y/o para cambiar a otra ley de control cuando se pasa por una estela turbulenta o cuando se pasa a través de aire turbulento de una cierta magnitud.
Las figuras 1a, 1b, 1c muestran un diagrama de bloques de un detector de torbellino de estela. Un sensor izquierdo 102 de ángulo de ataque y un sensor derecho 103 de ángulo de ataque, preferiblemente sensores de álabe alfa, están conectados a unidades de corrección de de error de posición 101, 106. Las citadas unidades de corrección de error de posición 101, 106 están diseñadas para corregir cada señal del sensor en lo que se refiere a los errores de posición producidos por su posición real en el fuselaje del avión. Una unidad de monitorización de ángulo de ataque 107 está conectada a las unidades de corrección de error de posición 101, 106 y recibe las señales corregidas del ángulo de ataque. La unidad de monitorización de ángulo de ataque 107 monitoriza la diferencia entre las señales corregidas izquierda y derecha. Si la diferencia se encuentra en un cierto umbral de monitorización, se calcula una señal ALFACV de ángulo de ataque como promedio de las señales de álabe alfa de posición izquierda y derecha corregidas. Si la diferencia es mayor que el umbral de monitorización, se detecta un fallo de sensor de álabe alfa. La unidad de monitorización 107 de ángulo de ataque está conectada a un filtro de paso bajo ALFACV 105 y la señal ALFACV se alimenta a la citada unidad de filtro de paso bajo ALFACV 105, que filtra la señal formando una ALFACV filtrada, que en la presente memoria descriptiva y a continuación se denominará ALFACVFIL.
La figura 1a muestra además cómo se determina una señal auxiliar, aquí llamada ALFAF. El significado de ALFAF se explicará adicionalmente más adelante.
En primer lugar, se crea una señal representativa de un régimen de ángulo de ataque sintético, ALFADOT.
El régimen de ángulo de ataque ALFADOT se calcula a partir de la ecuación de la fuerza en el eje z utilizando la siguiente expresión:
en la que Nz es el factor de carga en el eje z, ? es el ángulo de actitud de cabeceo,
Reivindicaciones:
1. Un procedimiento para una aeronave provista de un sistema eléctrico de control de vuelo para mejorar el vuelo en aire perturbado, que comprende los siguientes pasos: recibir una señal de dirección del flujo de aire actual (ALFACV) desde un sensor de ángulo de ataque (102), y;
que se caracteriza por los siguientes pasos
2. El procedimiento de la reivindicación 1, en el que el sensor de ángulo de ataque es un sensor de álabe alfa.
3. El procedimiento de la reivindicación 1 ó 2, en el que un régimen de ángulo de ataque sintético se forma en base a la expresión (I) para estimar el régimen de ángulo de ataque,
en el que ALFADOT es el régimen de ángulo de ataque estimado, Nz es el factor de carga en el eje z, ? es el ángulo de actitud de cabeceo,
4. El procedimiento de la reivindicación 3, en el que el régimen de ángulo de ataque sintético pasa a través de una unidad de constante de tiempo y posteriormente se utiliza para formar un régimen de ángulo de ataque sintético que es suave.
5. El procedimiento de la reivindicación 4, en el que una señal de diferencia entre la señal de ángulo de ataque (ALFACV) y la señal de ángulo de ataque sintético más calmada (ALFAF) se utiliza para indicar cuanto el aire está perturbado.
6. Un dispositivo de detección de turbulencias utilizable en un sistema eléctrico de control de vuelo de una aeronave para mejorar el paso por aire perturbado que incluye un sensor de ángulo de ataque (102, 103),
que se caracteriza por:
7. El dispositivo de detección de turbulencia, de acuerdo con la reivindicación 6 que es un dispositivo de detección de torbellino de estela, que comprende:
8. El dispositivo de detección de turbulencias de la reivindicación 7, en el que la citada unidad de estimación de régimen de ángulo de ataque (110) utiliza la expresión (I) para estimar el régimen de ángulo de ataque,
en el que ALFADOT es el régimen de ángulo de ataque estimado, Nz es el factor de carga en el eje z, ? es el ángulo de actitud de cabeceo,
Patentes similares o relacionadas:
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Método y sistema para controlar el vuelo de una aeronave sometida a al menos dos tiempos requeridos de restricciones de llegada, del 3 de Abril de 2019, de THE BOEING COMPANY: Un método para controlar el vuelo de una aeronave sometida a dos restricciones de tiempo de llegada requeridas, que comprende la etapa de: a) recibir dos tiempos […]
Sistemas y métodos para evitar que la cola de una aeronave entre en contacto con el suelo, del 8 de Enero de 2019, de THE BOEING COMPANY: Un método que comprende: determinar un perfil de descenso sobre la base de una altitud actual y una velocidad vertical actual de una aeronave […]
Procedimiento y dispositivo de calibración de sistemas de aproximación de aeropuertos mediante el uso de naves no tripuladas, del 29 de Octubre de 2018, de CANARD DRONES S.L: Procedimiento y sistema para el calibrado o ajuste de sistemas visuales de ayuda para el aterrizaje de aeronaves (VGSI) que se realiza con una aeronave capaz de realizar […]
Deflexiones de dispositivo de borde de ataque y de salida durante el descenso de una aeronave, del 25 de Septiembre de 2018, de THE BOEING COMPANY: Sistema para aumentar una velocidad de descenso de una aeronave, comprendiendo el sistema: un ordenador de control de vuelo configurado para calcular un primer […]